
Игрушка машина управляемый со смартфоном сделай сам
После приобретения недорогого 7" китайского планшета и экспериментами с взаимодействием с Arduino по USB и Bluetooth захотелось сделать что-то более серьезное и полезное для своих детей. Так родилась идея сделать машинку с управлением от акселерометра Android-устройства и связи по Bluetooth каналу. До этого я никогда не увлекался робототехникой или РУ управлением, но желание было. Были поставлены три цели:
Управление машинкой (или гусеничной платформой) осуществляется путем наклона Android-устройства. Т.е. наклонили вперед - машинка едет вперед, наклонили влево - машинка поворачивает на лево, назад - машинка едет назад. Причем скорость движения или поворота зависит от степени наклона устройства. Чувствительность и величина наклона устанавливается в настройках Android-приложения. Данный способ управления достигается за счет доступа из программы к встроенному акселерометру (который сейчас имеется во всех современных Android смартфонах и планшетах).
Реализован также гибридный способ управления: газ - при помощи ползунка на экране, а поворот модельки - при помощи поворота Android-устройства (как виртуальный руль). Для заднего хода - отдельная кнопка.
Предусмотрен и обычный способ управления от кнопок на экране, но он менее функционален и в основном служит для отладки и проверки работоспособности.
В дополнении ко всему, я ради спортивного интереса реализовал и тач управление, т.е. на экране отображается круг, и чем выше двигаете в нем маркер, тем быстрее едет машинка, чуть повели пальцем влево - машинка поворачивает.
Данные обрабатываются и передаются по Bluetooth каналу на контроллер машинки, который в свою очередь через драйвер двигателей управляет моторчиками машинки.
Компоненты
1. Android устройство
Итак, первое что прежде всего потребуется - это любое Android устройство: смартфон, планшет, часы и т.п., желательно с датчиком наклона (акселерометром) и Bluetooth (или возможностью подключения внешнего модуля через USB OTG). Я использовал китайский Ainol Aurora с внешней USB Bluetooth флэшкой. Цена такого устройства на сегодняшний день составляет менее 100$.
2. Шасси для машинки

При выборе шасси обращайте внимание на питание и мощность двигателей, а также на обороты моторчиков и наличие редуктора. Хотя большинство платформ содержат стандартный 6В моторчик с редуктором.
Для принципа управления описанного в данном проекте, больше всего подходит гусеничная платформа, но т.к. у меня пока что ее нет, я реализовал проект на основе 4WD платформы.
3. Контроллер машинки
Как я уже говорил, проект планируется сделать мультиплатформенным. На текущий момент проект CxemCAR реализован для следующих аппаратных платформ:
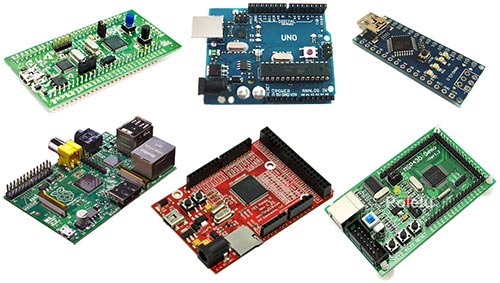
"Мозги" робота не требовательны к быстродействию МК и количеству периферии, необходимый минимум, который должен поддерживать микроконтроллер: 2 ШИМ и UART.
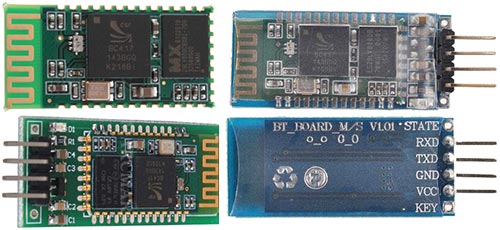
4. Bluetooth модуль
В качестве Bluetooth модуля использован дешевый китайский UART модуль HC-06. Подойдут модули вида HC-03, HC-04, HC-05, HC-06, да и вообще любые Serial Bluetooth. Лучше брать с готовыми штыревыми выводами, чтобы не пришлось паять, т.к. расстояние между выводами очень маленькое (см. 1-ой на фото внизу). Стоимость такого модуля на eBay составляет в среднем 5-10$.
Bluetooth модули и работа с ними применительно к Arduino, неплохо описаны в этой статье. Для других контроллеров все практически тоже самое, вот к примеру статья с описанием связи по Bluetooth между STM32 и Android.
5. Драйвер двигателя
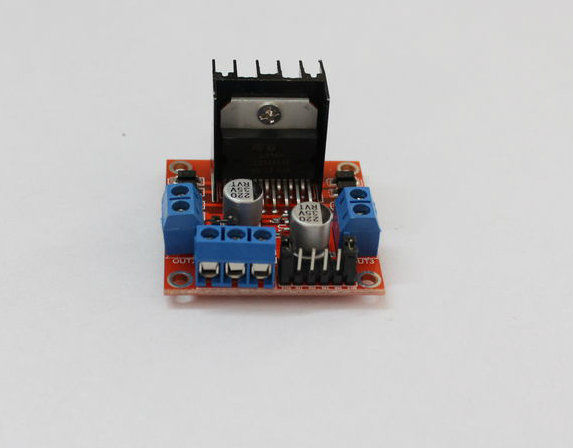
В качестве драйвера я использовал специализированную микросхему L298N, которая представляет собой сдвоенный мостовой драйвер двигателей и предназначена для управления DC и шаговыми двигателями. На eBay продаются готовые платы со всей необходимой обвязкой, цена платы составляет 4-5$ и выглядит она приблизительно так:
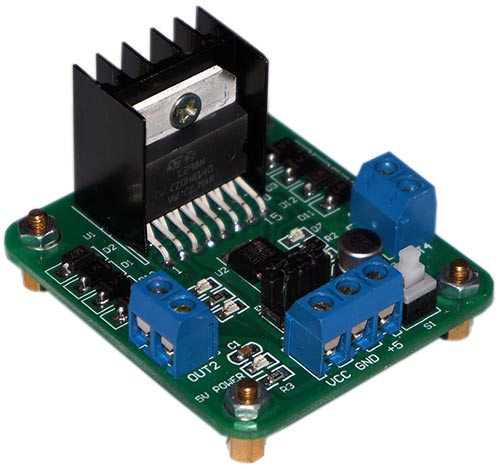
Подключение к Arduino достаточно подробно описано в этой статье. В нашем проекте для плавного изменения скорости вращения двигателей, мы будем использовать ШИМ (широтно-импульсную модуляцию).
6. Остальные комплектующие
Помимо вышеперечисленных компонентов понадобятся:
- батарейный отсек (4-5 батареек АА) или аккумуляторы, можно использовать к примеру готовые блоки Li-Po аккумуляторов на 7.4В
- соединительные провода
- выключатель питания
- термоусадочная трубка, хомуты и др.
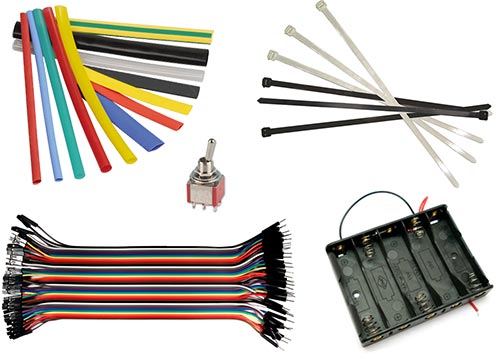
Все это конечно опционально и можно заменить тем, что есть под рукой, к примеру вместо термоусадки использовать изоленту и т.д.
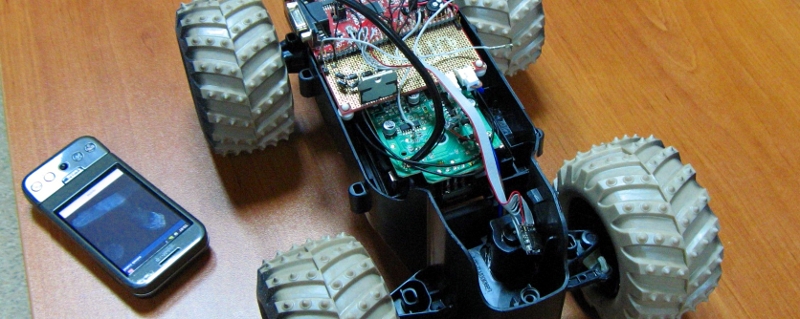
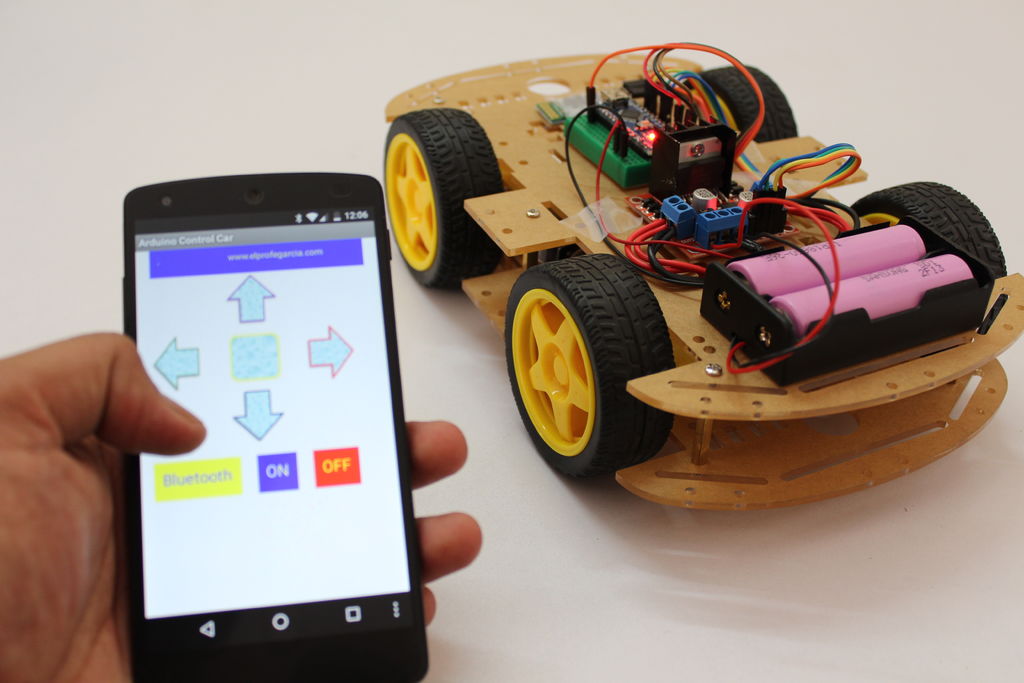
Как видите, себестоимость машинки не так уж и велика, если использовать свое шасси с моторчиками, то выходит около 20-25$ на все, если покупать и шасси, то выйдет уже 45-60$ в зависимости от типа шасси (т.к. диапазон цен на них очень широк).
Вот, что получилось у меня:

Принцип работы
В Android устройстве формируются команды перемещения машинки в зависимости от наклона смартфона/планшета, либо от нажатой кнопки. Все расчеты производятся в Android-приложении, и сразу же вычисляются значения ШИМ для левого и правого двигателей. Приложение обладает гибкими настройками, такими как диапазон ШИМ, чувствительность наклона, минимальный порог ШИМ и др. По Bluetooth передаются команды вида:
L-255\rR-120\r
L - команда для левого двигателя, R - для правого
минус обозначает вращение двигателя для движения назад
255 - число ШИМ, для Arduino это максимальная скорость вращения
\r - конец команды.
По данной команде машинка будет двигаться назад и немного поворачивать в правую сторону, т.к. правый двигатель будет вращаться медленнее левого.
L255\rR-255\r
По данной команде левый двигатель будет вращаться вперед, а правый назад, что заставит машинку вращаться вокруг своей оси против часовой стрелки.
H1\r
Команда включения дополнительного канала, к которому например можно подключить фары, звуковой сигнал и т.п. В качестве примера, приведен только один дополнитльный канал, однако ПО легко модифицировать, чтобы задействовать большее количество дополнительных каналов.
Символы команд L, R и H можно задавать в настройках Android-приложения.
В программе контроллера предусмотрен таймер, который отключает двигатели, если последняя команда была получена более, чем n-секунд назад. Настройка количества секунд хранится в EEPROM памяти контроллера и может быть изменена с Android устройства. Диапазон данной настройки составляет от 0.1 сек до 99.9 секунд. Также, настройку можно совсем отключить. Но тогда, при потере связи машинка будет ехать, пока не будет выключено питание.
Для работы с памятью микроконтроллера предусмотрены команды Fr - чтение значений и Fw - запись значений.
Электронная начинка
Структурная схема CxemCAR представлена ниже:

Как видим, к контроллеру (Arduino, STM32 и др. неважно какой) подключается Bluetooth модуль и драйвер двигателей, к которому в свою очередь подключается 2 или 4 моторчика Bluetooth-управляемой модели. На схеме изображен один выход дополнительного канала (включение звукового сигнала, фар и т.п.), но путем небольшой правки программы число дополнительных каналов может быть легко увеличено.
Работа с Android приложением
Приложение под Android писалось в среде Eclipse. Все исходники проекта и проект для Eclipse вы можете скачать ниже. Я не специалист в Java программировании и это мое первое приложение под Android поэтому кое-где код не совсем удачен. Именно на разработку Android приложения ушло основное время при разработке данного проекта. Версия Android должна быть не ниже 3.0, я все писал и тестировал под планшет с версией 4.0.3.
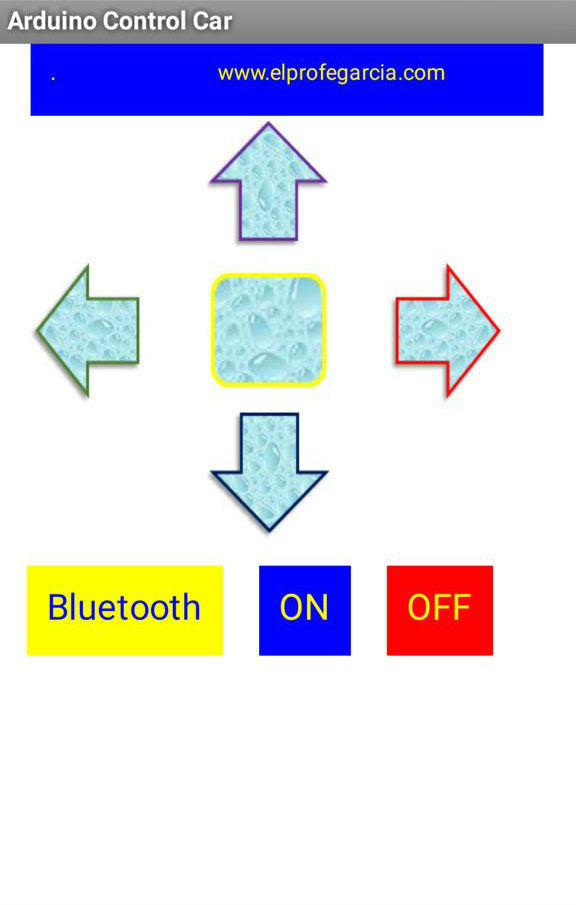
Приложение содержит несколько активити. Главное активити представляет собой начальный экран с кнопками запуска различных режимов управления и настройками:

Предусмотрено 3 режима управления Bluetooth-моделью:
Управление от акселерометра - основной способ управления. Управление движением Bluetooth-модели осуществляется за счет наклона Android-устройства (планшет, телефон и др.)
Виртуальный руль - гибридное управление. Газ - при помощи ползунка, повороты - при помощи поворота устройства. Задний ход - отдельной экранной кнопкой.
Управление от кнопок - на экране приложения выводятся 4 кнопки управления: вперед, назад, влево и вправо. При нажатии кнопки "вперед" машина едет вперед пока держите кнопку, при нажатии "назад" тоже самое, но едет назад. При нажатии кнопок "влево" или "вправо" машинка крутится вокруг своей оси в одну или в другую сторону. При этом значение скорости фиксировано (по умолчанию стоит максимальная скорость), но в настройках можно изменить данный параметр.
Управление от touch - данный способ управления я подсмотрел в игре DeathRally и ради спортивного интереса решил повторить. Честно сказать поучилось не очень удобно, но может кому-нибудь пригодится. На экране рисуется круг, внутри которого и происходит процесс управления. Повели пальцем вверх относительно центра - машинка едет вперед, чуть левее - машинка начинает поворачивать влево. Насчет этого способа управления, есть в дальнейшем идея усовершенствования с помощью компаса, т.е. использовать круг не как задатчик скорости и поворота, а задавать с помощью него направление движения.
Настройки приложения
Скриншот настроек Android приложения CxemCar версии 1.0:

К каждой настройке внизу есть небольшое пояснение, поэтому с их предназначением думаю не должно возникнуть вопросов. Однако на некоторых из них хотелось бы остановиться более подробно.
Точка разворота для мотора (ось X)
При наклоне Android-устройства влево или вправо программа притормаживает тот двигатель, в сторону которого наклонено устройство, т.о. осуществляется поворот. Однако, когда значение наклона доходит до заданной в настройках точки разворота, то двигатель начинает вращаться в другую сторону. Если наклонить устройство максимально вбок, то один двигатель будет вращаться с максимальной скоростью в одну сторону, а другой в другую и соответственно машинка будет крутиться вокруг своей оси на месте.
MAC адрес
Для установления связи с Bluetooth модулем машинки, в настройках приложения необходимо задать MAC-адрес. Предварительно необходимо настроить сопряжение устройств в настройках вашего Android-устройства. Для этого переходим в Настройки -> Bluetooth и нажимаем "Поиск устройств", телефон находит наш Bluetooh-модуль, нажимаем по нему и вводим пароль (как правило 1234).
Узнать Bluetooth адрес модуля можно из какого-нибудь приложения, к примеру Bluetooth Terminal. Для этого внизу нажимаем "Connect a device - Secure" и в появившемся окошке нажимаем кнопку "Scan for devices". ПО сканирует Bluetooth устройства и отобразит их MAC-адреса:

Этот MAC-адрес и необходимо прописать в настройках приложения CxemCAR.
Само ПО под Android я не буду расписывать, т.к. оно довольно таки громоздкое и поэтому если у вас возникнут какие-либо вопросы по нему, то обращайтесь тему поддержки данного проекта на форуме.
Сборка платформы

Как я уже говорил выше, в качестве платформы я выбрал шасси Pirate-4WD от производителя DFRobot (SKU:ROB0003). Это одно из самых популярных шасси, вот его описание и видео по сборке. Хотя там все интуитивно понятно и сборка очень проста.
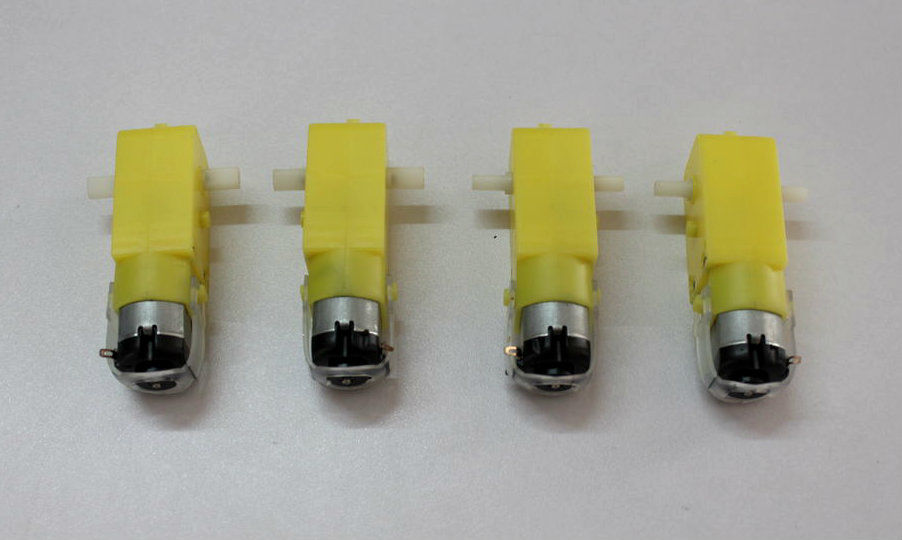
После того, как была собрана основа шасси с моторами, припаиваем провода и на всякий случай маркируем моторчики:
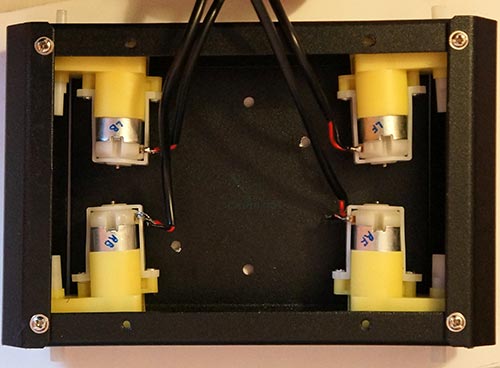
На верхнем фото хорошо видно, что левые и правые двигатели относительно друг-друга расположены несоосно из-за непродуманности китайской конструкции, и из-за этого колеса немного проскальзывали при движении. Поэтому потребовалось небольшая доработка, для этого я вырезал распорки из пластика и вставил их между двигателями.
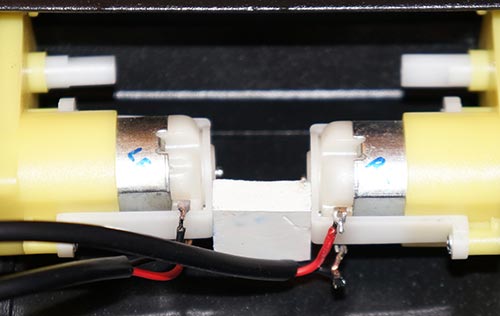
Стало немного лучше, но все равно остался небольшой градус у колес. Однако, как показали дальнейшие испытания, это не сильно влияло на ходовые качества платформы. Поэтому не стал углубляться в доработку шасси и оставил как есть с распорками.
Следующим этапом является установка колес. На вал они налезают очень туго, кое-где даже пришлось подпилить каттэром.
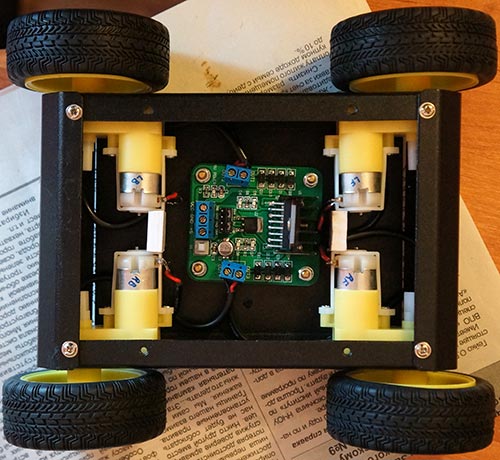
Провода от 4-х моторов подключаем к плате драйвера двигателей L298N, левые 2 мотора просто запаралеленны, тоже самое и правые.
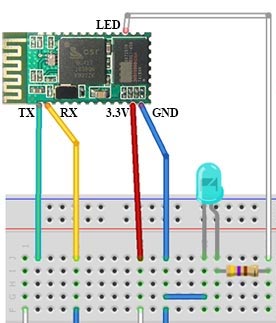
Для того, чтобы можно было видеть состояние Bluetooth соединения, у модуля HC-06 (да и у других тоже) присутствует возможность подключения светодиода состояния. Я решил его также подключить и вывести на видное место. Для этого, я использовал токоограничительный резистор номиналом 470 Ом и термоусадочную трубку.

К модулю Bluetooth подключаем или подпаиваем все необходимые провода, помимо светодиода это питание, GND, TX и RX. Смотрите документацию на ваш Bluetooth модуль. Чтобы не мучаться с пайкой, я вам советую сразу взять модуль с подпаянными штыревыми выводами (см. фото выше). И лучше брать модули HC-03/HC-05.
Я же использовал модуль HC-06, который у меня был до этого. Схема распайки следующая:
В распаянном виде модуль выглядит так:
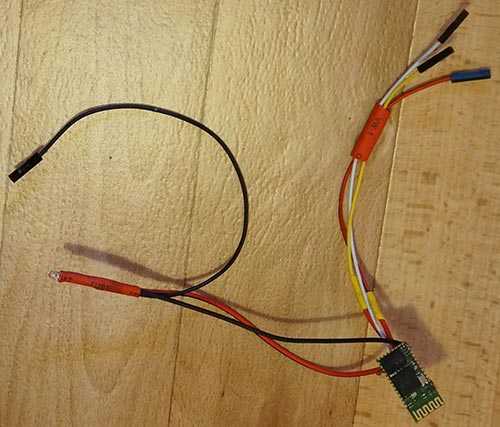
Его я также разместил в термоусадочной трубке большого диаметра.
Для питания двигателей я использовал батарейный отсек на 5 элементов типа АА, т.е. напряжение питания двигателей составило 7.5 Вольт. Можно использовать LiPo и другие аккумуляторы. Для крепления батарейного отсека в крышке шасси просверлил два отверстия и закрепил при помощи двух болтов.

История изменений ПО для Android:
Версия 1.1 (от 28.01.2013) - в классе cBluetooth изменения для более стабильного подключения по Bluetooth. Теперь не нужно вводить код для pairing (связывания устройств)
Версия 1.2 (от 15.02.2013) - дополнен класс cBluetooth на предмет установки соединения с устройством (полезно при отладке). Изменения в классе Handler (исправлены все ошибки с static). Реализован новый вид управления - "виртуальный руль".
Версия 1.3 (от 20.07.2013) - мелкие правки в активити. Исправление ошибки с инверсией координат на смартфонах
На последней сессии я как обычно тщательно готовился к экзаменам (то есть не знал, чем себя занять), и как по счастливой случайности, у меня образовалась радиоуправляемая машинка, большая и красивая, хотя и явно рассчитанная на детей. Поигравшись минут десять, я захотел ее модернизировать, а именно вместо неудобного джойстика с радиусом действия в 3 метра использовать коммуникатор с bluetooth. И удобнее, и дальность действия больше, и явно видны дальнейшие улучшения, о которых, как впрочем и о процессе прикручивания коммуникатора к детской машинке, и пойдет речь в данной статье.
Выбираем компоненты
В прошлом мы с приятелями написали собственную прошивку для роботов Lego Mindstorms NXT, поддерживающую удалённое управление роботом по bluetooth с Android-коммуникатора. Для экспериментов тогда была приобретена отладочная плата Olimex SAM7 с ARM7 на борту, которую в этот раз можно использовать в качестве управляющего контроллера.
В качестве шасси используем корпус игрушечной машинки.
Нужен bluetooth-модуль. Результат хотелось получить быстро, поэтому модуль был выбран из единственного доступного в магазине на тот момент BTM-112, хотя он оказался сравнительно дорогим.
Кроме того, оказалось, что управление с платы не может идти напрямую на моторы, нужен усиливающий контроллер (об этом чуть позже).
- Машинка
- Управляющий контроллер Olimex SAM7
- Bluetooth-модуль BTM-112
- Контроллер для управления моторами L298N
Соединяем bluetooth с управляющей платой
Для начала настроим доставку команд управляющему блоку. Схема соединения bluetooth-модуля и контроллера простая: по сути дела это UART с некоторыми управляющими ножками, то есть надо лишь присоединить модуль к интегрированному UART-контроллеру.
Удалённое управление
Как было обещано, удаленное управление осуществляется с помощью Android-коммуникатора.
Наше прошлое приложение для Android (которое управляло Lego Mindstorms NXT, тоже посредством bluetooth) с помощью акселерометра отслеживало наклон коммуникатора и посылало соответствующие команды управления на NXT. Так что наиболее простым решением стало добавление протокола управления машинкой в уже существующее приложение. Сам протокол достаточно примитивен: фиксированная длина команды, фиксированный заголовок, после чего управление по осям X и Y.
Итак, на данном этапе мы можем “порулить” нашей платкой, правда моторы пока не подключены, так что индикация движений производится встроенными светодиодами (видео, к сожалению, нет, в этот момент снял только фотку), но всё равно прогресс есть, он виден, и это греет душу.
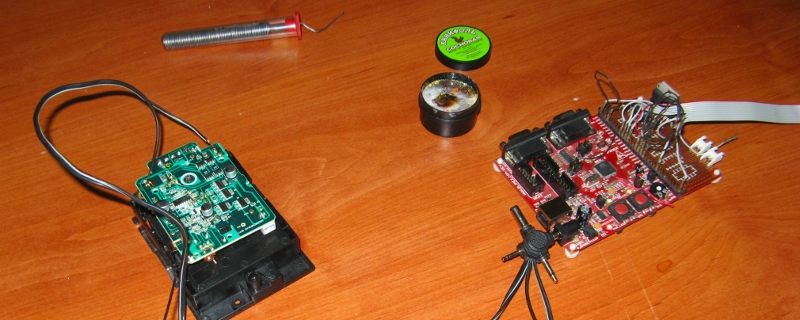
Соединяем управляющую плату с моторами
Изначально я думал, что смогу использовать управление со старой платы (зашитой в саму машинку), но оказалось, что использовать её в чистом виде нельзя, поскольку управление моторами было крепко сцеплено с радиочастью. Управлять моторами напрямую с ног головного контроллера тоже не получится из-за малой выходной мощности микросхемы. К сожалению, опыта в этой области у меня нет никакого (все-таки я программист, а не схемотехник), поэтому пришлось прибегнуть к помощи знакомых. По совету я взял микросхему усилителя L298N (избыточную для моих нужд, зато работающую из коробки) и собрал референсную схему.
Напомню, препарируемая машинка детская, и управление у нее немного хромает; когда я начал разбираться с моторами, я понял одну из причин. Для механизма поворота используется не сервопривод, а обычный электродвигатель, который может находиться в одном из трех состояний (выкл., вперед и назад). Таким образом, о плавном повороте мечтать не приходится.

Шаг первый: изготовление платы
Сначала мастер спроектировал печатную плату используя программу Autodesk Eagle.Эта программа представляет собой программу САПР, специально разработанную для проектирования печатных плат. Это программное обеспечение бесплатно для двусторонних плат до 80 см², что вполне достаточно для любителей.


Можно изготовить плату самостоятельно, а можно заказать ее на PCBWAY



.
Шаг второй: монтаж платы
Дальше мастер приступает к монтажу платы.
В схеме есть SMD-компонент (AMS1117 5V) и сначала нужно припаять его.




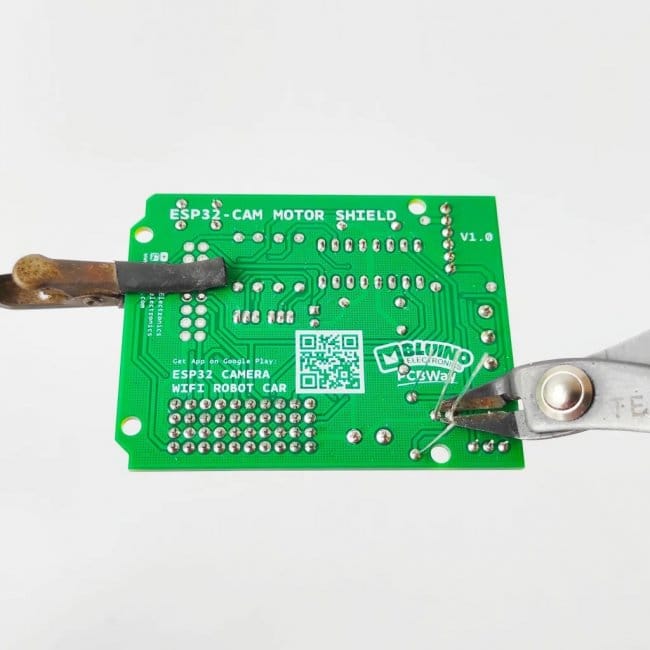



Сгибает ножки длинного разъема и вставляет его в другой разъем. Фиксирует их суперклеем. Затем вставляет разъем в припаянный ранее и устанавливает ESP32-Cam.








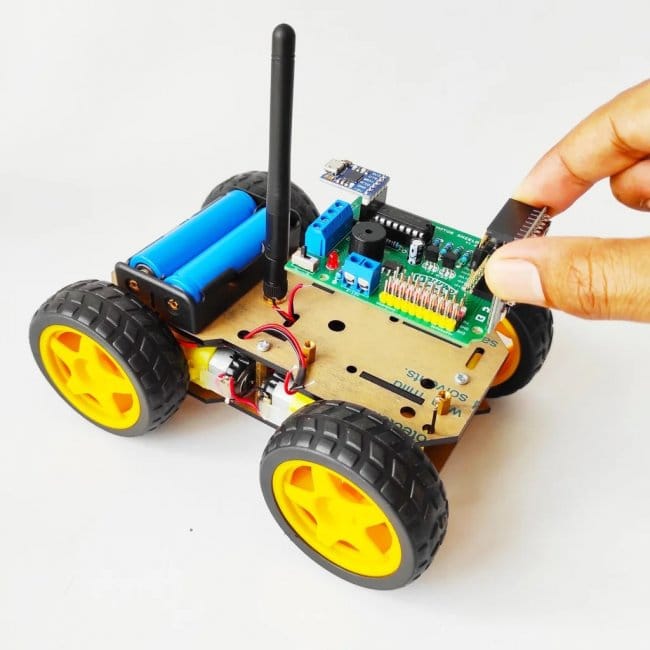
Шаг третий: сборка машинки
Можно использовать любое нестандартное шасси, которое есть у пользователя. Печатная плата материнской платы имеет ту же форму и размер, что и Arduino Uno , поэтому подобрать шасси не сложно.
Левый и правый двигатель подключает к винтовым клеммам на выходе драйвера двигателя материнской платы. Подключает батарею к плате.

Шаг четвертый: программирование
Чтобы машиной можно было управлять с помощью смартфона Android, нужно сначала запрограммировать ESP32-Cam. Нужно выполнить следующие действия:
Установите ESP32 Camera WiFi Robot Car из Google Playstore
Откройте приложение, в строке меню выберите diagram и Code icon.
Выберите настройки меню, в параметре option Motor Driver выберите ESP32-Cam Motor Shield, в параметре «Upload Firmware» выберите «USB OTG». Для подключения Wi-Fi автомобиля к сети маршрутизатора, нужно установить имя SSID и пароль. Подключите ESP32- Cam Board к вашему смартфону используя адаптер USB OTG.
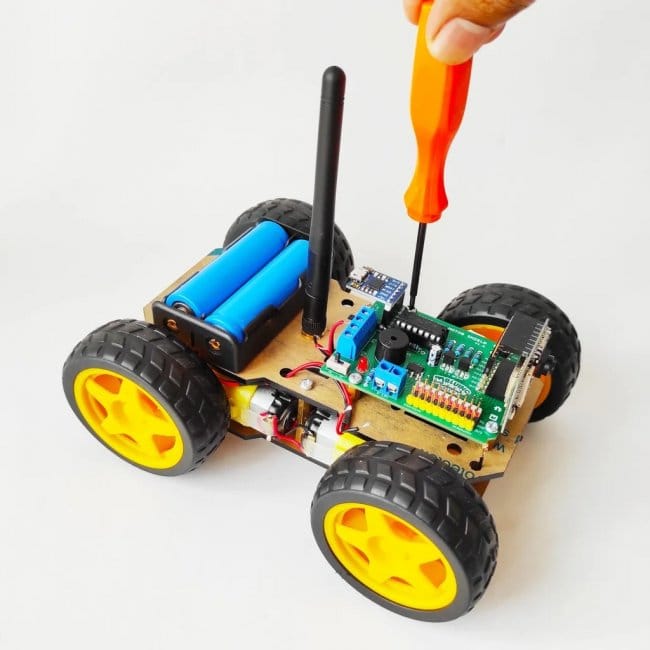
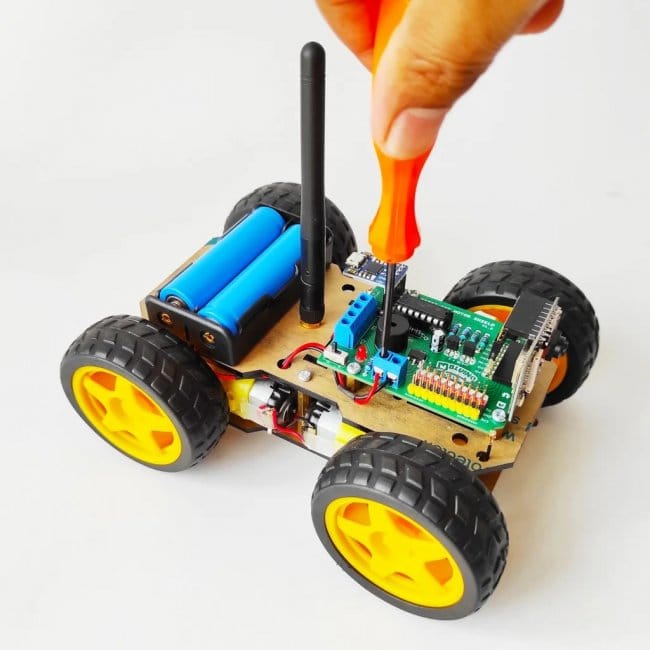
Для подготовки к загрузке удерживая переключатель GPIO0, нажмите кнопку сброса настроек.
На последнем этапе кликните значок загрузки и дождитесь ее завершения.
После завершения загрузки программы нажмите кнопку сброса.
Можно запрограммировать плату ESP32-Cam через компьютер с помощью программного обеспечения Arduino IDE, используя эскизы ниже:
эскиз нужно сохранить как "esp32cam_wifi_robot_car_l293d.ino"
Сохраните эскиз ниже как "app_httpd.cpp"



Все готово, а более подробно о самоделке можно посмотреть на видео ниже.
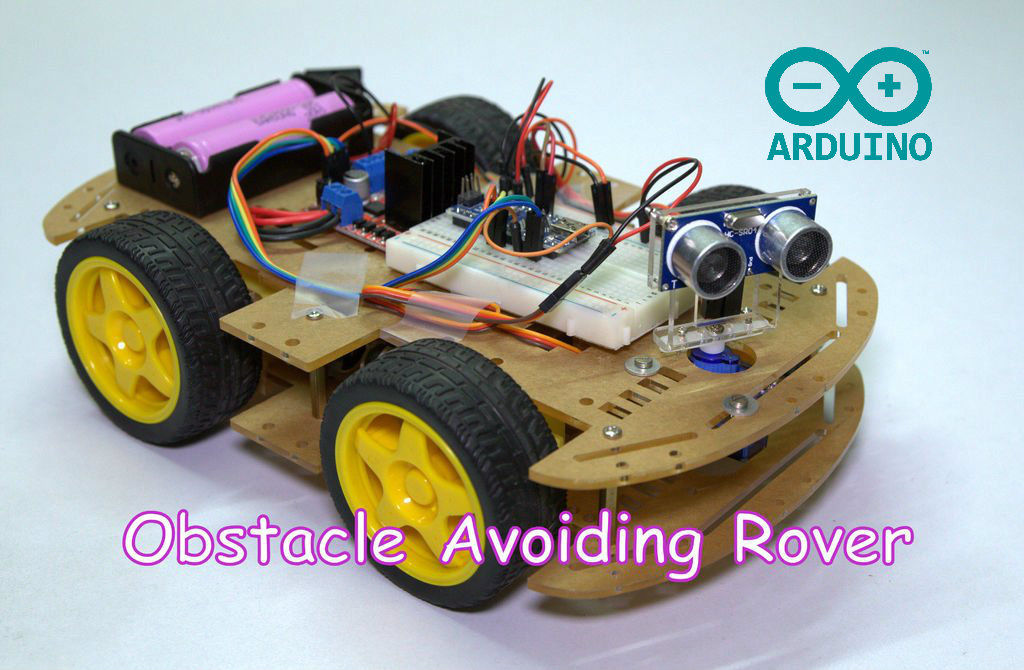
Это первый роботизированный проект, который я когда-либо делал, и если вы никогда не пробовали собрать робота, то, скорее всего, думаете что это сложно. Но Ардуино и шасси 2WD / 4WD сделают вашу сборку намного проще, и вы соберете своего первого робота с радиоуправлением на Ардуино без каких-либо мучений.

По пути ко мне пришла идея о создании радиоуправляемой машины своими руками, которая бы объезжала препятствия, поэтому я собрал и этот проект, видео и файл программы к которому прикладываю ниже.
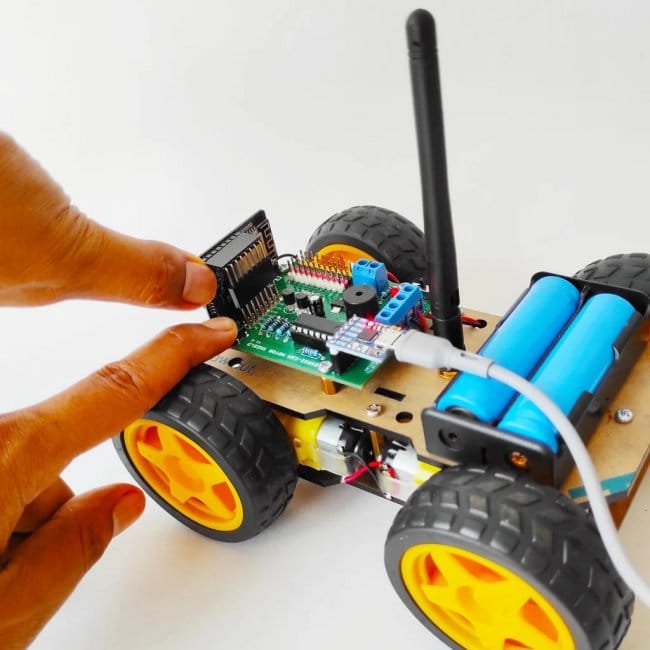
Шаг 1: Нужные части и инструмент
Я воспользовался готовыми решениями, и все запчасти и инструменты были приобретены через интернет.
- Набор шасси 4WD для робота (GearBest)
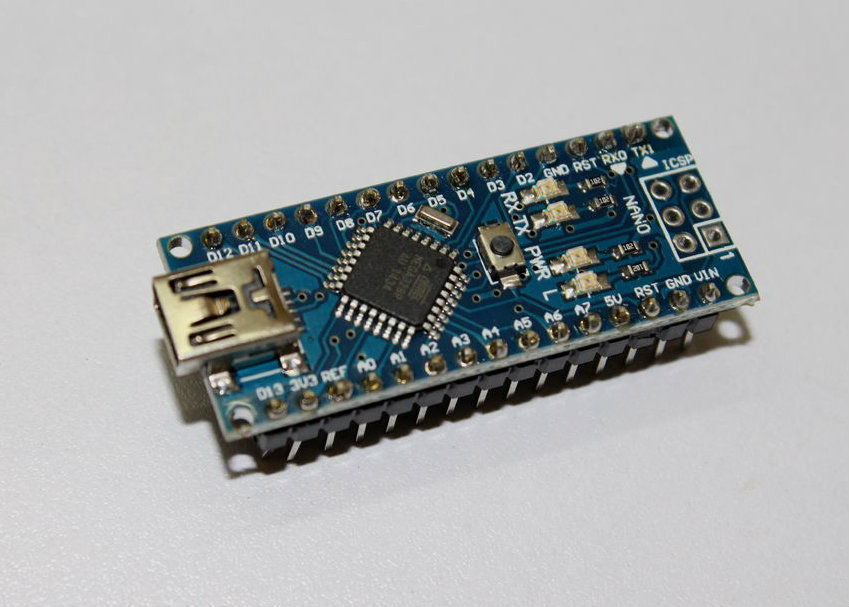
- Arduino Nano (GearBest)
- Модуль H-моста LM298 (GearBest)
- Модуль bluetooth HC-06 (Amazon)
- Литий-ионные батарейки 2 x 18650 (GearBest)
- Отсек для батареек 2x 18650 (GearBest)
- Небольшая макетная плата (GearBest)
- Провода сечением 0.5 мм2
- Провода с джамперами папа-мама (Amazon)
- Провода с джамперами мама-мама (Amazon)
- Малярная лента, изолента или что-то подобное (Amazon)
Для робота, объезжающего препятствия:
- Паяльник (Amazon)
- Кусачки (Amazon)
- Стриппер для провод (GearBest)
- Клеевой пистолет (GearBest)
Шаг 2: Что такое робот?
Робот – это электромеханическое устройство, которое способно каким-либо образом реагировать на окружающую обстановку и принимать самостоятельные решения или действия, чтобы достичь определенных целей.
Робот состоит из следующих компонентов:
- Структура / Шасси
- Привод / Мотор
- Контроллер
- Вводные устройства / Датчики
- Источник питания
В следующих шагах я опишу каждый из этих компонентов, и вы всё легко поймёте.
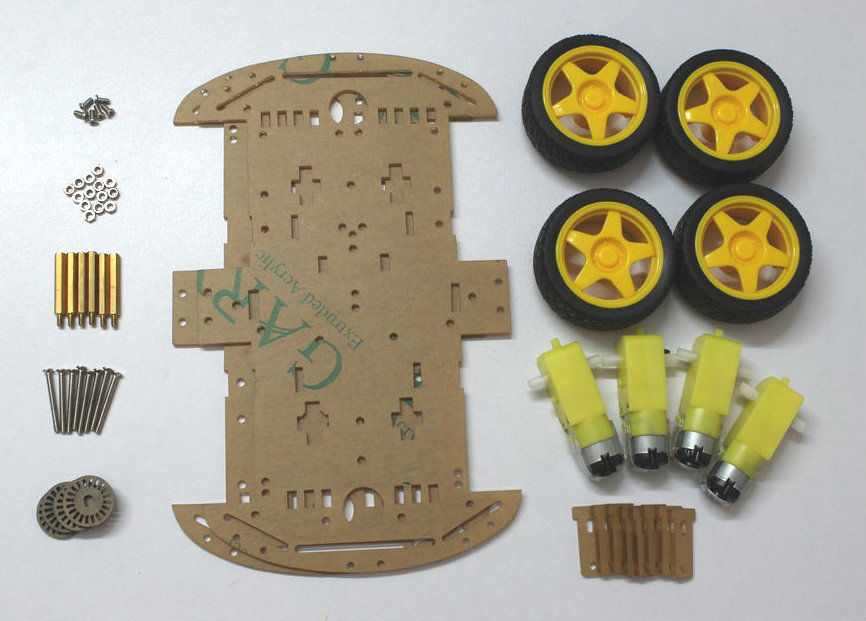
Шаг 3: Структура / Шасси



Структура состоит из физических компонентов. Робот имеет один или несколько физических компонентов, которые каким-либо образом двигаются для выполнения задания. В нашем случае структура робота – это шасси и колёса.
Шаг 4: Приводы

Под приводом можно понимать устройство, которое преобразовывает энергию (в робототехнике под энергией понимается электрическая энергия) в физическое движение. Большинство приводов производят вращательное или линейное движение.
В нашем случае привод – это DC-мотор, скорость которого равна 3000 оборотам в минуту, а вращающий момент 0.002 Н•м. Теперь добавим к нему шестерню с передаточным числом 1:48. Новая скорость уменьшается на коэффициент 48 (в результате давая 3000/44 = 68 оборотов в минуту) и вращающий момент увеличивается на коэффициент 48 (в результате давая 0.002 x 48 = 0.096 Н•м).
Шаг 5: Подготавливаем клеммы моторчиков
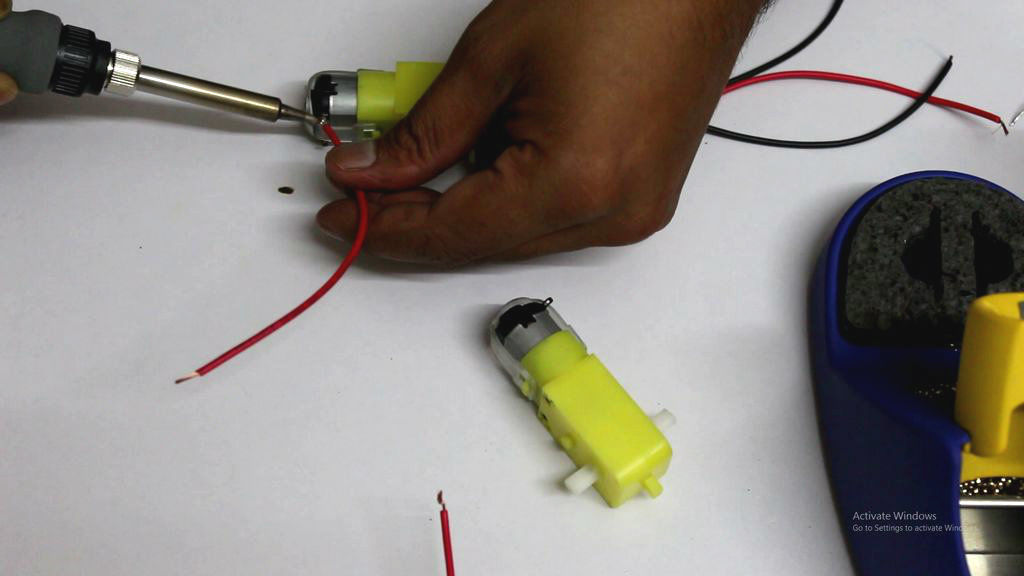

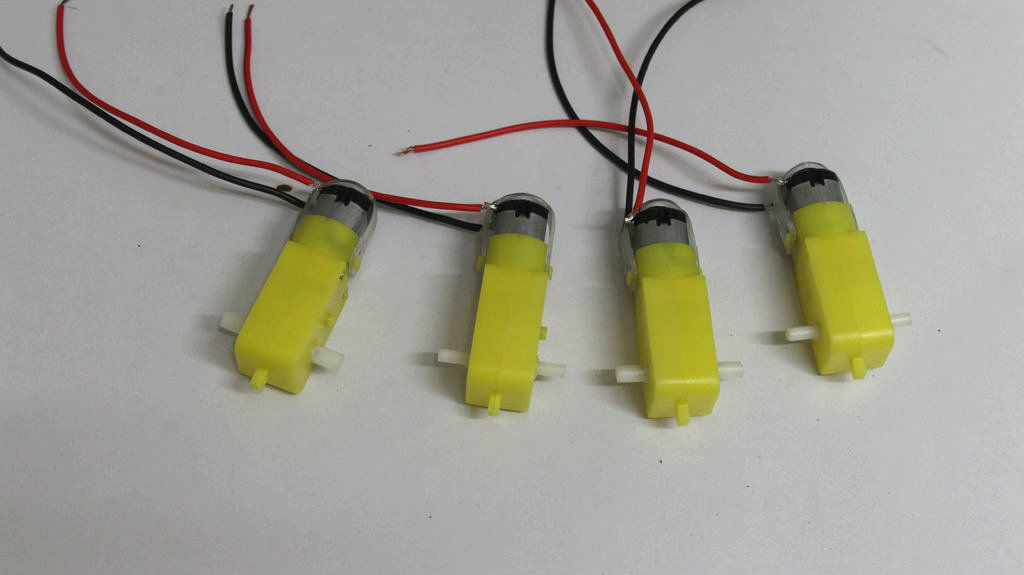
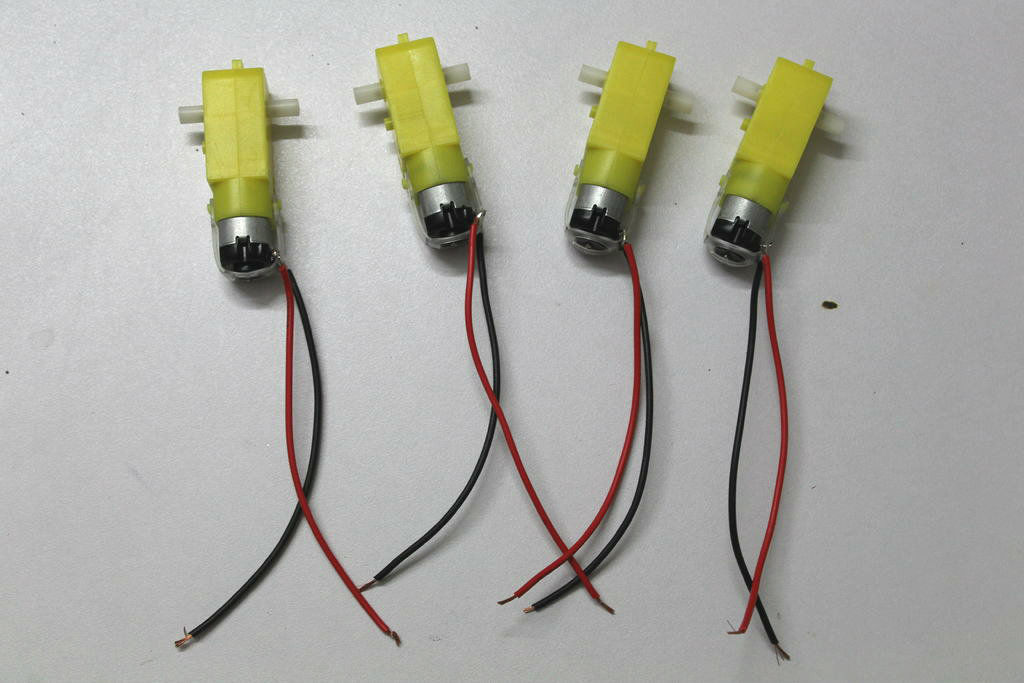
Отрежьте по 4 провода красного и черного цвета длиной примерно 12-15 см. Я использовал провода сечением 0.5 мм2. Оголите концы проводов. Припаяйте провода к клеммам моторчиков.
Вы можете проверить полярность моторчиков, соединив их с отсеком для батареек. Если он движется в прямом направлении (с красным проводом на позитивной и черным на негативной клеммах батареек), то с соединением все в порядке.
Шаг 6: Устанавливаем мотор
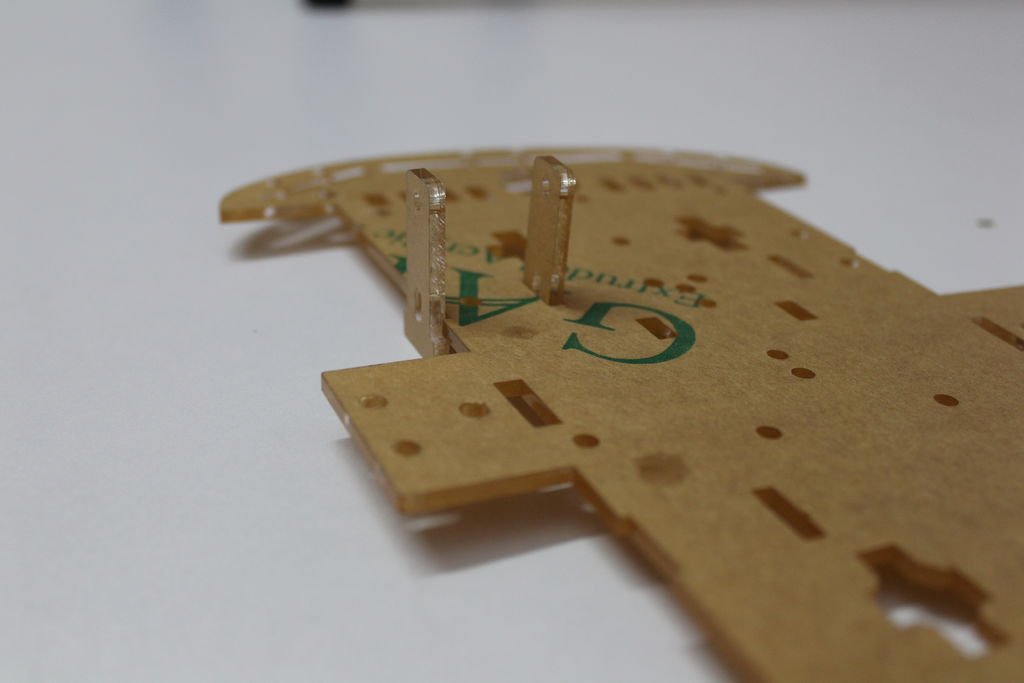
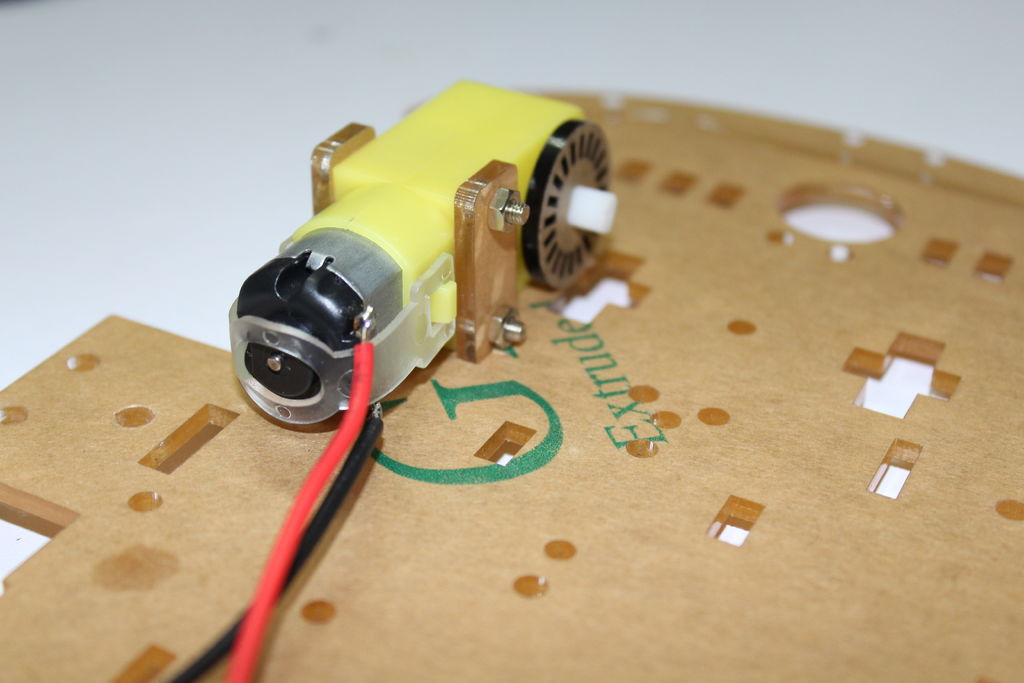
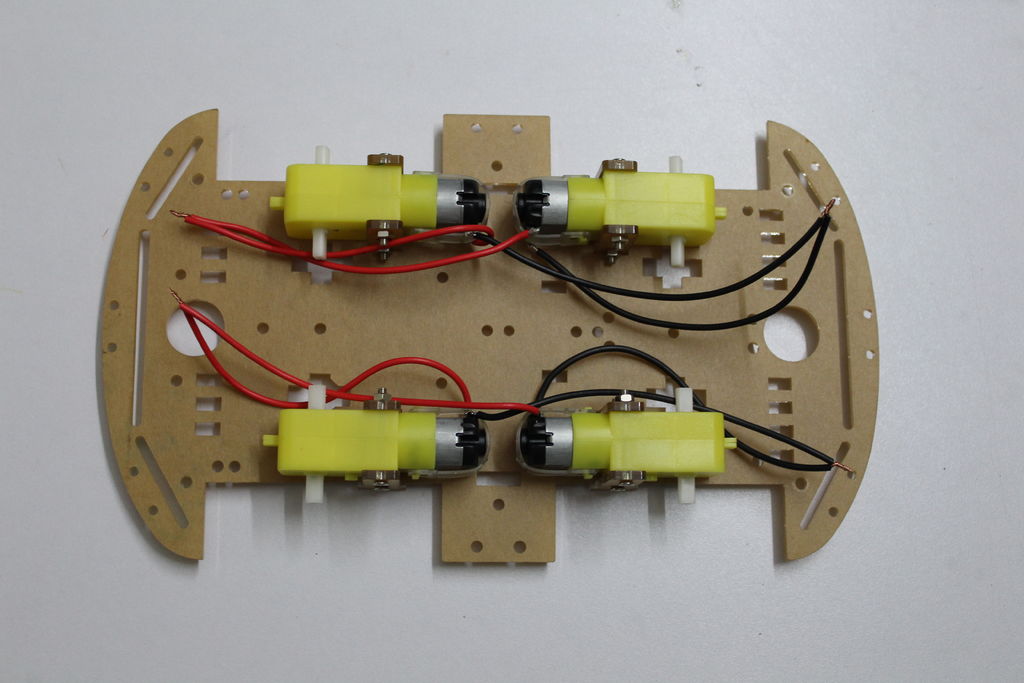
Прикрепите две акриловые распорки к каждому мотору при помощи двух длинных болтов и двух гаек. Для наглядности вы можете посмотреть видео.
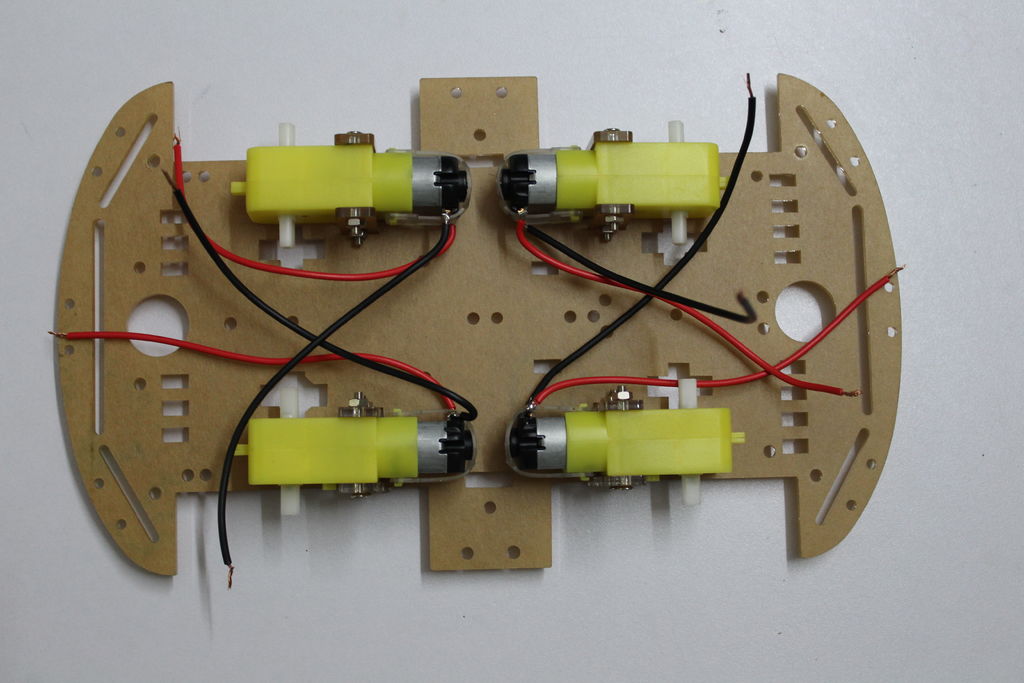
Возьмите на заметку, что провода на каждом моторе ведут к центру шасси. Соедините оба красных и оба черных провода от моторов с каждой стороны шасси. После соединения у вас будет две клеммы на левой стороне и две на правой.
Шаг 7: Устанавливаем крышу
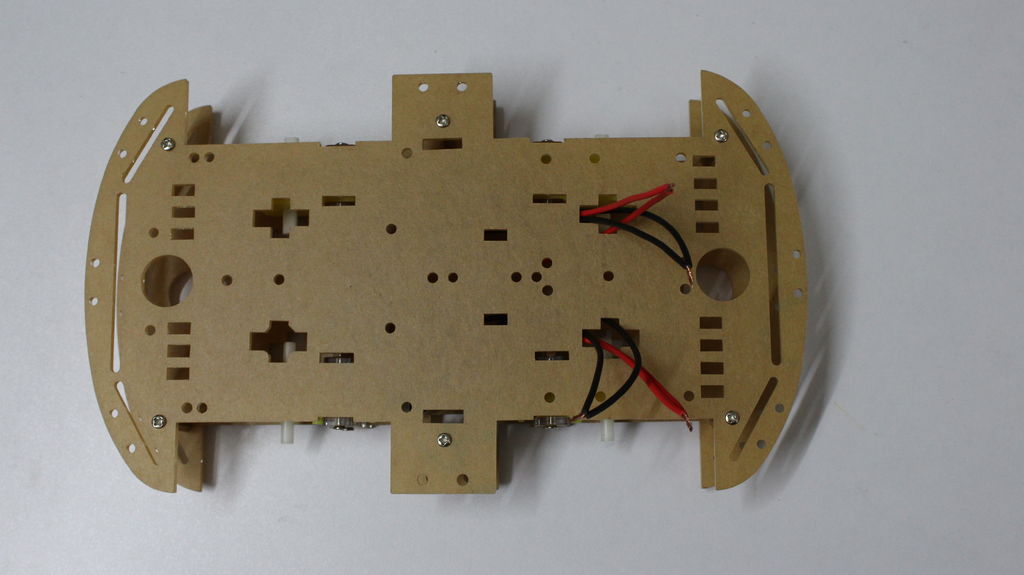
Послу установки 4 моторов нужно установить крышу. Приладьте 6 медных стоек при помощи гаек, клеммы проводов выведите сквозь отверстие в крыше.
Шаг 8: Контроллер
Теперь у нас установлены шасси и приводы, но нам не хватает контроллера. Шасси без контроллера никуда не поедут. Робот будет оставаться на месте, оставаясь безжизненным. Поэтому, для того чтобы робот перемещался, нам нужен мозг (контроллер).
Контроллер – программируемое устройство, способное работать по заданной программе и отвечающее за все вычисления, принятие решений и коммуникацию. В нашем случае в качестве контроллера мы используем микроконтроллер Ардуино Нано.
Контроллер принимает входные данные (с датчиков, удалённо и т.д.), обрабатывает их и затем даёт команду приводам (моторам) выполнить выбранное задание.
Если вы подключите позитивный провод от батарей на одну строну моторчика, затем подключите негативный провод от батарей на другой контакт моторчика, то он начнёт крутиться вперёд. Если вы поменяете провода местами, то мотор начнёт вращаться в другую сторону.
Микроконтроллер можно использовать, чтобы вращать мотор в одном направлении, но если вам хочется с помощью микроконтроллера вращать мотор и вперёд, и назад, то вам нужна дополнительная схема – H-мост. В следующем шаге я объясню, что это такое.
Шаг 9: Н-мост (модуль LM 298)
Что такое Н-мост?
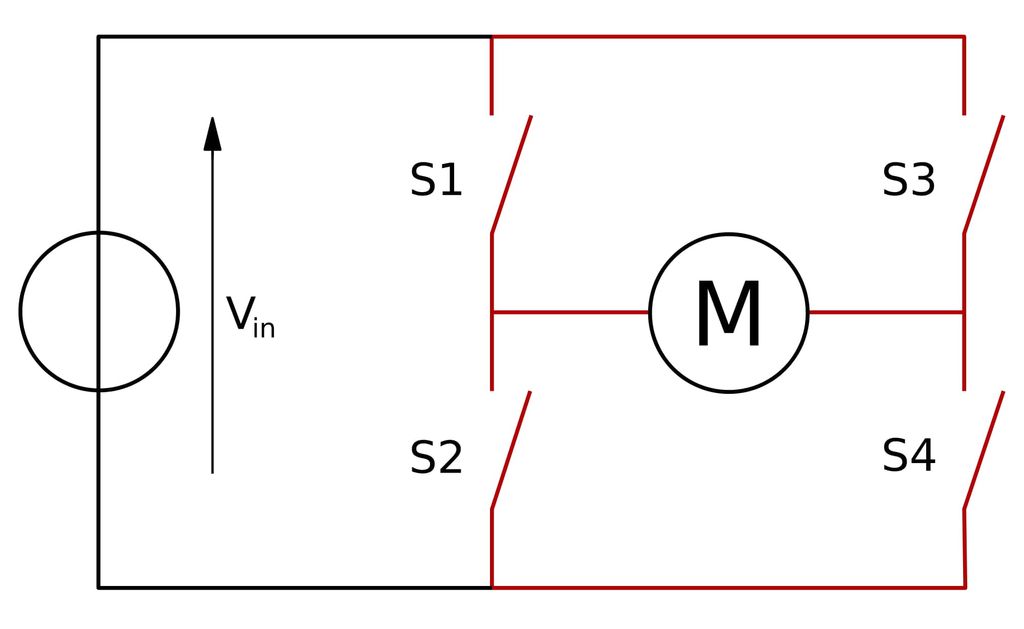
Термин Н-мост произошел от типичного графического представления этой схемы. Это схема, которая может вращать мотор как в прямом, так и в обратном направлении.
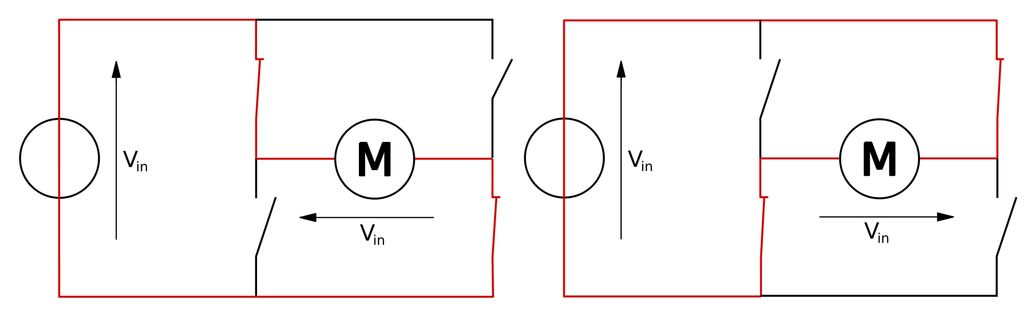
Принцип работы:
Посмотрите приложенную картинку для понимания принципа работы схемы Н-моста. Мост состоит из 4 электронных выключателей S1, S2, S3, S4 (транзисторы / MOSFET/ IGBTS).
Когда выключатели S1 и S4 закрыты, а остальные два открыты, положительное напряжение будет проходить через мотор, и он будет вращаться в прямом направлении. Таким же образом, когда закрыты выключатели S2 и S3, а S1 и S4 открыты, обратное напряжение будет даваться на мотор и он начнёт вращаться в обратном направлении.
Заметка: выключатели на одной руке (то есть S1, S2 или S3, S4) никогда не закрываются одновременно – это создаст короткое замыкание.
Н-мосты доступны в виде интегральных схем, либо можно собрать свой мост при помощи 4 транзисторов или MOSFET. В моём случае используется интегральная схема Н-моста LM298, которая позволяет управлять скоростью и направлением моторов.
В отличие от людей, роботы не ограничены лишь зрением, звуком, осязанием, обонянием и вкусом. Роботы используют различные датчики для взаимодействия с внешним миром.
Датчик – это устройство, которое выявляет и отвечает на определенные типы входящей информации из окружающего мира. Этой информацией может быть свет, тепло, движение, влажность, давление или любое другое явление окружающей среды.
Шаг 11: Источник питания







Чтобы управлять приводами (моторами) и питать контроллер, роботу нужен источник питания. Большинство роботов питается от батарей. Когда мы говорим о батареях, то имеем в виду множество вариантов:
- Алкалиновые батарейки AA (не заряжаются)
- Никель-металгидридные или никель-кадмиевые батарейки AA (заряжаются)
- Литий-ионные батареи
- Литий-полимерные батареи
В зависимости от ваших нужд, нужно выбрать подходящий вид батарей. По-моему мнению, нужно всегда выбирать заряжаемые батареи достаточной ёмкости. Я использовал 2 литий-ионные батареи стандарта 18650 ёмкостью 2600mAh. Если для автономности вам нужно больше мощности, используйте большой комплект батарей, например 5A turnigy.
Отсек для батарей:
Отсек для батарей я заказал в Китае, он не подходил для батарей с плоским верхом, поэтому я использовал два неодимовых магнита для придания батарейкам нужной формы.
Зарядка:
Для зарядки батарей нужен хороший зарядник. По моему опыту, эти зарядники хорошо зарекомендовали себя:
- PowerEx AA Charger-Analyzer (Amazon)
- XTAR LiIon Battery Charger (Amazon)
- Turnigy LiPo Battery Charger (Amazon)
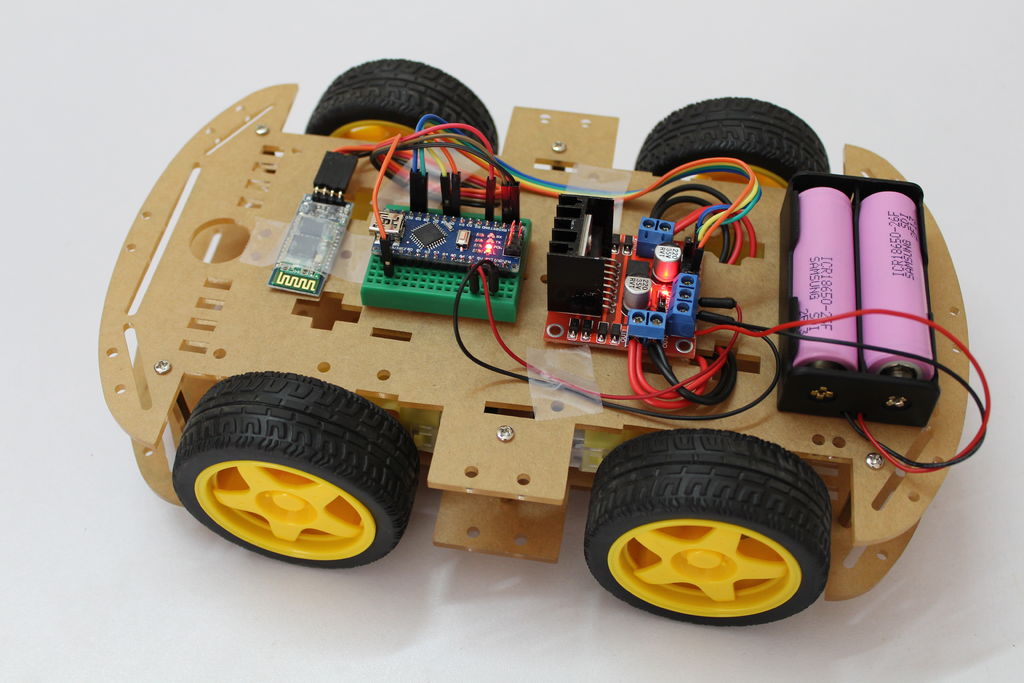
Шаг 12: Установка компонентов
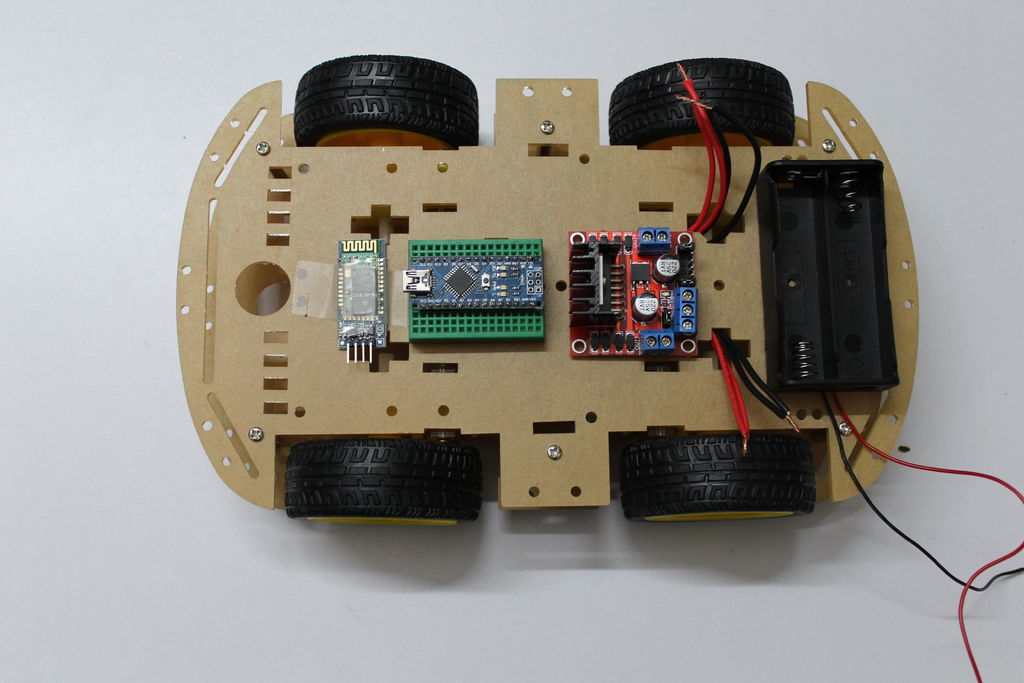
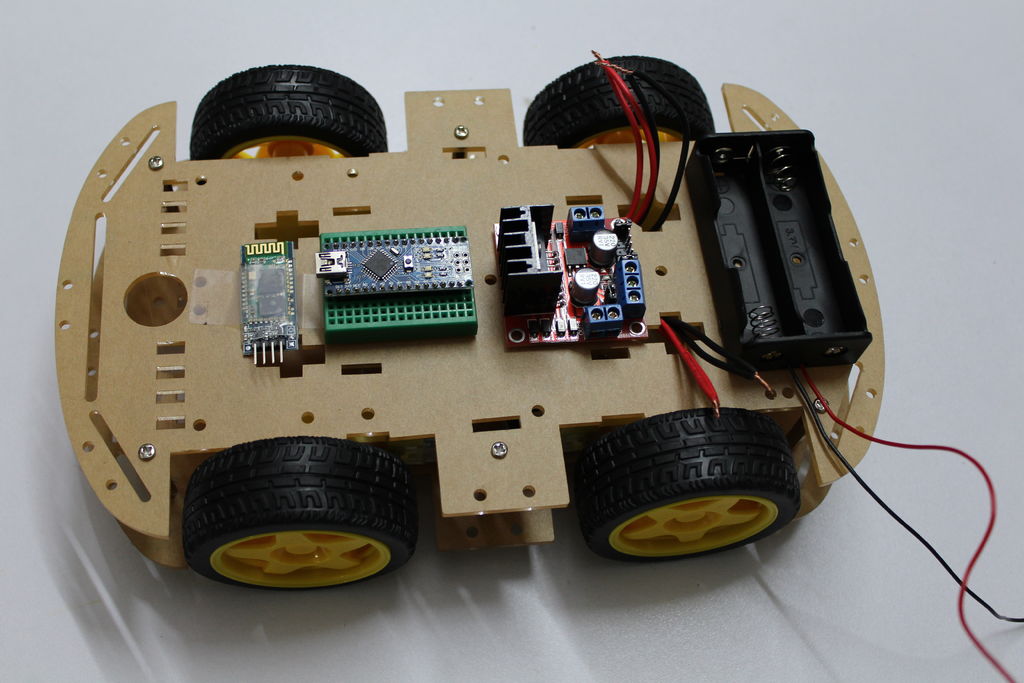
Цельная схема устанавливается на крыше. Отсек для батарей, драйвер двигателей LM 298 и маленькую макетную плату я закрепил горячим клеем, но можно просто прикрутить их. Модуль bluetooth закрепляется скотчем. Ардуино нано вставьте в макетную плату.
Шаг 13: Электропроводка
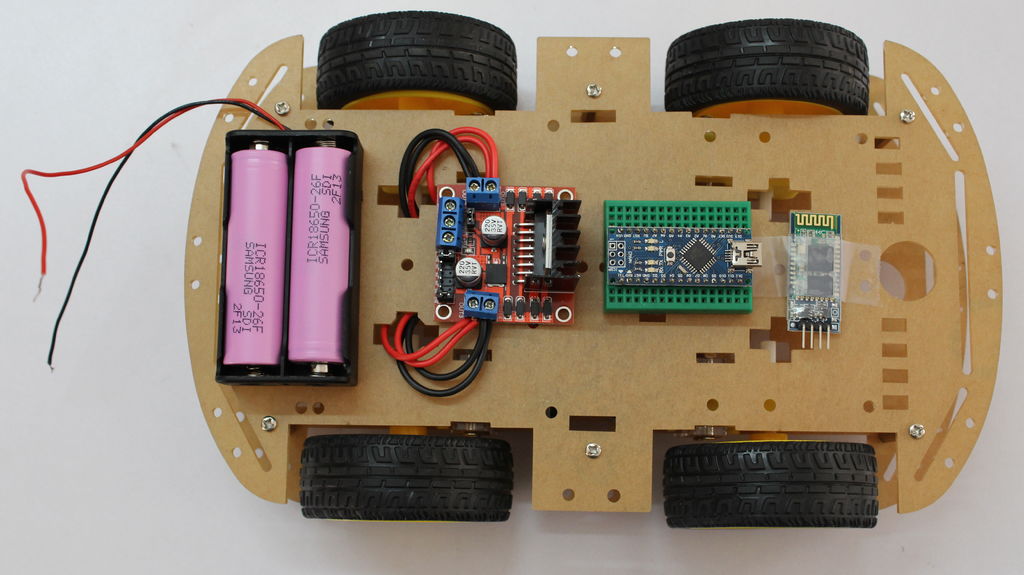
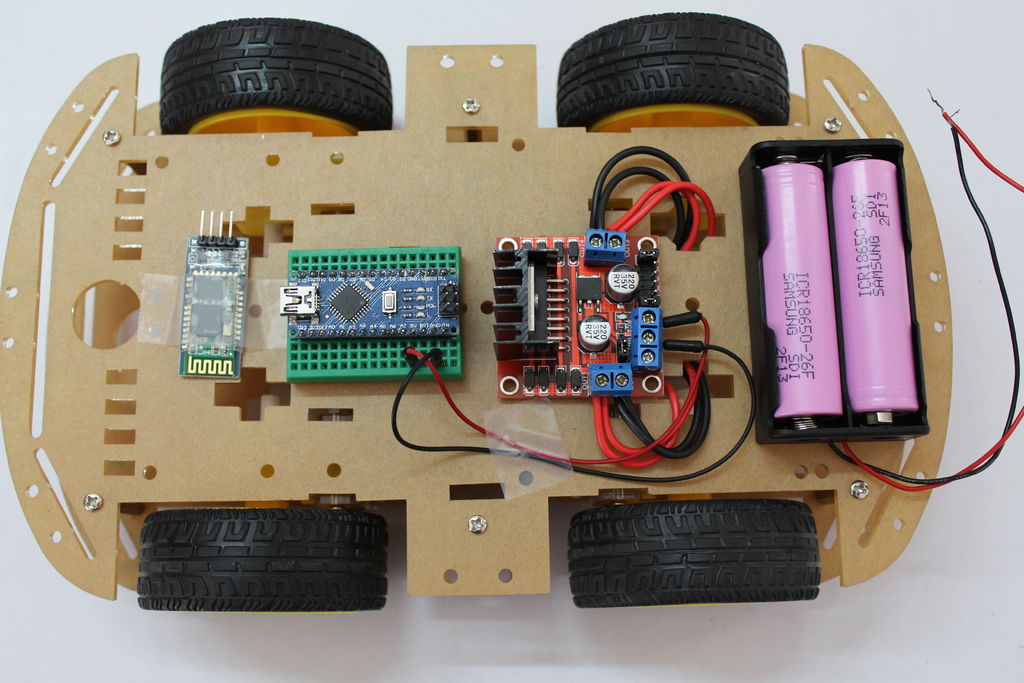
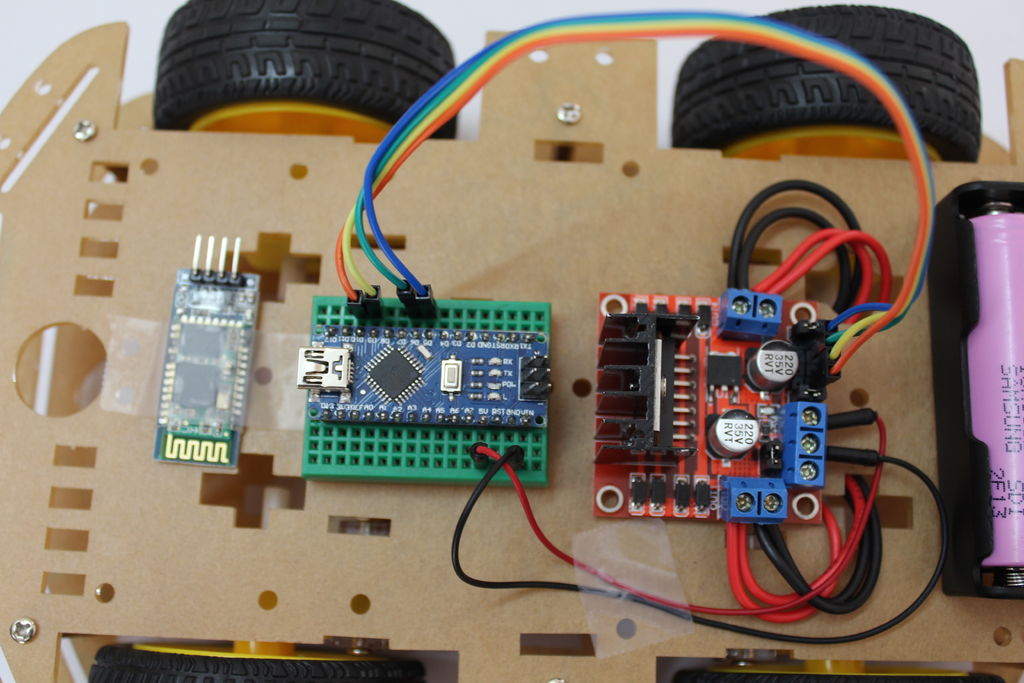
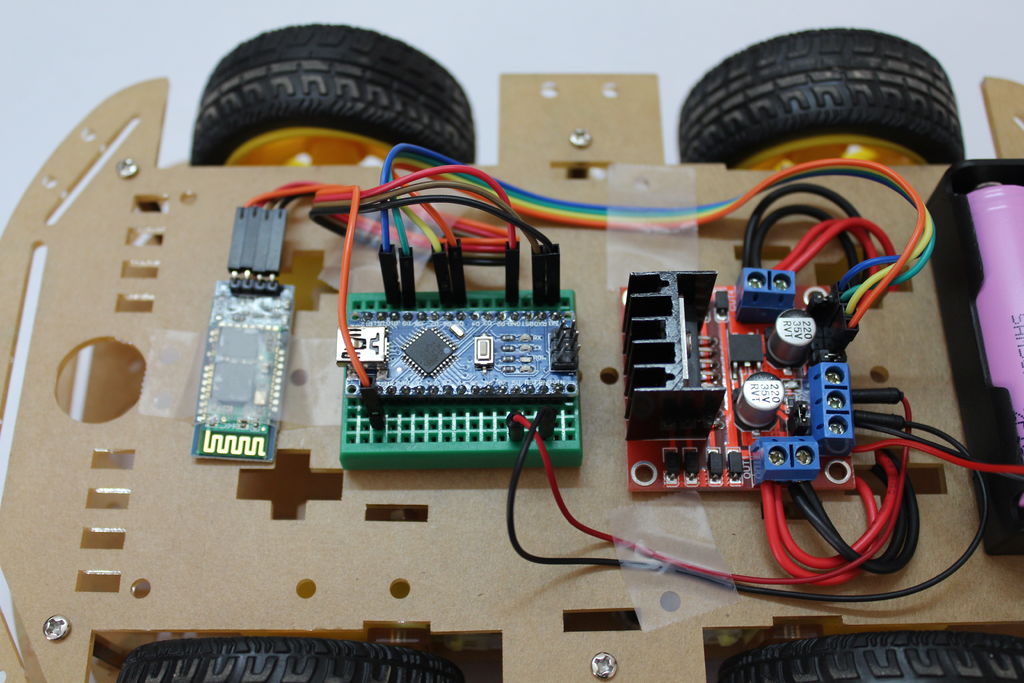
Для соединения модулей понадобятся провода с джамперами.
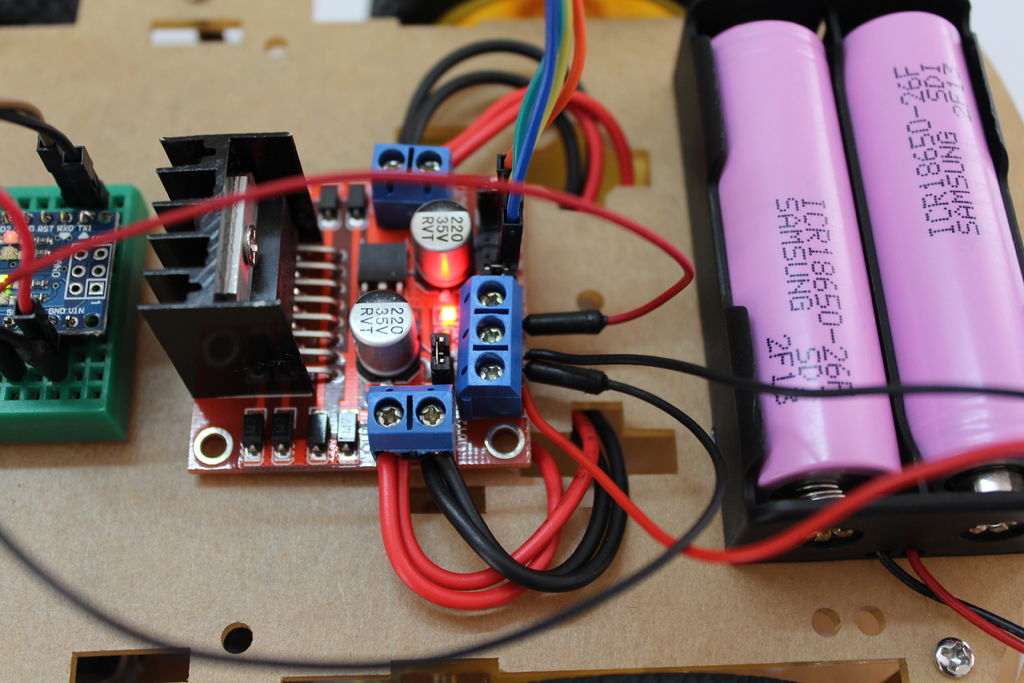
Соедините красные провода двух моторов вместе (на каждой стороне) и затем черные провода. В итоге у вас выйдет по две клеммы с каждой стороны.
MOTORA отвечает за два правых мотора, соответственно два левых мотора соединены с MOTORB.
Для соединения всех компонентов следуйте инструкции:
Шаг 14: Логика управления
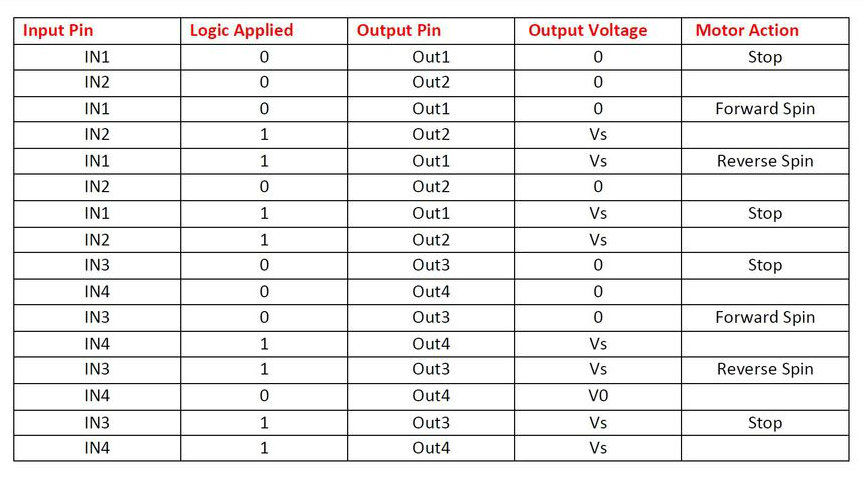
Чтобы понять принцип работы, я создал эту логическую таблицу. Она очень пригождается во время написания кода.
Шаг 15: Софт
Часть с фотом очень проста, она не требует никаких библиотек. Если вы поняли таблицу логики из прошлого шага, то сможете написать свой код. Я не тратил на код много времени и просто скопировал чей-то готовый вариант. Чтобы управлять роботом-машиной, я использую смартфон, соединённый с контроллером через модуль Bluetooth (HC-06).
Скачайте приложение. После его установки, свяжите телефон с модулем Bluetooth. Пароль «1234». Код Ардуино прикреплён ниже.
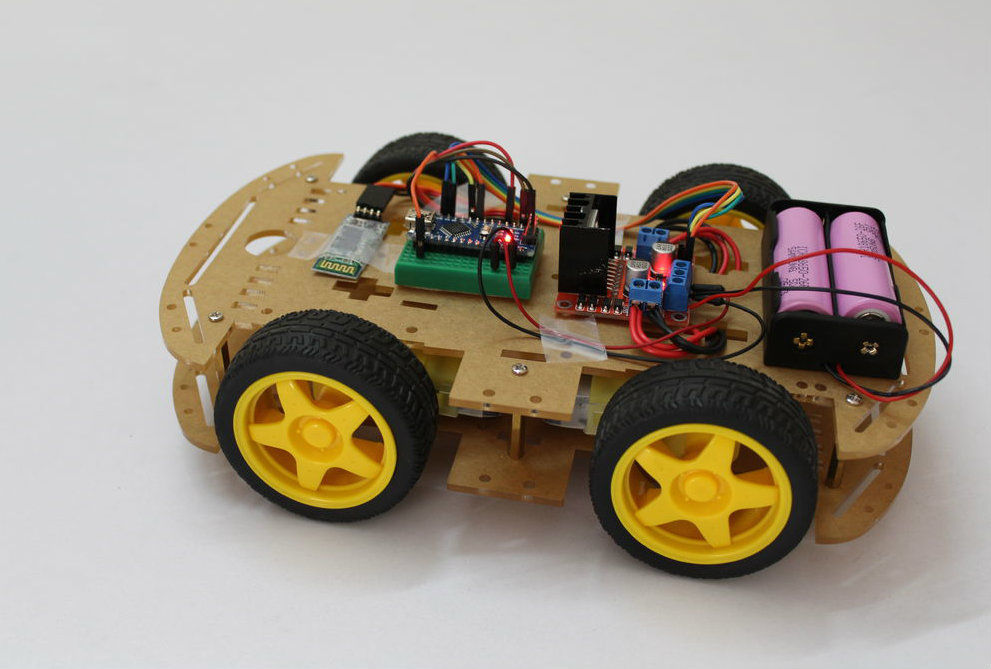
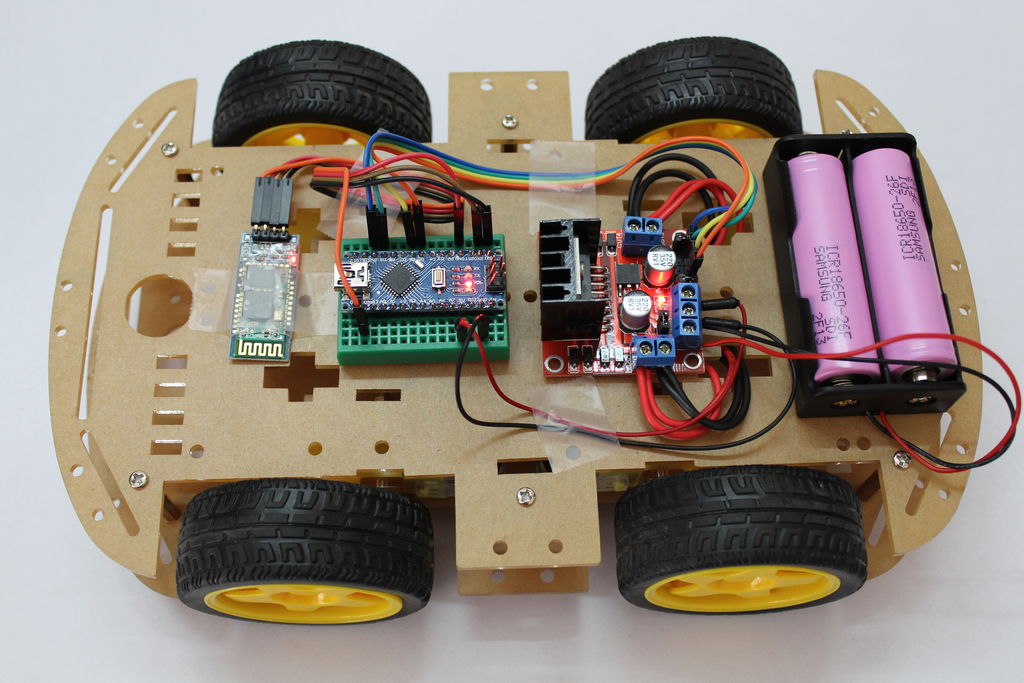
Шаг 16: Тестирование


Чтобы проверить робота-машину, я положил её на маленькую картонную коробку. Таким образом, колёса будут крутиться, но машинка будет оставаться на месте. Проверьте работоспособность, нажимая все доступные кнопки. Если всё работает, то можно по-настоящему управлять ей.
Заметка: если моторы вращаются в противоположном направлении, то просто поменяйте местами провода.
Шаг 17: Планы на будущее

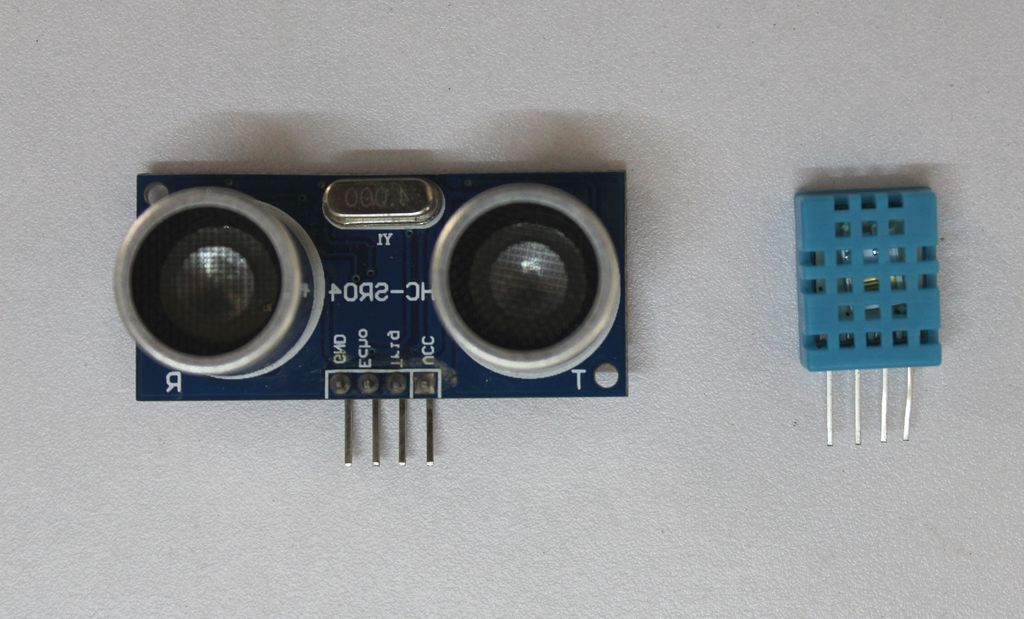
В этом руководстве я объяснил, как создать простенькую машинку. Дальше я хочу добавить в неё некоторые улучшения. Вы можете присоединить к ней различные датчики, вот некоторые идеи:
- Добавление ультразвукового датчика для объезда препятствий
- Использование модуля WiFi, например ESP8266 или Node MCU вместо Bluetooth, для удлинения дистанции управления.
- Добавление солнечной панели для зарядки батарей.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Читайте также: