
Квадрокоптер из ардуино с управлением через телефон
Основная идея проекта - создать недорогой квадрокоптер, который имеет автономное питание и алгоритм стабилизации полета на Arduino.
Помимо Arduino нам понадобятся гироскоп/акселерометр и щеточные моторы. В приведенном проекте не рассмотрены методы управления полетом квадрокоптера, но их однозначно можно добавить. Стоимость данного квадрокоптера приблизительно равна 60$.
Что такое квадрокоптер?
Уверен, что большинство читающих эту статью уже знают, что такое квадрокоптер. Если нет, привожу краткое описание этих замечательных устройств.
Квадрокоптер - это летающее устройство с четырьмя "ногами", на каждой из которых установлен мотор с пропеллером. Квадрокоптеры по своей сути схожи с вертолетами, но перемещение, поворот, наклон у них обеспечивается за счет синхронной работы четырех пропеллеров. Кроме того, у квадрокоптеров существует такое понятие как “pitch” (“тангаж”) – поворот вокруг продольной оси. Для того, чтобы стабилизировать полет квадрокоптера, два пропеллера вращаются в одно направлении (по часовой стрелке), а два - в противоположном направлении (против часовой стрелки). Благодаря этой возможности - зависать в одном положении в воздухе, квадрокоптеры в первую очередь используются для фотографии с воздуха и видеосъемки. Конечно же, квадрокоптеры и остальные подобные устройства со множеством двигателей, используются в спасательных операциях, полицией, военными и т.п. В последнее время стоимость компонентов для производства квадрокоптеров значительно уменьшилась и многие компании принялись за их производство. Купить готовое изделие на сегодняшний день не составит проблем.
Итак, вы уже немного сориентировались, что такое квадрокоптер, давайте теперь перейдем к краткому описанию процесса его изготовления.
Первое, что было сделано: гуглинг по магазинам в поисках компонентов, которые нам понадобятся для его изготовления.
В большинстве случаев используются микроконтроллеры и безщеточные (вентильные) моторы. В качестве контроллера было решено использовать Arduino, так как это идеальная платформа с точки зрения цены. Первая проблема, которая возникла - безщеточные двигатели. Помните, мы ведь ориентируемся на бюджет в 60 $. А стоимость одного безщеточного двигателя, который можно использовать в нашей конструкции квадрокоптера, колеблется в диапазоне от 20 $ до 60 $! Кроме того, использование этих моторов предполагает установку дополнительных контроллеров - speedcontrollers. Так что было решено использовать щеточные двигатели. Габариты нашего квадрокоптера небольшие, так что были куплены моторы с относительно маленьким крутящим моментом. Гугл подсказал, что квадрокоптеры с подобными приводами существуют. Найденные моторы могут поднять до 55 грамм веса, что нас вполне устроило. Следующий шаг - решение проблем стабилизации моторов с помощью гироскопов и акселерометров. Гироскоп - это устройство, которое использует гравитацию Земли для определения угла наклона (ориентации) в пространстве. Классическая конструкция гироскопа состоит из свободно вращающегося диска, который называется ротором. Ротор установлен на оси, которая расположена по центру большего, более стабильного колеса. При вращении оси ротор остается в статичном состоянии, которое соответствует центру гравитации. Акселерометр же представляет из себя компактное устройство, которое используется для измерения ускорения. Когда объект выходит из состояния покоя (начинает двигаться) акселерометр фиксирует вибрации, которые возникают при этом движении. В акселерометрах используются микроскопические кристаллы, которые генерируют напряжение при ударах. Это напряжение снимается и формируется значение ускорения. Эти два сенсора обязательны в квадрокоптере. Именно на основании их показаний формируется управляющий сигнал, который регулирует скорость вращения двигателей для обеспечения крена, перемещения или стабилизации нашего квадрокоптера.

Необходимые узлы, детали и оборудование
Для проекта квадрокоптера с управлением от Arduino нам понадобятся:
- - провода;
- - литиевые аккумуляторы на 3.7 В;
- - транзистор: ULN2003A Darlington Transistor (можно взять транзистор, который поддерживает нагрузки и побольше);
- - моторы: 0820 Coreless Motors;
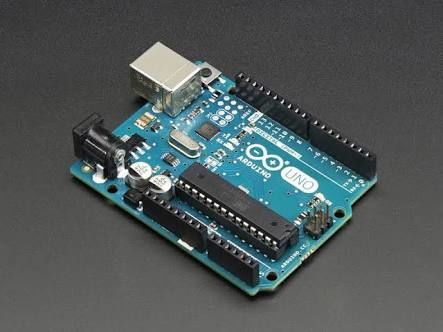
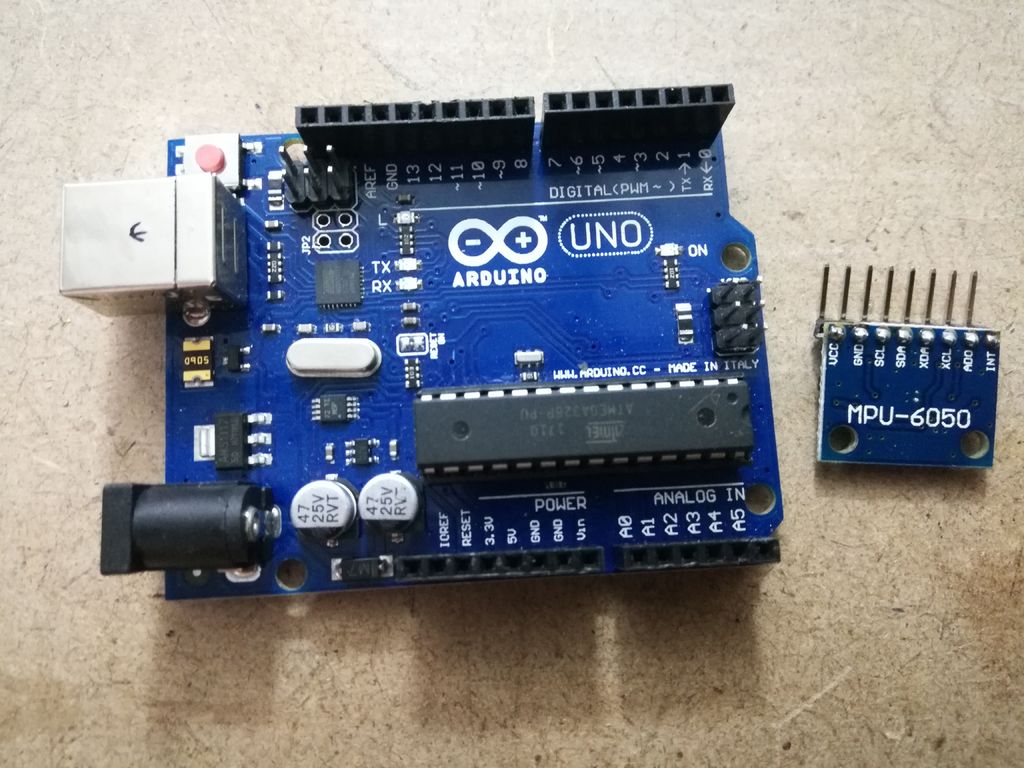
- - микроконтроллер: Arduino Uno;
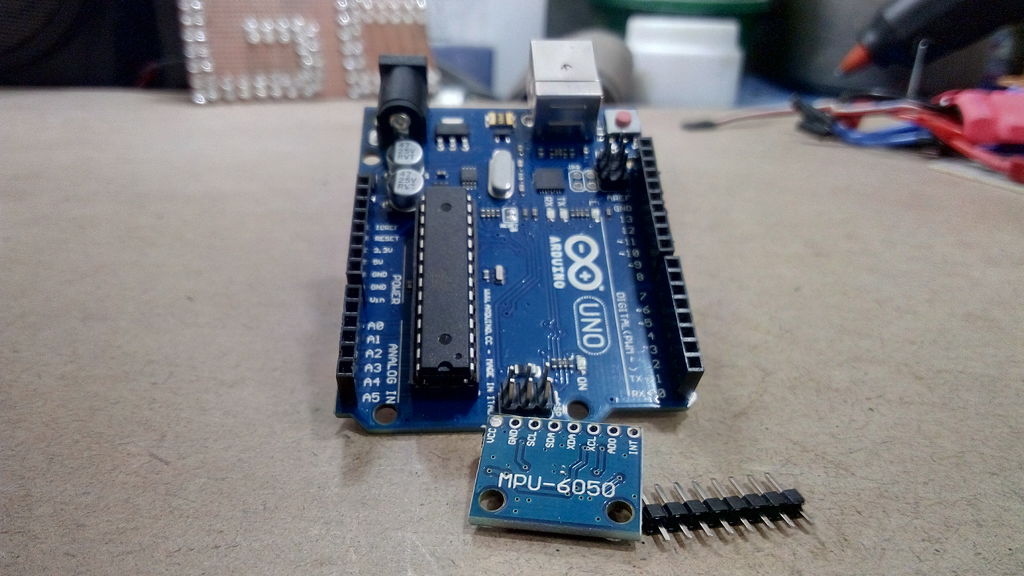
- - акселлерометр/гироскоп: плата MPU-6050 (дешевый и сердитый вариант типа "все в одном");
- - 3D принтер или доступ к нему для печати деталей конструкции квадрокоптера;
- - инструменты (в том числе паяльник и умение им пользоваться!).
Ссылки для заказа необходимого электронного оборудования, которое использовалось в проекте из Китая
3-D печать деталей квадрокоптера
Один из первых шагов - создание рамы нашего квадрокоптера. Было решено пойти по пути наименьшего сопротивления и напечатать раму на 3D принтере. Помимо простоты изготовления, каркас, напечатанный на 3D принтере, получается достаточно легкий благодаря печати "сотами". Детали были спроектированы в Solidworks. Ниже представлены все твердотельные модели. Все можете их спокойно скачать и отправлять на печать. Детали сохранены в формате .stl. Если хотите, можете их смело дорабатывать и изменять с использованием того же Solidworks. Модели параметрические, так что если вы решите использовать другие моторы, достаточно просто изменить несколько параметров в модели и вы получите готовый каркас под ваши габаритные размеры квадрокоптера.



В результате вы получите что-то вроде такого:


Настройка акселерометра-гироскопа (I2C)

1. Не подключайте к 5 В!
2. Рекомендуем использовать вот эту библиотеку для Arduino: Github.
В этом примере использовалась плата MPU6050 от SparkFun. На Amazon она стоит около $10, работает хорошо. Аналогичный Китай на Aliexpress или Ebay предлагает подобные платы по цене до 5 долларов. Тоже отлично работает.
Что такое I2C?
На простых платах акселерометра все логично и понятно: на ней предусмотрены отдельные аналоговые выходы для осей X, Y и Z. Каждый выход соответствует отдельной оси акселерометра. Если вы теперь взглянете на плату с I2C, поймете, что тут все несколько запутаннее. I2C - это стандарт обмена данными, при котором большие объемы информации передаются с помощью цифровых логических импульсов вместо аналоговых выходов. MPU6050 предоставляет вам 6 контролируемых осей (3 для гироскопа и 3 для акселерометра). Если бы они все были аналоговыми, нам пришлось бы задействовать все аналоговые порты на Arduino Uno. С протоколом I2C мы задействует гораздо меньше контактов для подключения.
Схема подключения Arduino
Схема подключения платы MPU6050 приведена ниже. Обратите внимание, что библиотека для Arduino предполагает использование именно этих контактов. Как правило, даже если у вас плата от другого производителя, контакты обозначены одинаково, следовательно, схема подключения остается такой же.
Если вы запитаете от 5 В, плата может испортиться, так что будьте внимательны и используйте именно 3.3 В. На некоторых платах MPU6050 есть регулятор напряжения, который выполняет роль предохранителя, но рисковать все равно не стоит. Если на вашей плате есть контакт AD0, его надо подключить к земле (GND). В нашем случае контакт VIO подключен к AD0 на самой плате, так что подключать пин AD0 не надо.
Скетч для Arduino
На этом этапе вам понадобятся некоторые знания в программировании Arduino. Если вы чего-то не понимаете, остановитесь на этом моменте и постарайтесь с ним разобраться. Приведенные ниже пояснения помогут вам со многими вопросами, но описать все возможные нюансы невозможно.
После того как вы подключили MPU-6050 к вашему Arduino, включите его и загрузите скетч I2C scanner code.
Скопируйте код программы, вставьте его в пустой скетч и запустите. Откройте серийный монитор Arduino IDE (Tools->Serial Monitor) и убедитесь, что вы подключены к 9600 (нижний левый).
Если вы все сделали правильно, должно обнаружиться устройство I2C и ему присвоиться адрес 0x68 ил 0x69. Запишите его. Если появились ошибки, проверьте подключение.
Теперь вам надо загрузить скетч, который обрабатывает информацию с акселерометра/гироскопа. По сети гуляет не один вариант подобных скетчей, рекомендуем использовать вот этот. После перехода по ссылке, нажмите “Download Zip”. После скачки, разархивируйте архив. Потом этого откройте Arduino IDE. Перейдите в sketch->import library -> add library. Вам надо будет добавить обе папки: I2Cdev и MPU6050.
Загрузите программу, откройте окно серийного монитора (в этот раз с 115200) и следуйте инструкциям. Поздравляю, так как сейчас вы должны были получить значения с акселерометра/гироскопа через Arduino!
Прежде чем двигаться дальше, надо откалибровать ваш гироскоп/акселерометр. Найдите плоскую горизонтальную поверхность и поставьте на нее плату MPU6050.
Теперь запустите скетч для калибровки, который можно скачать здесь: MPU6050_calibration.ino (опять-таки, по умолчанию установлен порт 0x68, но вы можете его изменить). Запишите данные отклонений (offset), которые вы получите. Эти данные вы будете использовать в скетче MPU6050_DMP6 (и в дальнейшей программе для квадрокоптера).
Теперь у вас есть рабочий, безусловно полезный, акселерометр/гироскоп.
Подключение к Arduino
Подключение акселерометра мы рассмотрели. Следующий шаг - заставить Arduino управлять моторами. Плата Arduino предоставляет на выход небольшое значение силы тока и напряжения, так что вместо того, чтобы подключать моторы напрямую к цифровым выходам платы, мы используем транзисторы для "усиления" напряжения.
Начнем сборку электросхемы. На этом этапе нам понадобятся Arduino, моторы, транзисторы (монтажная плата и коннекторы). Схема подключения приведена ниже, под необходимыми текстовыми пояснениями. Подключите четыре ШИМ выхода (отмечены на Arduino знаком
) к транзистору, как это показано на рисунках. После этого подключите коннекторы к моторам, которые подключены к источнику питания. В приведенном проекте квадрокоптера использовался источник питания 5 В, но должна подойти и батарея 3-5 В.
Убедитесь, что транзисторы заземлены, и земля на Arduino подключена к земле от источника питания. Убедитесь, что роторы двигателей вращаются в правильном направлении (они должны обеспечивать подъем квадрокоптера, а не крен). Если вы переключите контакт мотора с 5 В на транзистор, ротор двигателя начнет вращаться в противоположном направлении. После настройки изменять направление вращение двигателей больше не придется. Изменять мы будем только скорость.
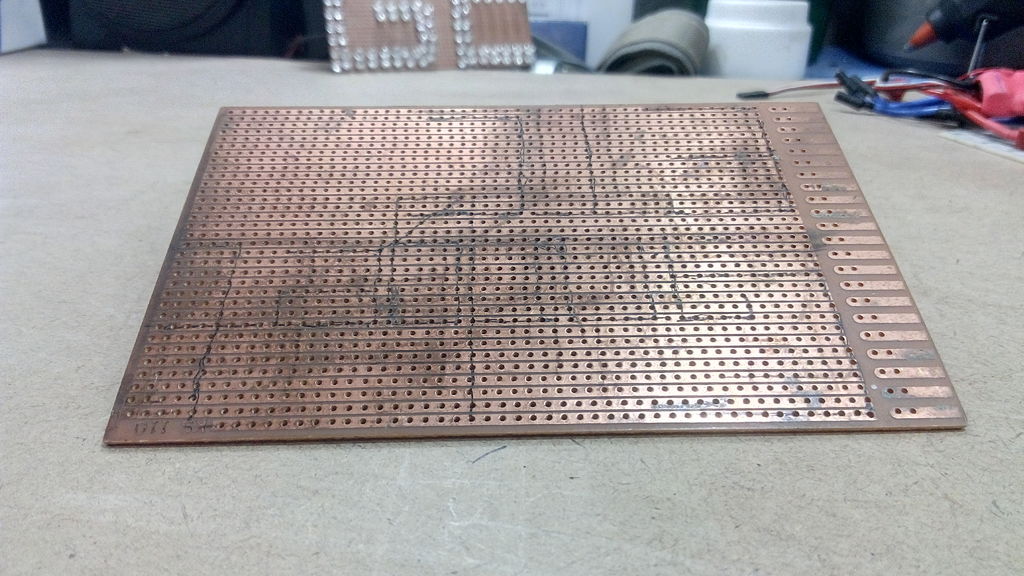
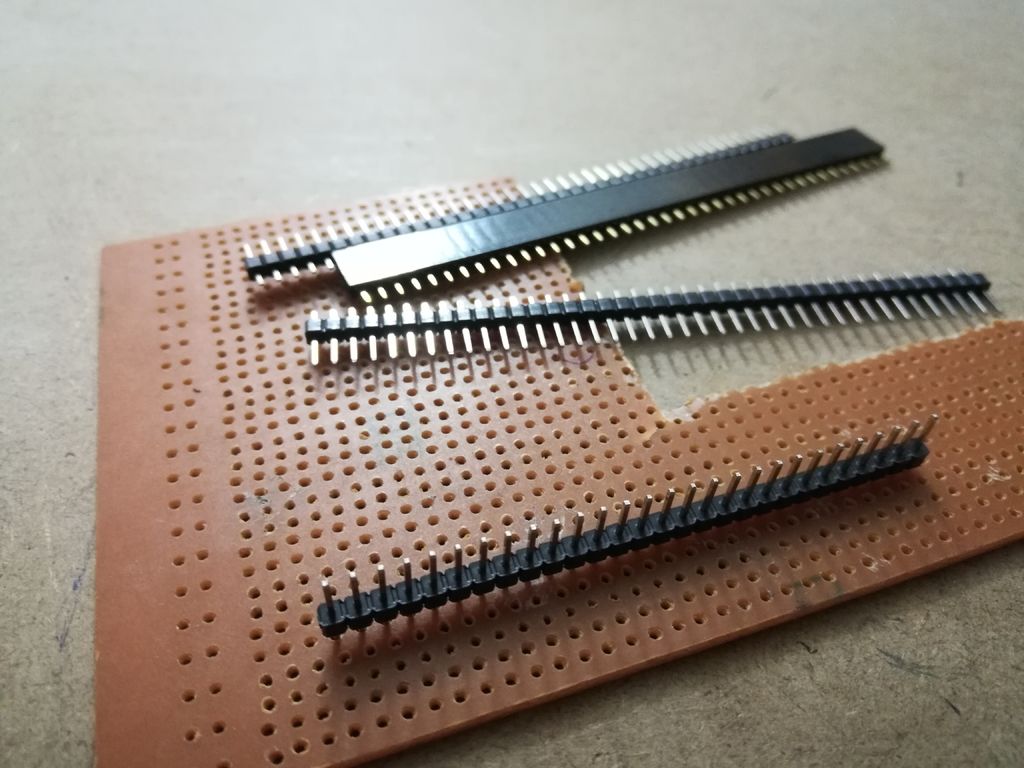
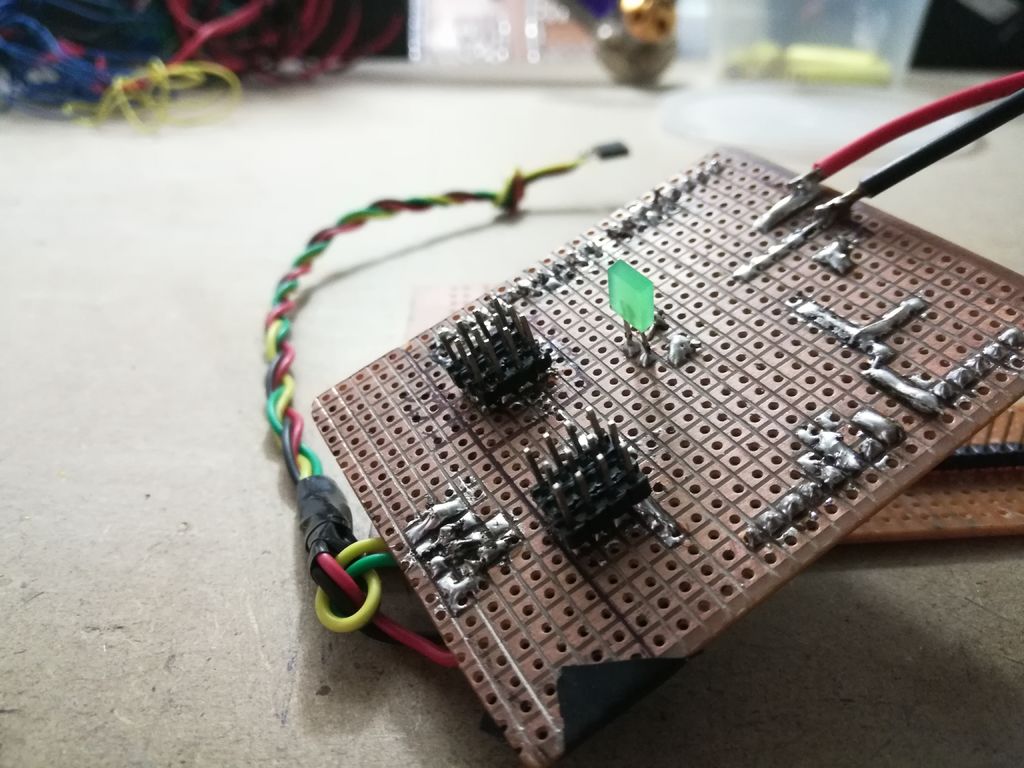
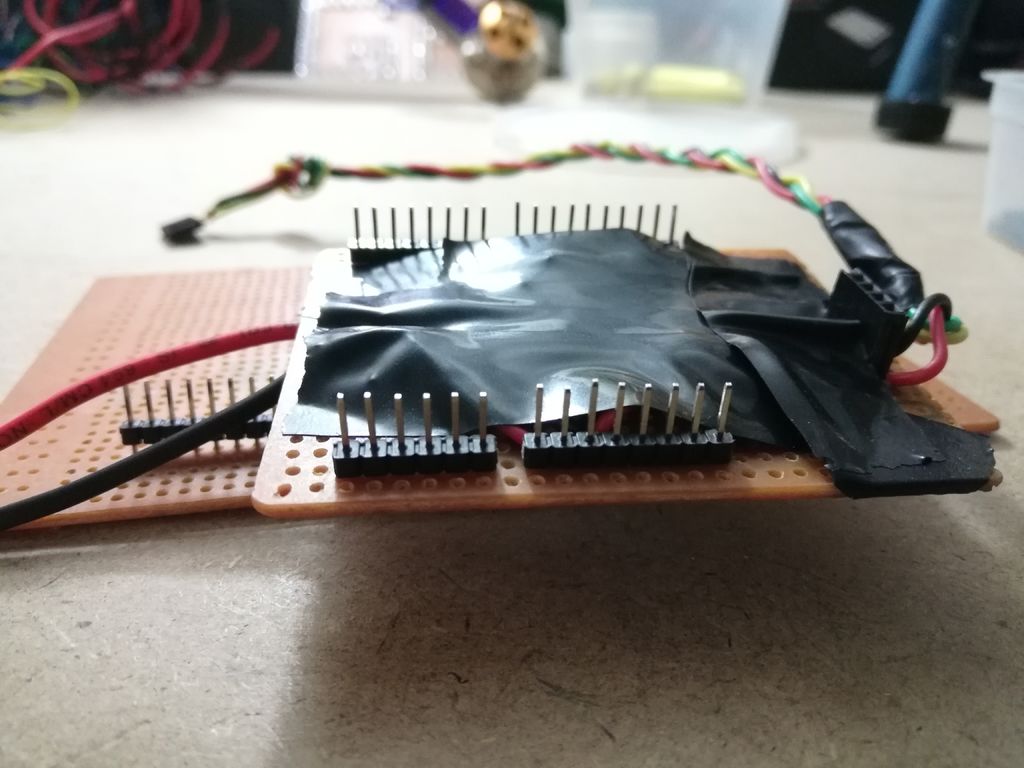
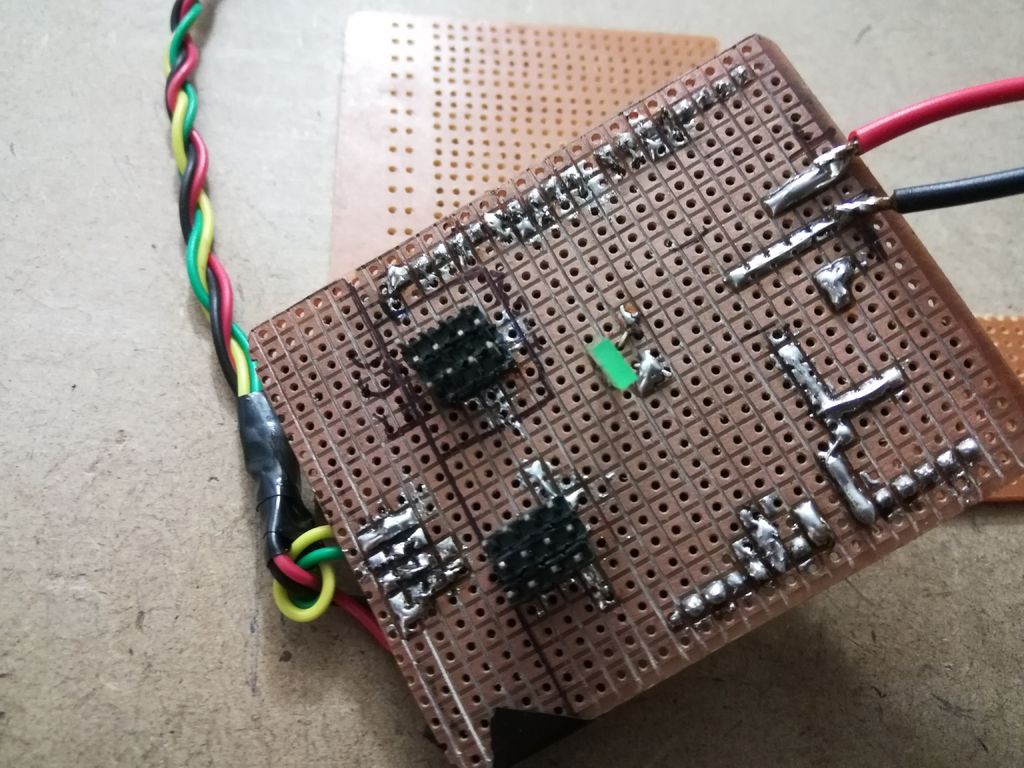
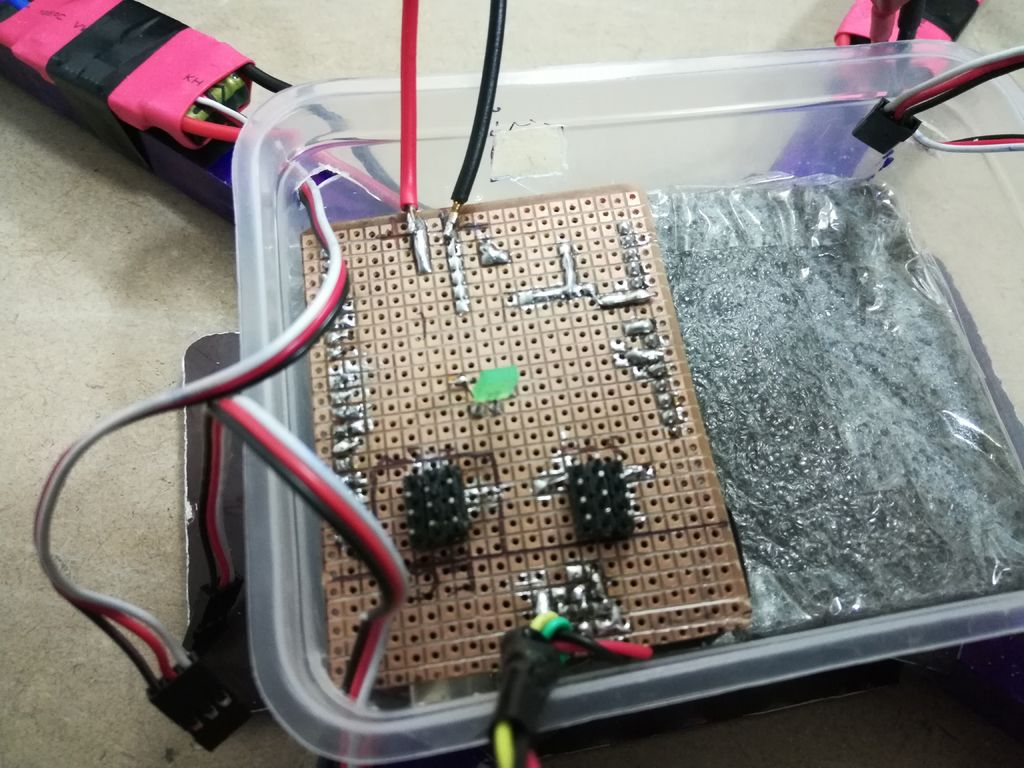
После запуска акселерометра и его проверки, необходимо установить все на ProtoBoard (можно использовать монтажную плату, на которую напаять рельсы для установки на Arduino. Можно пойти по более элегантному пути и приобрести Proto Shield). Не стоит припаивать транзистор на плату для прототипирования. Лучше использовать для него сокет с контактами, чтобы вы могли его в любой момент заменить.
В нашем случае мы припаяли акселерометр к плате и только после этого провели калибровку. Но практика показывает, что это не совсем правильно. Для увеличения точности показаний гироскопа/акселерометра, его лучше сначала откалибровать на ровной поверхности и только потом припаять.








Программа для Arduino
Программа, которая выложена здесь, стабилизирует квадрокоптер и позволяет ему зависнуть в стабильном состоянии. Программа является основой для дальнейшего управления и перемещения квадрокоптера. Помимо основной программы вам надо будет скачать библиотеку Arduino PID по этой ссылке.

Можете почитать по поводу ПИД-регулирования на Вики, если вы не знакомы с этими регуляторами. PID класс для Arduino использует три входа: заданное положение, измерение и выход. Выход зависит от текущего положения и измерений. ПИД-регулятор старается изменить выход таким образом, чтобы измерения соответствовали заданному положению. В алгоритме используется интересная математика. Алгоритм ПИД-регулирования старается отработать таким образом, чтобы значения оставались максимально стабильными.
В нашем алгоритме для стабилизации используется два ПИД-контроллера: один для тангажа и другой для крена. Разница в скорости вращения пропеллеров 1 и 2 будет такой же как и разница в скорости пропеллеров 3 и 4. Аналогично для пар 1,3 и 2,4. После этого ПИД-регулятор изменяет разницу в скорости, выводя тангаж и крен в нуль.
Не забудьте проверить какие цифровые пины с Arduino идут к моторам и соответственно изменить скетч.
Дальнейшая модернизация квадрокоптера на Arduino

Основные проблемы с маленьким квадрокоптером - его стоимость и вес. Можете поискать моторы побольше и помощнее, но это особо не улучшит его характеристики. Что вам действительно поможет, (если вы готовы отдать больше денег) - это безщеточные (вентильные) моторы. По характеристикам они на порядок лучше, но в довеску к ним надо использовать контроллеры скорости, что сделает квадрокоптер дороже.
Для уменьшения веса конструкции лучше всего использовать именно Arduino Uno, так как к этой модели контроллера можно снять "прошитый" чип микропроцессора и установить его непосредственно на вашу ProtoBoard. В результате вы выиграете около 30 грамм веса, что немало при таких масштабах. Дополнительно вам надо будет использовать еще несколько конденсаторов и т.п. Или, как альтернативный вариант, можно использовать Arduino Pro Mini.
Программа для Arduino, которая написана и представлена в предыдущем разделе, может быть легко расширена и обогащена дополнительным функционалом. Самое главное, что на этом этапе квадрокоптер уже может автоматически стабилизировать полет. Если вы хотите настроить дистанционное управление, можете посмотреть в сторону трансмиттеров/ресиверов или bluetooth модулей. В общем, основа у вас теперь есть, а пространства для дальнейшей модернизации - еще больше.
Оставляйте Ваши комментарии, вопросы и делитесь личным опытом ниже. В дискуссии часто рождаются новые идеи и проекты!
Необходимые детали и узлы
Прежде чем приступить к сборке квадрокоптера своими руками, необходимо обзавестись всеми необходимыми деталями. Мозгом нашей самоделки станет полетный контроллер Arduino Uno. Его возможностей более чем достаточно для того, чтобы управлять беспилотником.

Помимо микроконтроллера, нам понадобятся:
- Аккумулятор (лучше несколько) на 3.7В
- Плата MPU-6050 (на ней установлены гироскоп и акселерометр)
- Транзистор ULN2003A
- Коллекторные двигатели с полым ротором 0820
- Провода
Необходимо сделать несколько замечаний. Так как мы собираем дешевый самодельный дрон, то наш выбор пал на коллекторные движки с полым ротором (так называемые coreless motors). Они далеко не так надежны, как бесколлекторные двигатели, но зато гораздо дешевле стоят. Кроме того, можно обойтись без дополнительных контроллеров скорости.
Зато невозможно обойтись без гироскопа и акселерометра. Гироскоп необходим для того, чтобы квадрокоптер мог удерживать заданное направление движения, тогда как акселерометр используется для измерения ускорения. Без этих устройств управлять коптером было бы гораздо сложнее (если вообще возможно), так как именно они предоставляют данные для сигнала, регулирующего скорость вращения винтов.
Мы не указали в списке необходимых деталей раму. Ее можно приобрести, а можно распечатать на 3D принтере каркас, лучи и крепления для двигателей. Второй вариант нам кажется более предпочтительным, тем более, что в интернете можно без труда найти проекты квадрокоптера.
Распечатанная на принтере рама окажется не только легкой, но и прочной. Но если доступа к 3D принтеру нет, раму можно заказать.
Пошаговая инструкция по сборке
Как напечатать раму и крепеж
3D принтеры можно найти во многих университетах, лабораториях, коворкингах. Зачастую доступ к ним бесплатный. Модели для печати можно создать самостоятельно, используя для этого, например, Solidworks. А можно воспользоваться уже готовыми решениями, при необходимости изменив параметры.
Как настроить акселерометр гироскопа
Для настройки акселерометра-гироскопа (I2C)мы рекомендуем использовать следующую библиотеку. Ни в коем случае не подключайте плату к напряжению 5В, иначе вы моментально ее испортите.

Вкратце расскажем, чем интересна плата I2C с датчиками. Она заметно отличается от обычной платы акселерометра с тремя аналоговыми выходами для осей X, Y, Z. I2C представляет собой интерфейсную шину, обеспечивающую передачу значительных объемов данных через логические цифровые импульсы.
Аналоговых выходов на плате не много, и в этом большой плюс I2C, ведь в противном случае нам бы пришлось использовать все порты на Arduino, чтобы получить данные от гироскопа и акселерометра.
Схема подключения к Arduino
Прежде чем плата I2C сможет обмениваться данными с Arduino, ее необходимо подключить к контроллеру.

Схема следующая:
- VDD -3.3v
- GND — GND
- INT- digital 2
- SCL — A5
- SDA — A4
- VIO – GND
Еще раз обращаем внимание на то, что для питания необходимо использовать необходимо именно 3.3В. Подключение платы к 5В скорее всего приведет к ее поломке (спасти может только регулятор напряжения, но он далеко не всегда присутствует на плате).
Если на плате присутствует контакт AD0, он подключается к земле (GND).
В библиотеке, на которую мы дали ссылку выше, используются перечисленные каналы.
Скетч для Arduino
Преимуществом выбранного для сборки дрона микроконтроллера является относительная простота работы с ним. Вам не придется читать специальные книги, документы и техническую документацию. Достаточно знать основы программирования Arduino, которые, как вы сейчас убедитесь, не так сложны.

Подсоединив плату MPU-6050 к контроллеру, включите его и перейдите по ссылке.
Нас интересует скетч I2C scanner code, вернее, его код.
Скопируйте программный код, вставьте в пустой скетч, после чего запустите его. Убедитесь, что подключение установлено к 9600 (для этого запустите Arduino IDE через Tools-Serial Monitor). Должно появиться устройство I2C с адресом 0×68 либо 0×69. Запишите или запомните адрес. Если же адрес не присвоился, скорее всего проблема в подключении к электронике Arduino.
Затем нам понадобится скетч, умеющий обрабатывать данные гироскопа и акселерометра. В интернете есть множество вариантов, и найти подходящий не проблема. Скорее всего, он будет в заархивированном виде. Разархивируйте скачанный архив, отройте Arduino IDE и добавьте библиотеку (sketch-import library-add library). Нам понадобятся папки MPU6050 и I2Cdev.
Загружаем программу, открываем окно монитора через 115200 и просто следуем инструкции. Через несколько мгновений вы получите данные с гироскопа/акселерометра. Затем следует провести калибровку датчиков.
Установите плату на ровную поверхность и запустите скетч MPU6050_calibration.ino (легко ищется в интернете). Просмотрите код, по умолчанию в нем указан адрес 0×68. После запуска программы у вас появится информация по отклонениям (offset). Запишите ее, она нам понадобится в скетче MPU6050_DMP6.
Все, вы получили функционирующие гироскоп и акселерометр.
Программа для Arduino
По ссылке вы сможете скачать программу для Arduino, с помощью которой коптер будет стабилизирован в полете и сможет зависнуть над землей. В дополнение к программе обязательно скачайте библиотеку с Arduino PID по ссылке.
Программа поможет вам управлять дроном. Алгоритм, используемый для стабилизации, основан на двух PID-контроллерах. Один предназначен для крена, другой – для тангажа.
Разница в скоростях вращения пары винтов 1 и 2 равна разнице в скоростях пары винтов 3 и 4. Тоже самое справедливо и для пар 1, 3 и 2, 4. PID-регулятор производит изменение разницы в скорости, после чего крен и тангаж становятся равными нулю.
Обратите внимание на цифровые пины Arduino для моторов и не забудьте изменить скетч.
Подключение к контроллеру
Для того, чтобы управлять коптером, нам необходимо получить контроль над моторами, подключив их к Arduino. Контроллер дает на выходе лишь небольшое напряжение и силу тока, поэтому подключение двигателей напрямую лишено смысла. Вместо этого можно поставить несколько транзисторов, позволяющих увеличить напряжение.

Для составления схемы нам необходимы:
- Arduino
- Двигатели
- Транзисторы
Все это собирается на монтажной плате и соединяется коннекторами.
На первом этапе следует подсоединить 4 ШИМ выхода (обозначены
) к транзистору. Затем подсоедините коннекторы к движкам, подключенным к питанию. В нашем случае мы используем аккумулятор на 5В, но подойдет и аккумулятор на 3-5В.
Транзисторы должны быть заземлены, а земля на плате Arduino должна быть подключена к земле аккумулятора. Двигатели должны вращаться в правильном направлении, то есть работать на подъем коптера, а не на его крен.
Переключив контакт двигателя с напряжения 5В на транзистор, вы увидите, что ротор изменит направление вращения. Единожды совершив настройку, больше возвращаться к изменению направления вращения ротора не придется. Теперь нас интересует скорость.
Запустив и проверив акселерометр, мы устанавливаем нашу схему на ProtoBoard. За ее неимением, можно использовать и обычную монтажную плату, предварительно напаяв на ней рельсы для контроллера.
Перед тем, как припаивать акселерометр к плате, необходимо выполнить его калибровку на горизонтальной поверхности. Это поможет добиться более точной работы сенсора в будущем.
Как еще можно модернизировать квадрик
Узким местом коптера являются его коллекторные движки. Если поискать, можно найти чуть более крупные и более мощные моторы, чем предложены в нашей статье, но значительного выигрыша в характеристиках не произойдет.

Впрочем, у нас была цель собрать недорогой квадрокоптер своими руками, и именно поэтому использовались дешевые моторы. Бесколлекторные двигатели заметно дороже, но зато они дадут вам заметно большую мощность и надежность. К ним придется докупить еще и контроллеры скорости, но это действительно эффективная модернизация.
Выбор платы Arduino Uno обусловлен тем, что с нее можно довольно легко снять чип и поставить его на ProtoBoard. Это позволяет уменьшить вес дрона на 30 грамм, но придется включить в схему дополнительные конденсаторы. Подойдет и плата Arduino Pro Mini.
Что касается программы Arduino, то ее можно сравнительно легко изменить и дополнить новыми функциями. Главное, что с ее помощью дрон способен в автоматическом режиме стабилизовать свое положение.
На квадрокоптер могут быть установлены дополнительные модули, например, плата приемника, что позволит организовать дистанционное управление дроном.
На этом мы завершаем статью о создании беспилотника на Arduino. Подписывайтесь на наши обзоры и делитесь полезными материалами в социальных сетях. До новых встреч.

Рама состоит из алюминиевой антенны (штанги), лопасти вентилятора из алюминиевого плафона и дерева. Arduino UNO наряду с MPU6050 (гироскоп + Accle) используется в качестве контроллера полёта.
Шаг 1: Материалы












Это материалы, которые используются для моего дрона. Вы можете использовать любые детали / материалы по вашему усмотрению. Если вы хотите сделать его максимально дешевым, то можете воспользоваться списком материалов ниже.
Ссылки на Амазон:
Список со ссылками на banggood:
Ссылки на gearbest:
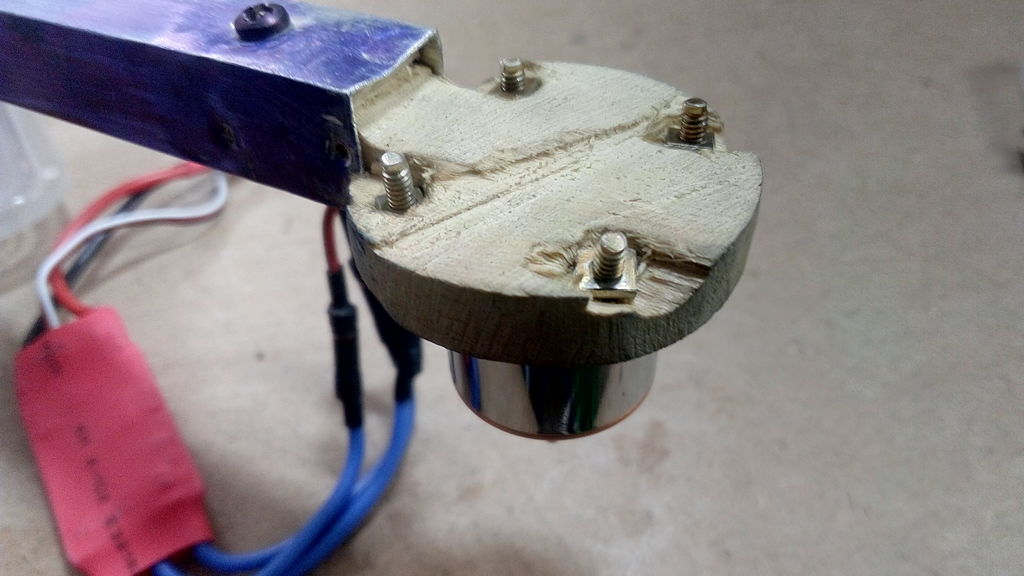
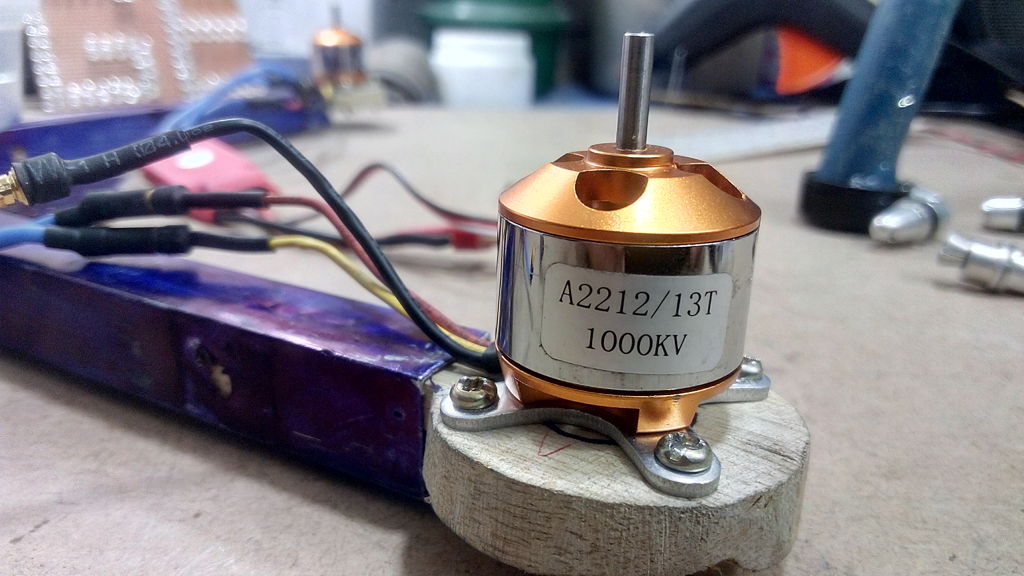
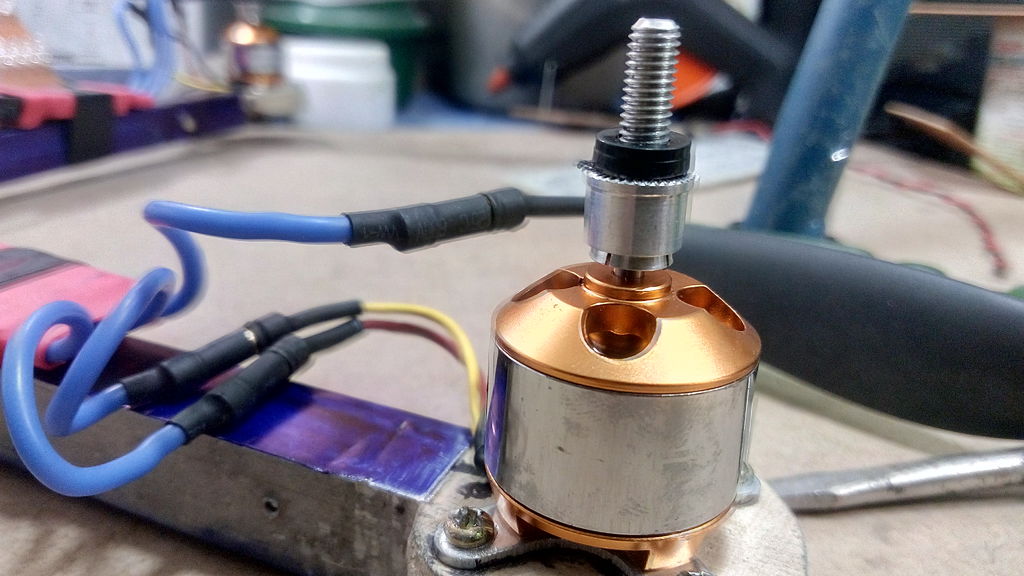
Шаг 2: Установка моторов





Когда вы покупаете моторы, крепление мотора и несколько винтов входят в комплект. Крепление алюминиевого мотора с винтами идет с ним. (см. рисунок). Установите его на двигатель, используя винты.
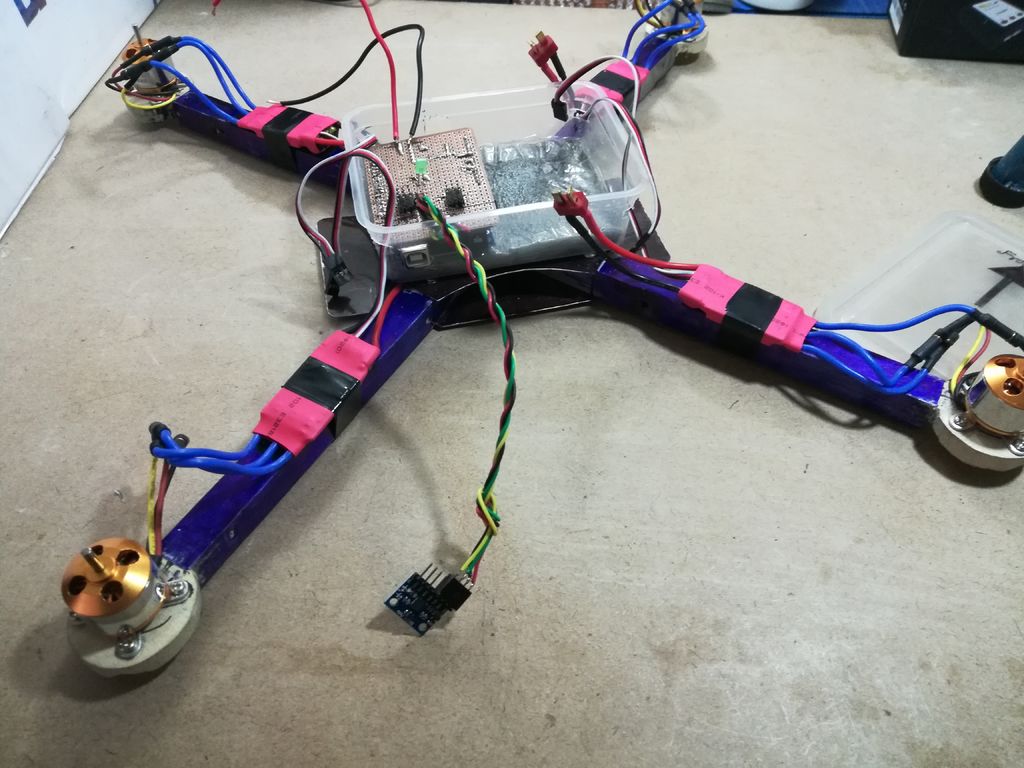
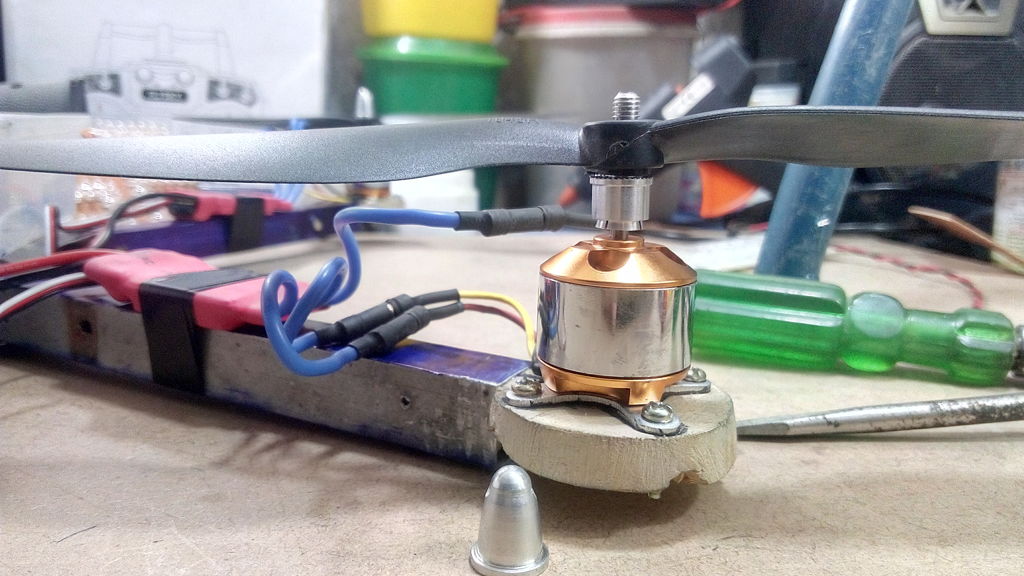
Шаг 3: Делаем раму

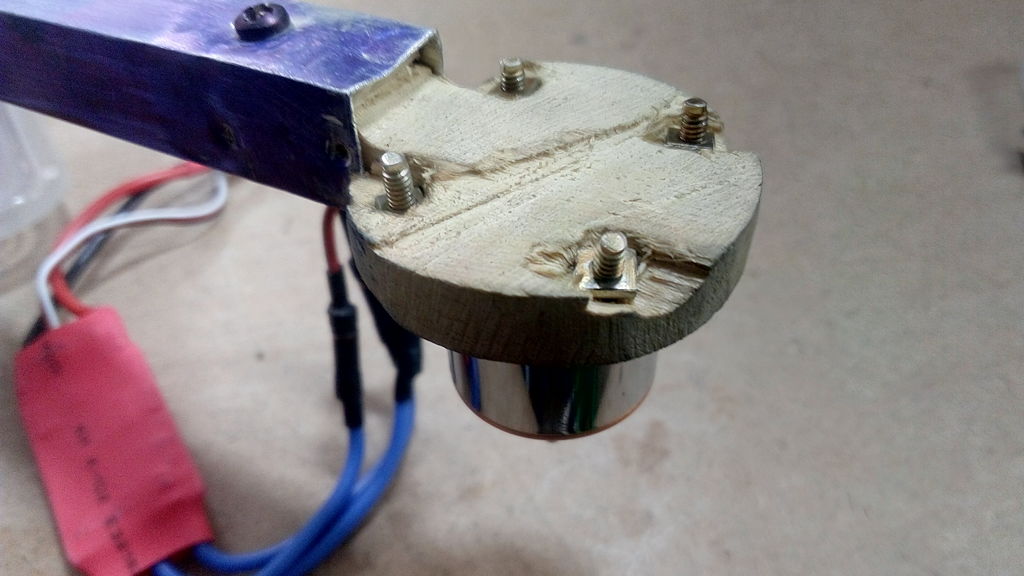




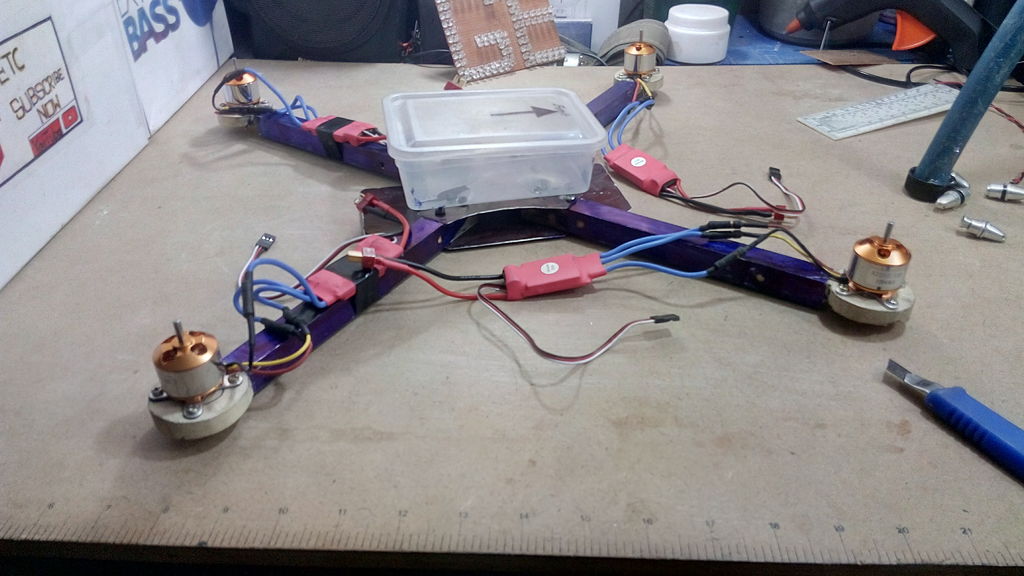
Я использую старую алюминиевую антенну, мягкое дерево и алюминиевую пластину (лопасть вентилятора), чтобы сделать каркас. Отрежьте 4 куска алюминиевого бруска по 20см. Размер центральной пластины составляет около 11 * 18 см…. Деревянное крепление для двигателя имеет длину около 10 см и диаметр 4,5 см (там, где установлен двигатель).
Закрепите алюминиевые стержни с помощью центральной пластины с помощью винтов и вставьте крепление двигателя под алюминиевые стержни. Ваша рама готова (см. видео).
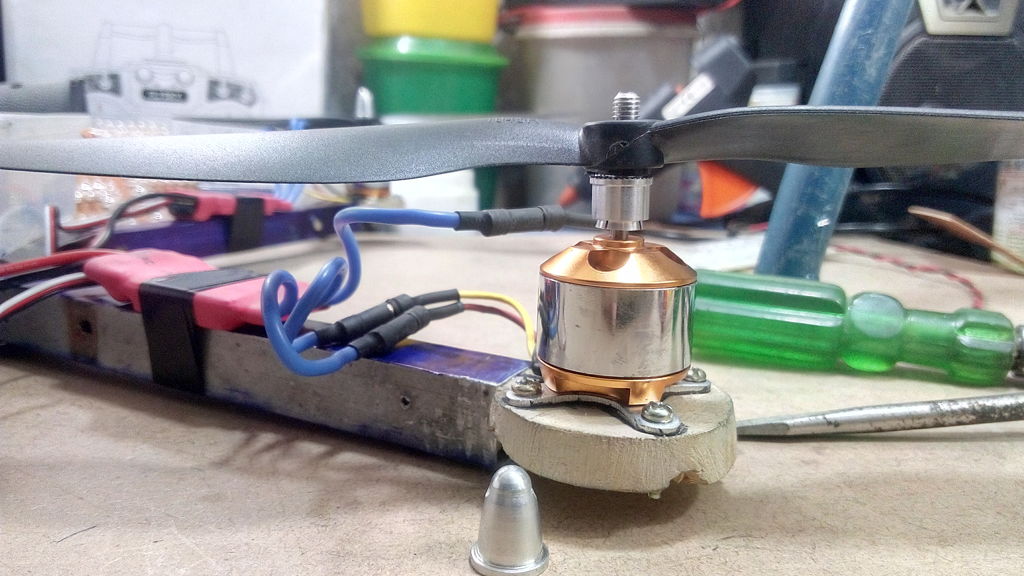
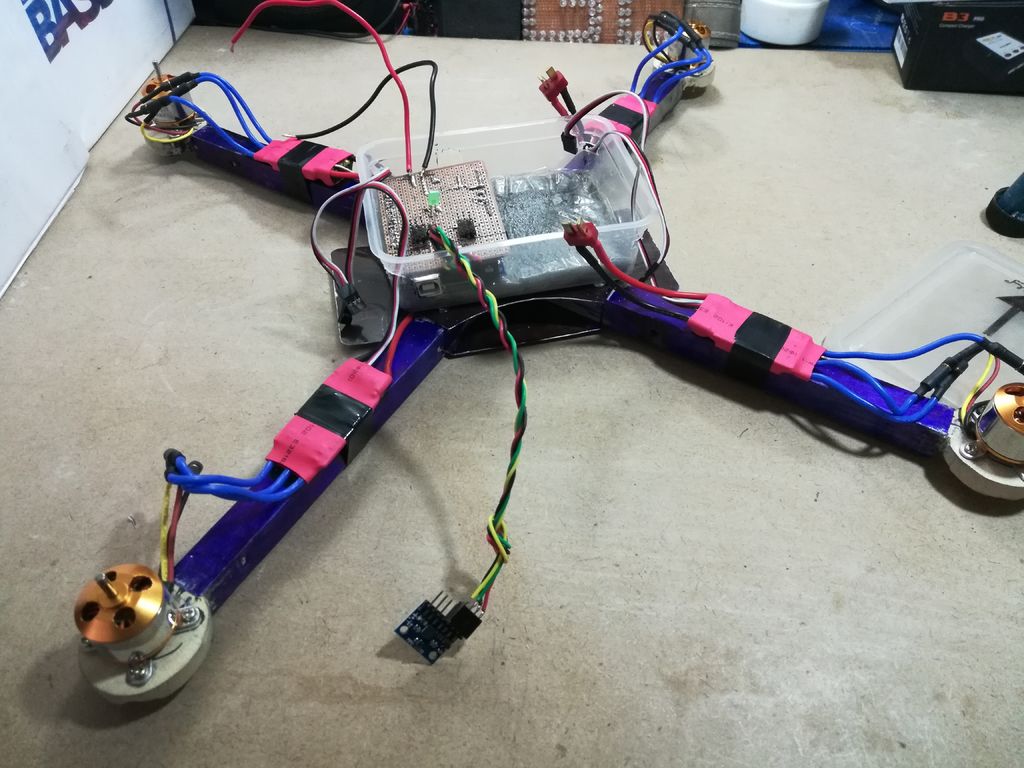
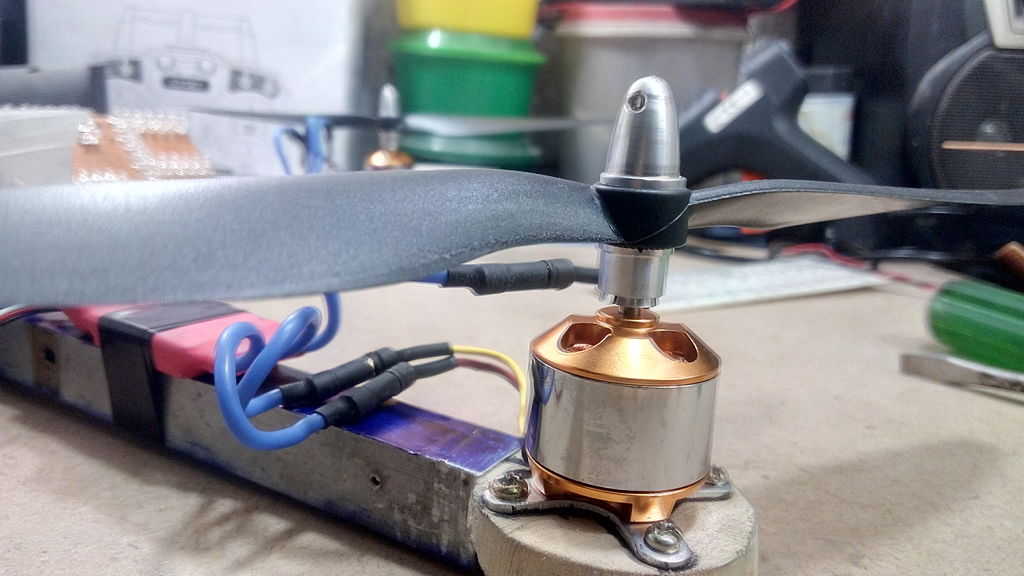
Шаг 4: Устанавливаем все компоненты (ESC и моторы на раму)



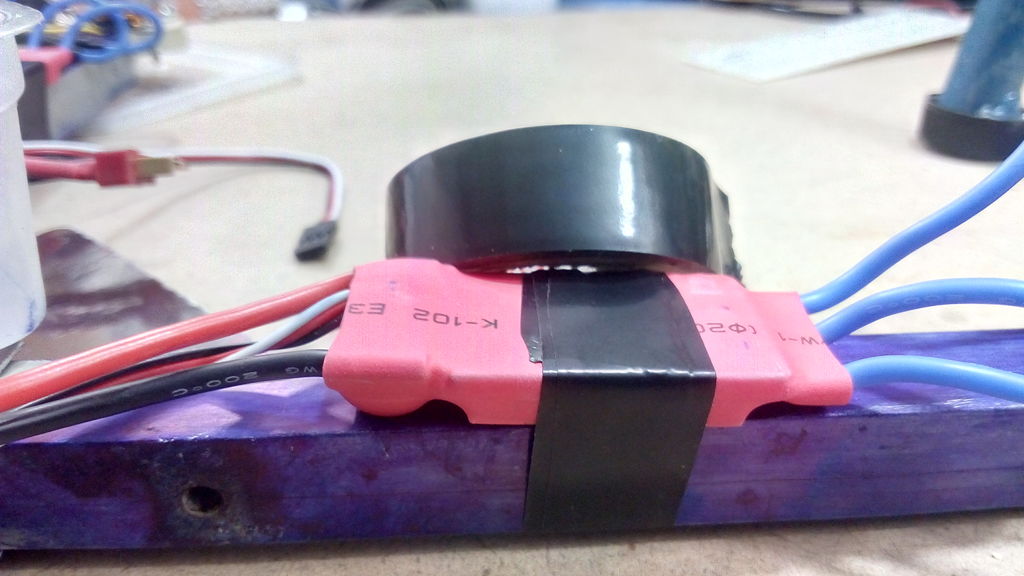
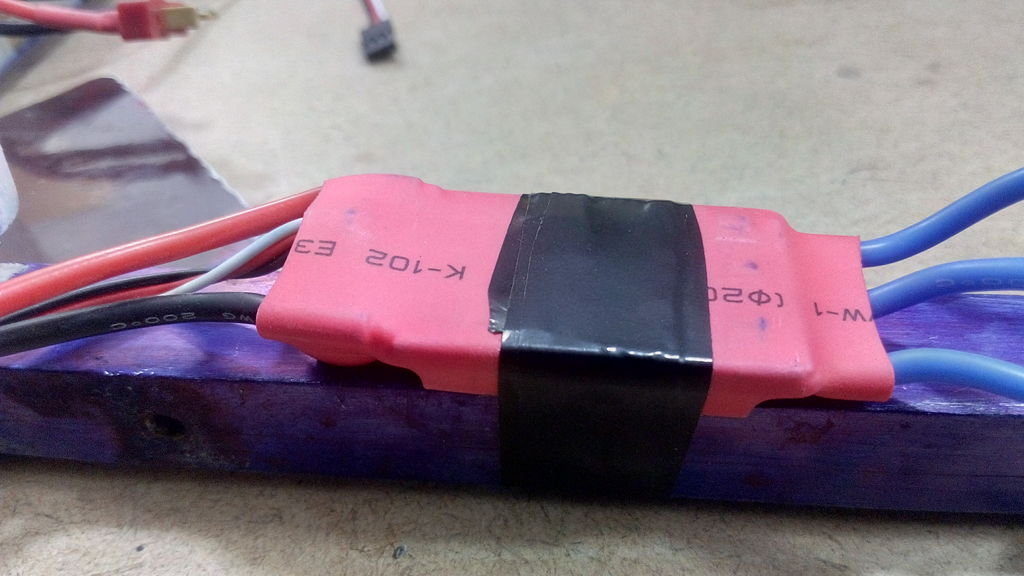
Теперь прикрепите моторы к деревянному креплению с помощью винтов и гаек (любых типов) и соедините с ними провод ESC (произвольно), зафиксируйте ESC с помощью изоленты или стяжек, в моем случае это изолента (дешевле, чем стяжки). После подключения всех моторов и ESC отрежьте провода ESC +ve и –ve и подключите все ESC с помощью проводов или PDB. Я использую провода, потому что в моей раме нет места для ESC. Всё готово.
Шаг 5: Контроллер полёта

На основе Ардуино Уно и MPU6050, создайте контроллер полёта.
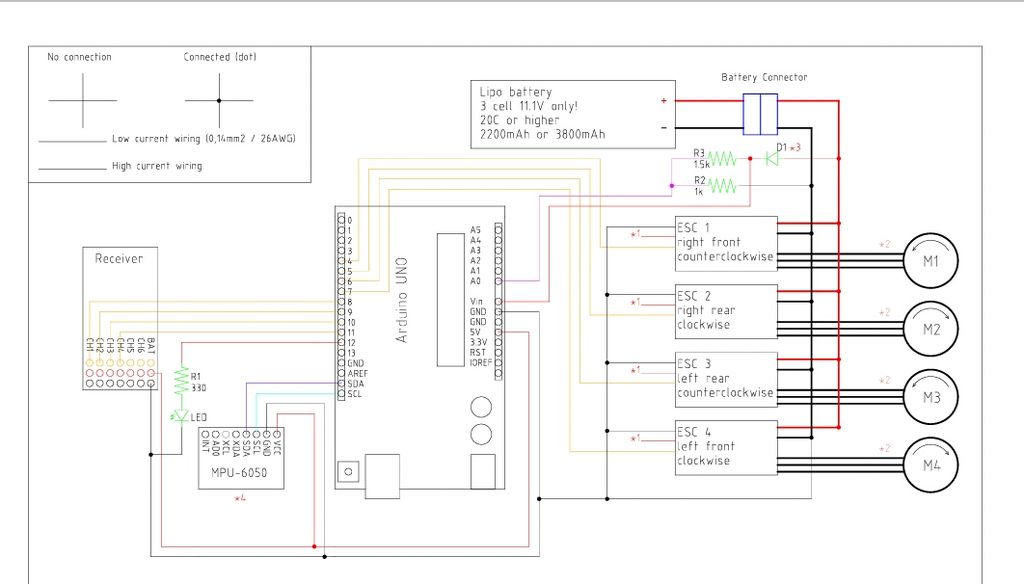
Мой контроллер основан на Joop Brokking’s YMFC-AL и его автоуровневом квадрокоптере. Соедините все согласно диаграмме.
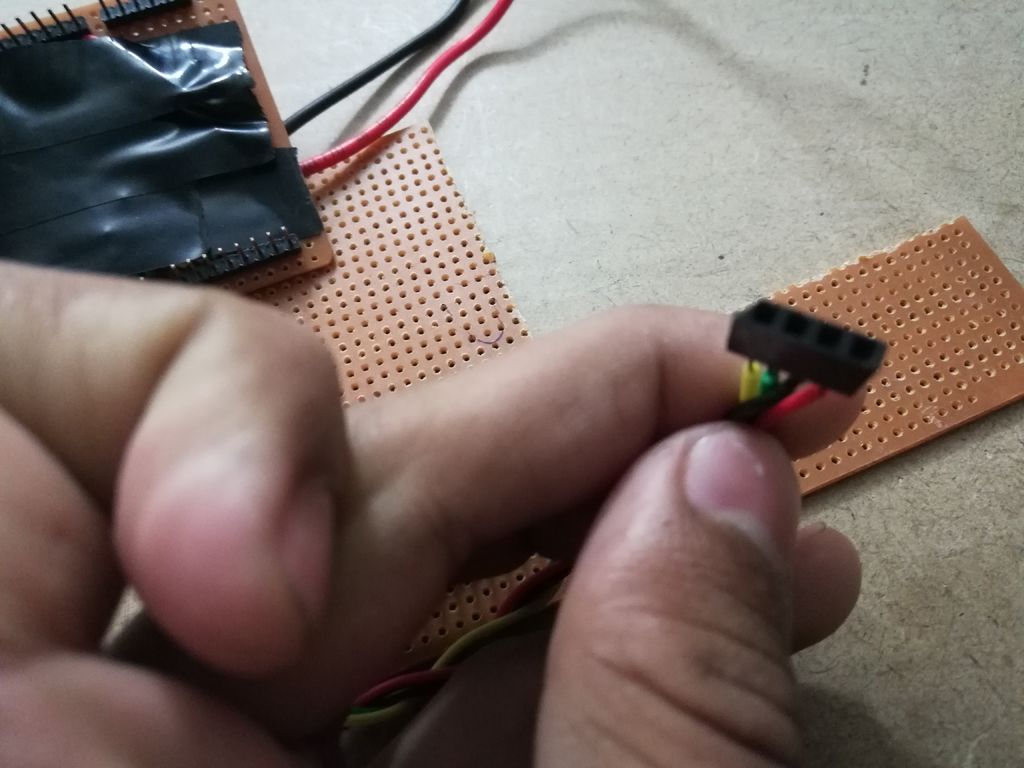
Шаг 6: Соединяем ESC и ресивер с контроллером полёта
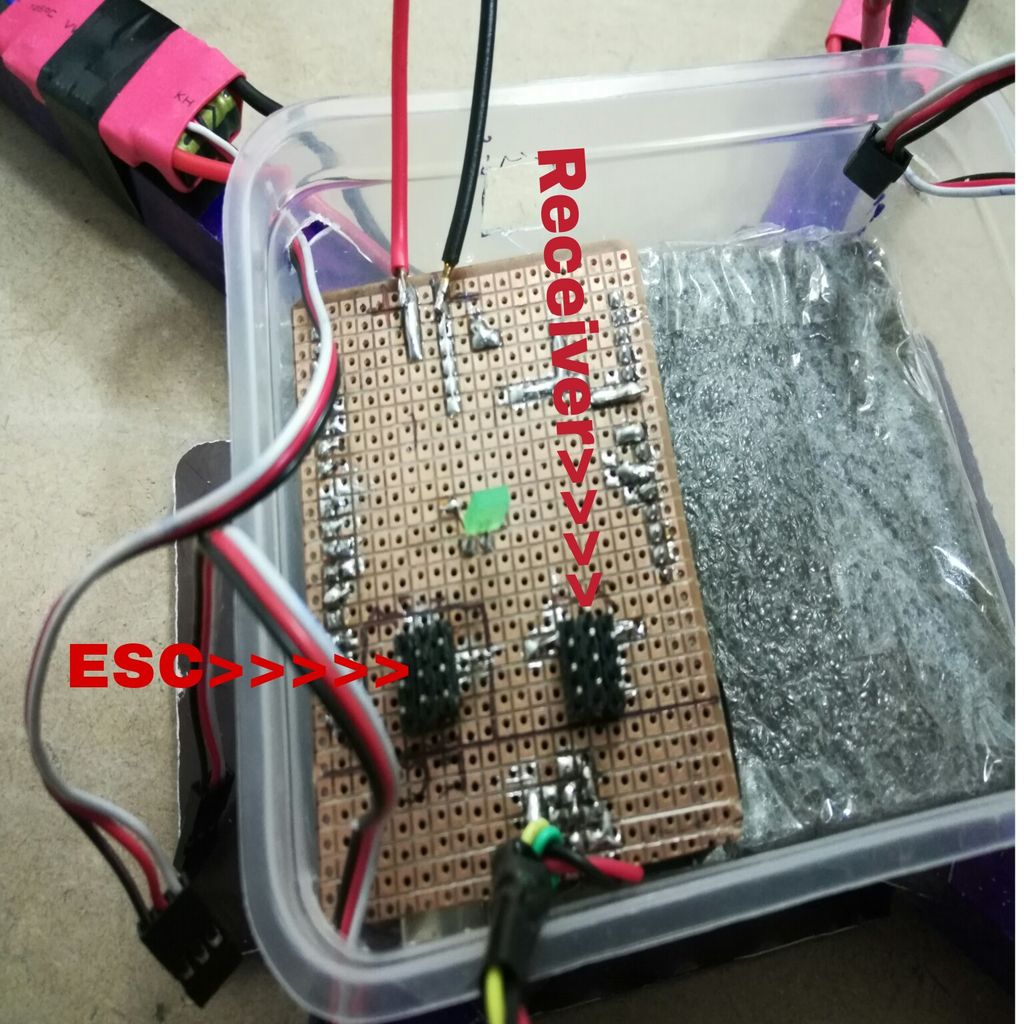
*** Не соединяйте BEC-провод ESC (5 вольт), соединяйте лишь сигнальный провод
*** Запитывайте ресивер от 5вольтового источника Ардуино
- Цифровой пин-4 к ESC1 (правый передний CCW)
- Цифровой пин-5 к ESC2 (правый задний CW)
- Цифровой пин-6 к ESC3 (левый задний CCW)
- Цифровой пин-7 к ESC4 (левый передний CW)
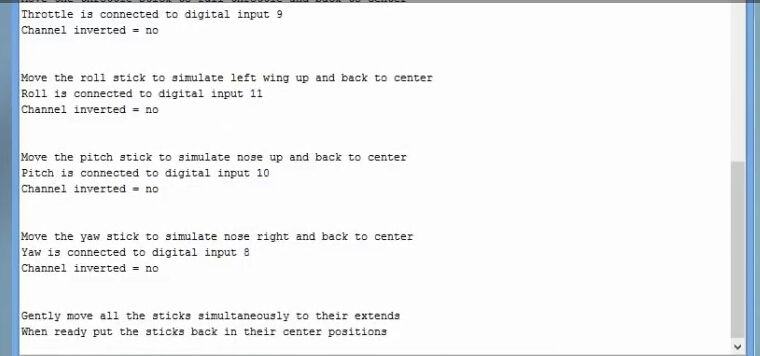
- Цифровой пин-8 к каналу 1 ресивера
- Цифровой пин-9 к каналу 2 ресивера
- Цифровой пин-10 к каналу 3 ресивера
- Цифровой пин-11 к каналу 4 ресивера
Шаг 7: Настройка контроллера полёта (загрузка скетча)



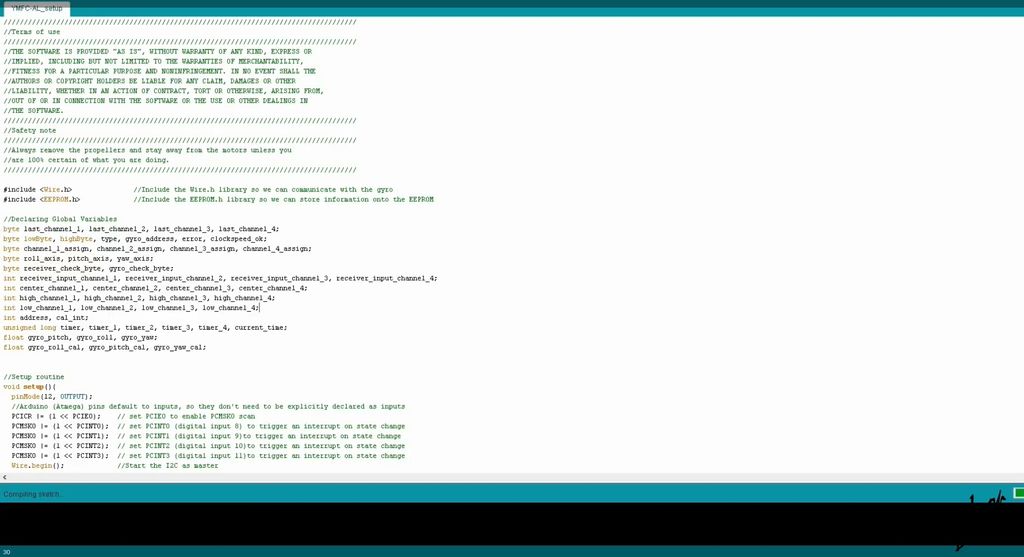
*** На этом этапе не подключайте лётную батарею
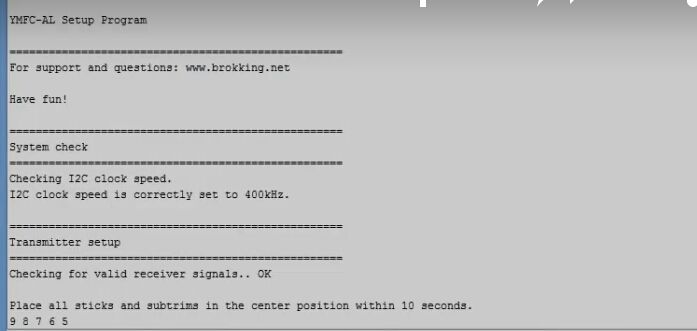
Теперь загрузите Arduino IDE и приложенный скетч и извлеките файл. Вы найдете схемы YMFC-Al, файл Readme, код калибровки ESC, код настройки и код контроллера полета.
Сначала загрузите код и откройте последовательный монитор на 56000b и следуйте инструкциям в видео
Если ошибки не возникло, загрузите скетч калибровки ESC после загрузки кода. Поставьте передатчик на полную мощность и подключите летную батарею после нескольких звуковых сигналов, выключите дроссель (я думаю, что этот метод работает не для всех типов и марок ESC, но у меня это работает отлично).
После загрузки скетча калибровки ESC загрузите скетч контроллера полета и Ваш FC готов.
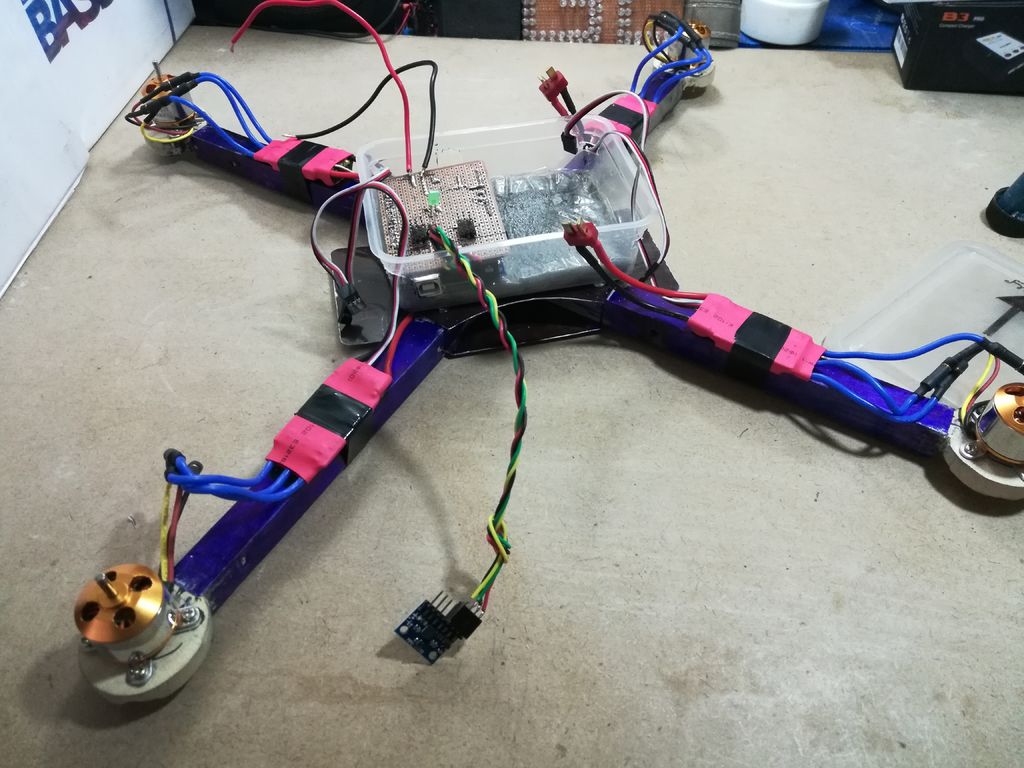
Шаг 8: Установка электроники в кейс и монтаж

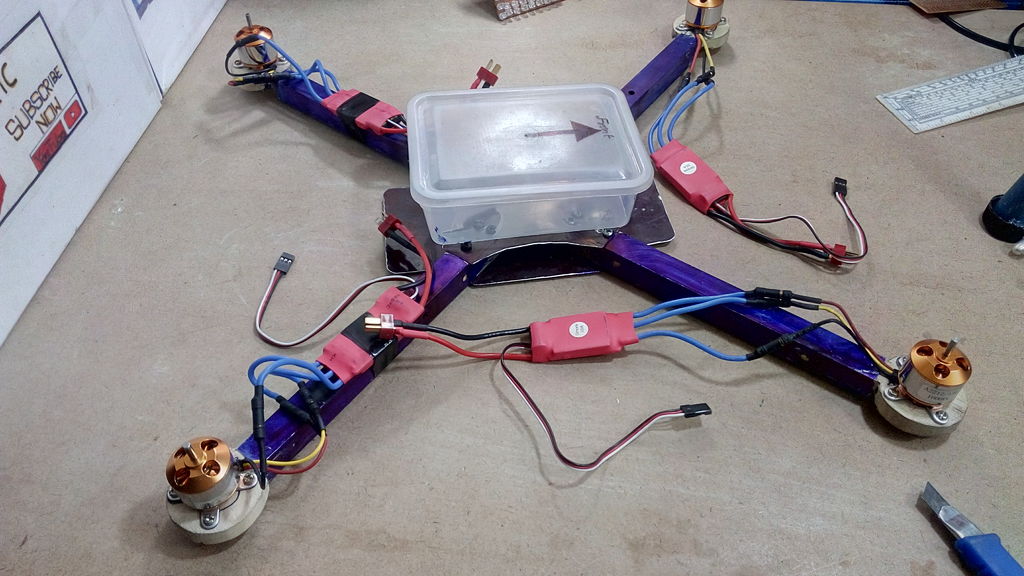






После завершения всех работ по соединению электрокомпонентов, положите всю электронику в коробку и завершите всю проводку. Теперь установите винты CCW на двигатели CCW и винты CW на двигатели CW. Вы готовы к полету.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Теперь, когда вы выбрали или спроектировали раму БПЛА, выбрали моторы, несущие винты, ESC и батарею, можно приступить к выбору полётного контроллера. Полётный контроллер для мультироторного беспилотного летательного аппарата представляет собой интегральную схему, обычно состоящую из микропроцессора, датчиков и входных/выходных контактов. После распаковки контроллер полёта не знает какой конкретный тип или конфигурацию БПЛА вы используете, поэтому изначально необходимо будет установить определенные параметры в программном обеспечении, после чего заданная конфигурация загружается на борт. Вместо того, чтобы просто сравнивать доступные в настоящее время полётные контроллеры, подход, который мы здесь использовали, перечисляет, какие элементы ПК отвечают за какие функции, а также аспекты, на которые необходимо обратить внимание.
Основной процессор

8051 vs AVR vs PIC vs ARM: Семейство микроконтроллеров составляющее основу большинства современных контроллеров полёта. Arduino основан на AVR (ATmel), и сообщество, похоже, сосредоточено на MultiWii, как на предпочтительном коде. Microchip является основным производителем чипов PIC. Трудно утверждать, что одно лучше другого, всё сводится к тому, что может делать программное обеспечение. ARM (например, STM32) использует 16/32-битную архитектуру, при этом десятки используют 8/16-битные AVR и PIC. Поскольку одноплатные компьютеры становятся все менее и менее дорогостоящими, ожидается появление полётных контроллеров нового поколения, которые могут работать с полноценными операционными системами, такими как Linux, или Android.
Рабочая частота: Частота, на которой работает основной процессор. Также по умолчанию её называют «тактовой частотой». Частота измеряется в герцах (циклов в секунду). Чем выше рабочая частота, тем быстрее процессор может обрабатывать данные.
SRAM: SRAM расшифровывается как «Статическая память с произвольным доступом» и представляет собой пространство на чипе, которое задействуется при выполнении расчетов. Данные, хранящиеся в оперативной памяти, теряются при отключении питания. Чем выше объём оперативной памяти, тем больше информации будет «легко доступно» для расчетов в любой момент времени.
EEPROM: электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) обычно используется для хранения информации, которая не изменяется во время полёта, например настройки, в отличие от данных, хранящихся на SRAM, к которым могут относиться показания датчика и т.д.
Дополнительные порты Ввода/Вывода: большинство микроконтроллеров имеют большое количество цифровых и аналоговых портов ввода и вывода, на контроллере полёта некоторые используются под датчики, другие для связи, либо для общего ввода и вывода. К этим дополнительным портам могут быть подключены RC сервоприводы, системы подвеса, зуммеры и многое другое.
Питание

Сенсоры
С точки зрения аппаратного обеспечения, контроллер полёта по сути является обычным программируемым микроконтроллером, только со специальными датчиками на борту. Как минимум, контроллер полёта будет включать в себя 3-осевой гироскоп, но без автовыравнивания. Не все контроллеры полёта оснащаются указанными ниже сенсорами, но они также могут включать их комбинацию:
- Акселерометр: Как следует из названия, акселерометры измеряют линейное ускорение по трем осям (назовём их: X, Y и Z). Обычно измеряется в «G (на рус. Же)». Стандартное (нормальное) значение, составляет g = 9.80665 м/с². Для определения положения, выход акселерометра может быть интегрирован дважды, правда из-за потерь на выходе объект может быть подвержен дрейфу. Самой значимой характеристикой трёхосевых акселерометров является то, что они регистрируют гравитацию, и как таковые, могут знать, в каком направлении «спуск». Это играет главную роль в обеспечении стабильности многороторного БЛА. Акселерометр должен быть установлен на контроллере полёта так, чтобы линейные оси совпадали с основными осями беспилотника.
- Гироскоп: Гироскоп измеряет скорость изменения углов по трём угловым осям (назовём их: альфа, бета и гамма). Обычно измеряется в градусах в секунду. Обратите внимание, что гироскоп не измеряет абсолютные углы напрямую, но вы можете выполнить итерацию, чтобы получить угол, который, как и у акселерометра, способствует дрейфу. Выход реального гироскопа имеет тенденцию быть аналоговым или I2C, но в большинстве случаев вам не нужно беспокоиться об этом, так как все поступающие данные обрабатываются кодом контроллера полёта. Гироскоп должен быть установлен так, чтобы его оси вращения совпадали с осями БПЛА.
- Компас/Магнитометр: Электронный магнитный компас способный определять магнитное поле Земли и использовать эти данные для определения направления компаса беспилотника (относительно северного магнитного полюса). Этот сенсор почти всегда присутствует, если система имеет GPS вход и доступно от одной до трех осей.
- Давление/Барометр: Так как атмосферное давление изменяется по мере удаления от уровня моря, можно использовать сенсор давления, чтобы получить довольно точные показания высоты БПЛА. Для расчёта максимально точной высоты, большинство контроллеров полёта получают данные одновременно от сенсора давления и спутниковой системы навигации (GPS). При сборке обратите внимание, что предпочтительнее, чтобы отверстие в корпусе барометра было накрыто куском поролона, это уменьшить отрицательное влияние ветра на чип.
- Расстояние: Датчики расстояния все чаще используются на беспилотниках, поскольку GPS-координаты и датчики давления не могут рассказать вам, насколько далеко вы находитесь от земли (холма, горы или здания), либо столкнётесь ли вы с объектом или нет. Датчик расстояния, обращенный вниз, может быть основан на ультразвуковой, лазерной или лидарной технологии (ИК-сенсоры могут испытывать проблемы в работе при солнечном свете). Датчики расстояния редко входят в стандартный комплект полётного контроллера.
Режимы полёта
- ACRO — обычно режим по умолчанию, из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп (беспилотник не может автоматически выравниваться). Актуален для спортивного (акробатического) полёта.
- ANGLE — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп и акселерометр. Углы ограничены. Будет удерживать беспилотник в горизонтальном положении (но без удержания позиции).
- HORIZON — сочетает в себе стабильность режима «ANGLE», когда стики находятся вблизи центра и перемещаются медленно, и акробатику режима «ACRO», когда стики находятся в крайних положениях и перемещаются быстро. Контроллером полёта задействуется только гироскоп.
- BARO (Altitude Hold) — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и барометр. Углы ограничены. Барометр используется для удержания определенной (фиксированной) высоты, когда с аппаратуры управления не подаются никакие команды.
- MAG (Heading Hold) — режим блокировки курса (направления компаса), беспилотник будет сохранять Yaw ориентацию. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- HEADFREE (CareFree, Headless, Безголовый) — исключает отслеживание ориентации (Yaw) дрона и тем самым позволяет перемещаться в 2D направлении согласно перемещению стика управления ROLL/PITCH. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- GPS/Return to Home — автоматически использует компас и GPS, чтобы вернуться к месту взлёта. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Waypoint — позволяет беспилотнику автономно следовать по предварительно установленным GPS точкам. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Position Hold — удерживает текущую позицию с помощью GPS и барометра (если доступен). Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- Failsafe (аварийный/отказоустойчивый режим) — если другие режимы полёта заданы не были, беспилотник переходит в режим Acro. Из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп. Актуален при сбоях в программном обеспечении беспилотника, позволяет восстановить контроль над БЛА посредством ранее предустановленных команд.
Программное обеспечение

ПИД-регулятор (назначение и настройка)
Proportional Integral Derivate (PID) или Пропорционально-интегрально-дифференцирующий регулятор (ПИД) — часть программного обеспечения полётного контроллера, которое считывает данные с сенсоров и вычисляет, как быстро должны вращаться моторы, чтобы сохранить желаемую скорость перемещения БЛА.
Разработчики готовых к полёту БЛА как правило оптимально настраивают параметры ПИД-регулятора, поэтому большинство RTF беспилотников отлично пилотируются прямо из коробки. Чего не скажешь про кастомные сборки БЛА, где актуально использование универсального полётного контроллера подходящего для любой мультироторной сборки, с возможностью регулировки значений PID до тех пор, пока они не будут соответствовать требуемым характеристикам полёта конечного пользователя.

GUI
Graphical User Interface (GUI) или Графический интерфейс пользователя — это то, что используется для визуального редактирования кода (при помощи компьютера), который будет загружен в полётный контроллер. Программное обеспечение, поставляемое с контроллерами полёта, продолжает становиться все лучше и лучше; первые контроллеры полёта использовали в основном текстовые интерфейсы, которые требовали, чтобы пользователи понимали почти весь код и меняли определенные разделы в соответствии с проектом. В последнее время в GUI применяются интерактивные графические интерфейсы, с целью облегчить пользователю настройку необходимых параметров.
Связь

Bluetooth
Bluetooth и более поздние продукты BLE (Bluetooth Low Energy) изначально предназначались для передачи данных между устройствами без заморочек сопряжения или согласования частот. Некоторые имеющиеся на рынке контроллеры полёта могут отправлять и получать данные по беспроводной связи через соединение Bluetooth, что упрощает поиск неисправностей в полевых условиях.
Wi-Fi
Управление по Wi-Fi обычно достигается посредством Wi-Fi роутера, компьютера (в том числе ноутбук, десктоп, планшет) или смартфон. Wi-Fi в состоянии справится как с передачей данных, так и с передачей видеопотока, но одновременно с этим эту технологию сложнее настроить/реализовать. Как и для всех Wi-Fi устройств, расстояние удаления ограничено Wi-Fi передатчиком.
Радиочастота (RF или РЧ)
Радиочастотное (РЧ) управление в этом контексте относится к беспроводной передаче данных с компьютера или микроконтроллера на летательный аппарат с использованием РЧ передатчика/Приёмника (или двухполосного приёмопередатчика). Использование обычного радиочастотного блока, подключенного к компьютеру, позволяет осуществлять двухполосную связь на большие расстояния с высокой «плотностью» данных (обычно в последовательном формате).
Смартфон
Хоть это и не тип связи, самого вопроса, как управлять дроном используя смартфон, достаточно, чтобы уделить ему отдельный раздел. Современные смартфоны это по сути мощные компьютеры, которые по случайному совпадению могут также совершать телефонные звонки. Почти все смартфоны имеют встроенный модуль Bluetooth, а также модуль WiFi, каждый из которых используется для управления дроном и/или получения данных и/или видео.

Инфракрасное излучение (Infrared (IR))
Инфракрасная связь (то что можно найти в каждом телевизионном пульте дистанционного управления) редко используется для управления дронами, так как даже в обычных комнатах (не говоря уже об открытом пространстве) присутствует так много инфракрасных помех, что они не очень надёжны. Несмотря на то, что технологию можно использовать для управления БПЛА, не может быть предложена как основной вариант.
Дополнительные соображения
Функциональность: Производители полётных контроллеров, обычно, стараются предоставить как можно больше функций — либо включены по умолчанию, либо приобретаются отдельно в качестве опций/дополнений. Ниже приведены лишь некоторые из множества дополнительных функций, на которые вы, возможно, захотите взглянуть при сравнении контроллеров полёта.
Демпфирование: даже небольшие вибрации в раме, обычно вызываемые несбалансированными несущими винтами и/или моторами, могут быть выявлены встроенным акселерометром, который, в свою очередь, отправит соответствующие сигналы на главный процессор, который предпримет корректирующие действия. Эти незначительные исправления не нужны или не желательны для стабильного полёта, и лучше всего, чтобы контроллер полёта вибрировал как можно меньше. По этой причине между контроллером полёта и рамой часто используются виброгасители/демпферы.
Корпус: защитный корпус вокруг контроллера полёта может помочь в различных ситуациях. Помимо того, что корпус выглядит более эстетично, чем голая печатная плата, корпус часто обеспечивает некоторый уровень защиты элект. элементов, а также дополнительную защиту в случае краша.
- Четыре отверстия на расстоянии 30.5мм или 45мм друг от друга в квадрате.
- Плоская нижняя часть для использования с наклейкой.
- Четыре отверстия в прямоугольнике (стандарт не установлен).
Сообщество: поскольку вы создаете кастомный дрон, участие в онлайн-сообществе может значительно помочь, особенно, если вы столкнулись с проблемами или хотите получить совет. Получение рекомендаций от сообщества или просмотр отзывов пользователей, касательно качества и простоты использования различных контроллеров полёта, может также быть полезным.
Аксессуары: Для полноценного использования продукта, помимо самого контроллера полёта, могут потребоваться сопутствующие элементы (аксессуары или опции). Такие аксессуары могут включать, но не ограничиваются ими: модуль GPS и/или GPS антенна; кабели; монтажные принадлежности; экран (LCD/OLED);
Пример
Итак, учитывая все эти различные сравнительные характеристики, какую информацию вы можете получить о контроллере полёта и что может включать контроллер полета? В качестве примера мы выбрали Quadrino Nano Flight Controller.
Главный процессор
Сенсоры

Quadrino Nano включает микросхему MPU9150 IMU, которая включает в себя 3-осевой гироскоп, 3-осевой акселерометр и 3-осевой магнитометр. Это помогает сделать плату достаточно маленькой, не жертвуя качеством датчика. Барометр MS5611 предоставляет данные о давлении и покрыт кусочком пены. Интегрированный Venus 838FLPx GPS с внешней GPS антенной (в комплекте).
Программное обеспечение

Quadrino Nano был создан специально для использования новейшего программного обеспечения MultiWii (на базе Arduino). Вместо того, чтобы изменять код Arduino напрямую, было создано отдельное, более графическое программное обеспечение.
Читайте также: