
Коммутационная матрица коммутатора это
В этой статье мы расскажем, для решения каких задач подходят матричные коммутаторы, чем они отличаются от KVM-переключателей, какова база создания матрицы, а также разберем, как выбрать KVM-оборудование.
Что умеют матричные коммутаторы
Матричный коммутатор – это оборудование, которое умеет подключать удаленные рабочие места к серверам, входящим в матрицу, в настраиваемых комбинациях.
Коммутация происходит на аппаратном уровне. Пользователи подключаются к различным машинным комплексам, имеющим разъемы USB, PS/2, RS232 и т.д., с установленным программным обеспечением, стандартным или специализированным. Спектр подключаемых устройств огромен: от камер видеосъемки до автоматизированных станков на производствах.
Рис.1. Варианты переключения сигналов с матричным коммутатором 4x4
Подобные несложные системы возможно спроектировать и реализовать без участия KVM, например с применением виртуальных рабочих столов.
KVM-технологии и специализированное оборудование нужны тогда, когда требуется создать многофункциональную систему, способную адаптироваться к новым условиям. Этому способствует сам принцип работы KVM – функционирование на аппаратном уровне. Это значит, что на производительность системы не влияет ПО подключенного оборудования. Это важно в проектах, требующих специальное оборудование и специально написанные программы, например, в системах удаленного администрирования промышленными производственными установками.
Матричный коммутатор расширяет функционал матричной сети и позволяет системному администратору централизованно управлять всеми сеансами подключения, давая тому или иному пользователю сети определенные права на управление.
Благодаря матричной коммутации создаются многоуровневые матрицы, динамически конфигурируемые, с четким разграничением возможностей пользователей и администраторским управлением данными.
Матричный коммутатор и KVM-переключатель сигналов: в чем разница
Нередко даже специалисты в IT-сфере путают эти понятия, заменяя в обиходе одно понятие другим. Да, функции этих устройств похожи, и тем не менее их следует различать.
KVM-переключатель

Рис. 2. KVM-переключатель 8x32 NTI UNIMUX
Основная задача KVM-переключателя отражена в названии устройства. Аппарат переключает сигналы между удаленными рабочими станциями и серверами.
Среди моделей переключателей существуют устройства, по своим характеристикам приближенные к коммутаторам: они умеют давать доступ управления сессиями.
Матричный коммутатор
Матричные коммутаторы умеют переключать сигналы между системами и обеспечивать мультивещание. Это значит, система позволяет множеству специалистов подключиться к матрице, распределять сигналы различных типов между разными удаленными рабочими местами. Это актуально, когда, например, нужно вывести видеосигнал на одну удаленную консоль, а аудиосигнал – на вторую. Также администратор может координировать полномочия всех подключенных пользователей, настраивая многочисленные комбинации подключений.

Рис. 3. Мультивещательная система, созданная посредством технологии матричной коммутации. KVM-переключатель не подходит для решения этой задачи
Благодаря матричной коммутации один пользователь способен подключиться сразу к нескольким серверам. Переключение между ними осуществляется мгновенно благодаря настройке горячих клавиш или OSD-меню.
Передовые производители KVM-оборудования (британская Adder и немецкая IHSE) предлагают клиентам еще более совершенные технологии. Так, например, возможно так называемое «бесшовное» подключение, когда переключение между системами осуществляется простым передвижением курсора мыши на соседний монитор.
О FreeFlow, технологии производителя Adder, подробнее читайте здесь.
Как строится KVM-матрица (обзор основных принципов: KVM over IP и «точка – точка»)
Матричный коммутатор – это центральный аппарат, вокруг которого строится KVM-матрица. В систему входит и другое KVM-оборудование: удлинители сигналов видео, аудио, USB и др. Передатчики и приемники, составляющие KVM-удлинитель, подсоединяются к матричному коммутатору двумя способами. Первый – режим «точка – точка»: передатчик и приемник подключаются к матричному коммутатору так: трансмиттер ↔ матричный коммутатор ↔ ресивер. Второй способ подключения – по IP-сети (см. рис.4).

Рис. 4. Схема матричной коммутации KVM over IP на примере KVM-решения AdderLink INFINITY
Эти способы отличаются по наибольшей длине передачи сигнала. При подключении через кабель с помощью коаксиального кабеля можно передать сигнал на расстояние до 500 метров, витой пары – до 140 метров и оптоволоконному кабелю – до 10 км. При использовании второй модели KVM over IP лимита на наибольшую допустимую длину передачи сигнала нет.
Если матричная коммутация построена по принципу KVM over IP, можно настроить доступ к системе как в локальной сети, так и с выходом в глобальную сеть. В связи с этим в IT-сфере бытует миф о недостаточной надежности коммутации KVM over IP.
Развенчать этот миф довольно просто, если понять принцип в основе коммутации. В матрице, созданной посредством IP-сети, подключение осуществляется с помощью обычного сетевого коммутатора. В случае с системой KVM over IP эту роль берет на себя сервер управления, который также подключается к IP-сети с помощью сетевого коммутатора. Это значит, что безопасность сети целиком обусловлена настройками и защищенностью сетевого коммутатора. Матричная сеть бывает открытой и закрытой. Если настроить матрицу закрытого типа, то есть без прямого подключения к интернету, ее можно считать такой же надежной, как при кабельном подключении.
Принцип KVM over IP – более совершенная технология, если сравнить с кабельным подключением. И вот почему.
- Для создания матрицы KVM over IP не нужна кабельная инфраструктура, как при кабельном подключении, когда от любого из трансмиттеров или ресиверов сети к матричному коммутатору тянутся провода. Сеть KVM over IP требует только стандартную гигабитную сеть IP.
- Сети, построенные на KVM over IP, обладают большей гибкостью относительно традиционных. Их легко масштабировать, добавив еще один источник или комплект «приемник + передатчик», подключив таким образом нового пользователя. При масштабировании KVM-матрицы, построенной по принципу «точка – точка», возникает проблема лимита портов, а значит и максимального числа приемников и передатчиков. Если в определенный момент число пользователей, которых требуется подключить, перевалит за количество доступных портов, придется приобретать еще один матричный коммутатор.
- Для матриц, созданных на базе KVM over IP, не имеет значение расстояние от источника сигнала до пользователя. Без лишних затрат на кабели и их монтаж возможно сосредоточить все компьютерное оборудование в одном строении, а специалистов переместить в другое.
Рекомендации по выбору матричного коммутатора: на что обратить внимание
Очевидно, что матричный коммутатор является частью общей системы. Нужно учитывать запросы и особенности всей матрицы и возможности KVM-удлинителей сигнала.
Необходимые типы сигналов
Матрицы, в которых важна передача звуковых или видео сигналов, управляются AV-коммутаторами. Если же нужна дополнительная поддержка управления с удаленной рабочей станции, понадобится KVM-коммутатор.
AV-коммутаторы нужны для поддержки систем наблюдения или при организации цифровых вывесок, то есть там, где оператор не управляет системой, а только переключает сигналы и просматривает видео. Если источник сигнала располагается вблизи от экрана, куда выводится сигнал, AV-коммутация не требует даже KVM-удлинителей.
Наибольшее число подключенных аппаратов
Наибольшее число подключенных к KVM-матрице машин и удаленных рабочий станций ограничено или собственно коммутатором (при подключении «точка – точка»), или сервером (при выборе KVM over IP).
Матричные коммутаторы, предполагающие кабельное подключение, имеют статические или динамические порты.
Статические порты
Если в техническом описании к коммутатору указана характеристика в формате MxN, где M – число входов, N – число выходов.
Допустим, в описании есть информация 8х4. Это значит, что максимальное количество серверов или ПК равно 8, в допустимое число пользователей системы – 4. Больше 12 устройств подключить не получится.
Матричные коммутаторы с динамическими портами
Коммутаторы более современные предполагают большую гибкость в оснащении устройствами. В любой момент матрицы, построенные вокруг таких коммутаторов, можно масштабировать. Такие решения популярны в сфере среднего и крупного бизнеса, с прицелом на будущее.
Рассмотрим на примере. На рисунке 7 ниже – 30-портовый AdderView DDX30. Из тридцати портов семь статических. К ним можно подключить пользовательские устройства. Двадцать три остальных свободно могут быть использованы как для подсоединения машин, так и новых удаленных рабочих станций.


Рис. 5. Матричный коммутатор AdderView DDX30
Чтобы не ошибиться в выборе матричного коммутатора, необходимо просчитать варианты масштабирования матрицы на ближайшие несколько лет. Имейте в виду: если вы выберете коммутатор с несколькими статическими портами, через два года они могут «закончиться», то есть понадобятся больше машин или пользователей. Если такая ситуация возникла, поможет только приобретение и подключение к первому еще одного матричного коммутатора (каскадирование).

Рис. 6. Матричный коммутатор IHSE Draco tera Enterprise (до 576 динамических портов)
Некоторые коммутаторы предполагают масштабирование за счет настройки добавочных интерфейсных модулей. К примеру, в отдельных матричных коммутаторах немецкого производителя IHSE встроено до 576 портов. Да, масштабировать матрицу будет легко, но остро встает вопрос о целесообразности приобретения такого оборудования из-за дороговизны решения.
Отказоустойчивость
Отказоустойчивость – важная характеристика, определяющая надежность всей системы. Это целый комплекс из параметров, которые обязательно нужно изучить. Мы составили список вопросов, ответив на которые легко проанализировать выбранный вариант.
Параллельно с появлением архитектуры с разделяемой памятью (в середине 1990-х годов) была разработана архитектура на основе коммутационной матрицы (Crossbar architecture). Эта архитектура используется для построения коммутаторов различных типов.
Существует множество вариаций архитектуры этого типа. Базовая архитектура на основе коммутационной матрицы N х N непосредственно соединяет N входных портов с N выходными портами в виде матрицы. В местах пересечения проводников, соединяющих входы и выходы, находятся коммутирующие устройства, которыми управляет специальный контроллер. В каждый момент времени, анализируя адресную информацию, контроллер сообщает коммутирующим устройствам, какой выход должен быть подключен к какому входу. В том случае, если два входящих пакета от разных портов-источников будут переданы на один и тот же выходной порт, он будет заблокирован. Существуют различные подходы к решению этой проблемы: повышение производительности матрицы по сравнению с производительностью входных портов или использование буферов памяти и арбитров.
Несмотря на простой дизайн, одной из фундаментальных проблем архитектуры на основе коммутационной матрицы остается ее масштабируемость. При увеличении количества входов и выходов усложняется схемотехника матрицы и в особенности контроллера. Поэтому для построения многопортовых коммутационных матриц используется другой подход, который заключается в том, что простые коммутационные матрицы связываются между собой, образуя одну большую коммутационную матрицу.

Рис. 1.17. Архитектура на основе коммутационной матрицы
Можно выделить два типа коммутаторов на основе коммутационной матрицы:
- коммутаторы на основе коммутационной матрицы с буферизацией (buffered crossbar );
- коммутаторы на основе коммутационной матрицы с арбитражем ( arbitrated crossbar ).
Коммутаторы на основе коммутационной матрицы с буферизацией
В коммутаторах на основе коммутационной матрицы с буферизацией буферы расположены на трех основных стадиях: на входе и выходе и непосредственно на коммутационной матрице. Благодаря наличию очередей на трех стадиях эта архитектура позволяет избежать сложностей, связанных с реализацией механизма централизованного арбитража . На выходе каждой из стадий осуществляется управление очередями с помощью одного из алгоритмов диспетчеризации.
Несмотря на то, что эта архитектура является простейшей архитектурой коммутаторов, из-за независимости стадий для нее существуют сложности с реализацией качества обслуживания ( QoS ) в пределах коммутатора.
Коммутаторы на основе коммутационной матрицы с арбитражем
Эта архитектура характеризуется наличием безбуферных коммутирующих элементов и арбитра, который управляет передачей трафика между входами и выходами матрицы. Отсутствие буферов у коммутирующих элементов компенсируется наличием буферов входных и выходных портов. Обычно разработчики используют один из трех методов буферизации: выходные буферы, входные буферы, комбинированные входные и выходные буферы.
В коммутаторах с входными очередями (Input- Queued Switch) память каждого входного порта организована в виде очереди типа FIFO (First Input First Output — "первым пришел, первым ушел"), которая используется для буферизации пакетов перед началом процесса коммутации. Одной из проблем этого типа коммутационной матрицы является блокировка первым в очереди (Head-Of-Line blocking, HOL). Она возникает в том случае, когда коммутатор пытается одновременно передать пакеты из нескольких входных очередей на один выходной порт. При этом пакеты, находящиеся в начале этих очередей, блокируют все остальные пакеты, находящиеся за ними. Для принятия решения о том, какой пакет и из какой очереди может получить доступ к матрице, используется арбитр. Перед передачей пакета входные порты направляют арбитру запросы на подключение к разделяемому ресурсу (в данном случае — пути матрицы) и получают от него право на подключение.
Арбитр принимает решение о последовательности передачи пакетов из входных очередей на основе алгоритма диспетчеризации ( scheduling algorithm ).
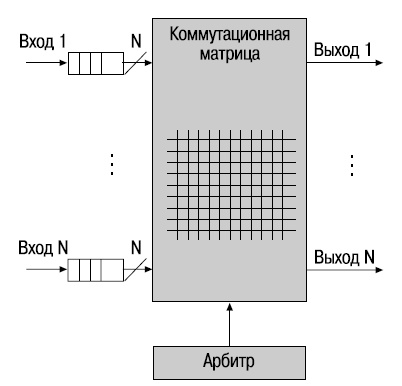
Рис. 1.18. Архитектура на основе коммутационной матрицы с входными очередями
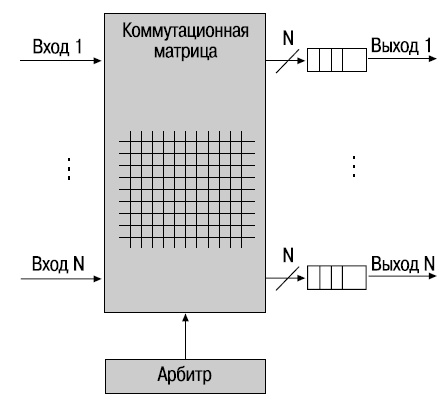
Рис. 1.19. Архитектура на основе коммутационной матрицы с выходными очередями
В коммутаторах с выходными очередями (output-queued switch) пакеты буферизируются только на выходных портах после завершения процесса коммутации. В этом случае удается избежать проблемы, связанной с блокированием очередей HOL . Коммутаторы этой архитектуры используют арбитр для управления временем, за которое пакеты коммутируются через матрицу. При правильно разработанном арбитре коммутаторы с выходными очередями могут обеспечивать качество обслуживания ( QoS ).
Следует отметить, что выходной буфер каждого порта требует большего объема памяти по сравнению с входным буфером. Это позволяет избежать блокирования на выходе, когда все входные порты пытаются подключиться к одному выходу. Еще одним важным фактором является скорость выполнения операции "запись" коммутируемых пакетов в выходную очередь. По этим двум причинам архитектура с выходными очередями должна быть реализована на высокоскоростных элементах, что делает ее очень дорогостоящей.
Коммутаторы с виртуальными очередями (Virtual Output Queues, VOQ) позволяют преодолеть проблему блокировки очередей HOL , не внося издержек по сравнению с коммутаторами с выходными очередями. В этой архитектуре память каждого входного порта организована в виде N (где N — количество выходных портов) логических очередей типа FIFO, по одной для каждого выходного порта. Эти очереди используются для буферизации пакетов, поступающих на входной порт и предназначенных для выходного порта j (j = 1,…N) .
В том случае, если существует несколько виртуальных очередей, может возникнуть проблема, связанная с одновременным доступом к коммутационной матрице и блокировкой очередей. Для решения этой проблемы используется арбитр, который на основе алгоритма диспетчеризации выбирает пакеты из разных очередей.
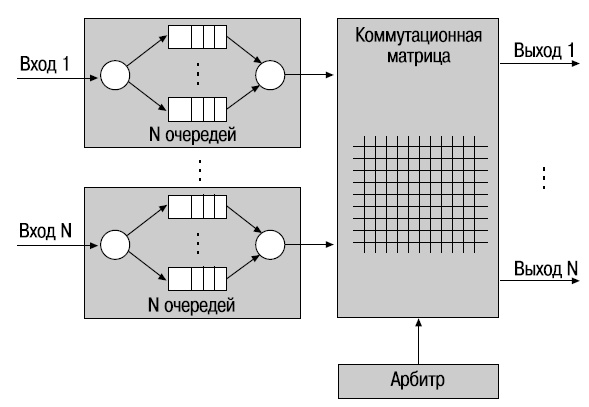
Рис. 1.20. Архитектура на основе коммутационной матрицы с виртуальными очередями
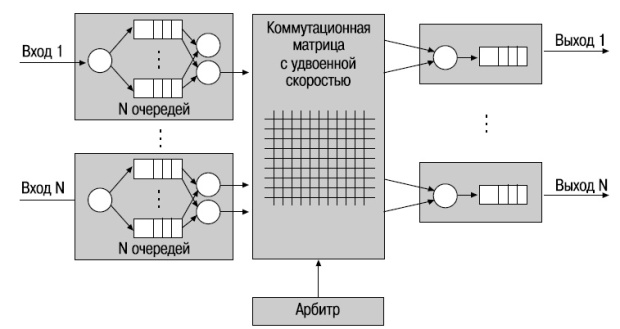
Рис. 1.21. Архитектура на основе коммутационной матрицы с CIOQ
Во временной слот 2, который называется стадией диспетчеризации, ячейки передаются из входных очередей в выходные. Последовательность передачи ячеек определяется централизованным арбитром с помощью алгоритма диспетчеризации. Для того чтобы выходные очереди быстро заполнялись пакетами из входных очередей (с целью уменьшения задержки передачи пакетов и обеспечения QoS ), алгоритм диспетчеризации должен обеспечивать циклическое высокоскоростное сопоставление входных и выходных очередей. Это сопоставление используется для настройки управляемых переключателей матрицы перед передачей пакетов с входов на выходы.
Во временной слот 3, который называется стадией передачи, осуществляется сборка пакетов и их передача с выходных портов.


Региональные представители:

Глава 41 : Коммутаторы (Свитчи)
Сегодня, как и раньше, среду передачи данных технологии Ethernet продолжают обвинять в ненадежности и низкой степени стабильности. Во многом это не далеко от истины, ведь алгоритм CSMA/CD остается неизменным при любых типах программных решений. Чтобы ликвидировать часть указанных недочетов в 1990 году была разработана технология коммутации сегментов Ethernet, предложенная фирмой Kalpana. Спустя несколько лет данную компанию приобрела корпорация Cisco. В результате применения этой технологии разделяемая среда больше не разграничивалась маршрутизаторами и мостами - она была полностью ликвидирована.
Такое изобретение не являлось принципиально логическим. Способ функционирования этой технологии основывался на труднодостижимом в то время принципе - одновременной обработке входящих кадров разными портами. Это означало то, что мосты обрабатывали кадр за кадром, последовательно. В результате коммутаторы Kalpana могли обрабатывать кадры между парой портов вне зависимости от других портов. Так идея отказа от разделяемой среды получила реальное воплощение.
Сущим везением для технологии Ethernet можно считать то, что появление коммутаторов опередило внедрение технологии АТМ. Выражалось оно в том, что у пользователей появилась хорошая альтернатива, которая давала возможность повысить качество сети без существенных финансовых затрат. Для реализации этого преимущества достаточно было просто заменить концентраторы коммутаторами, или же, в некоторых случаях, внедрить коммутаторы с целью разделения сегментов растущей сети. Таким образом, большое число уже применяемого оборудования конечных узлов, концентраторов, кабельных систем и повторителей не подлежало замене. В итоге происходила значительная экономия финансов, делающая переход на какую-нибудь новую технологию нерентабельным.
Маршрутизаторы не распознают протоколы сетевого уровня. Такой подход дал возможность не изменять главный принцип работы сетей между собой.
Укажем так же, что на рост популярности коммутаторов оказала влияние легкость их установки и простата настройки. Данное устройство относится к категории "самообучающихся", что позволяет отказаться от его конфигурирования. Для его работы достаточно просто грамотно подключить кабельную систему к свитчу. Дальнейшее его функционирование может происходить без контроля со стороны администратора сети без потери в качестве выполнения поставленных задач.
Как и ранее на сегодняшний день коммутаторы остаются самым универсальным, удобным и мощным классом оборудования для ЛВС. В одной из простейших своих вариаций устройство является многопортовым мостом Ethernet. Однако технический прогресс оставил свой отпечаток и на этом оборудовании - его свойства значительно изменились и дополнились. В результате главный принцип работы и назначение коммутаторов стало весьма сложно разглядеть среди этих дополнений.
Техническая реализация коммутаторов.
С технической точки зрения принцип работы коммутатора не очень сложен. Объяснить его можно следующим образом: входящий кадр сначала попадает в source port, а затем направляется destination port. При этом активный портом, принявшив кадр, будет только тот, к которому подсоединено устройство с МАС-адресом, совпадающим с адресом назначения полученного кадра.Таким образом, первая задача, которую решает данная технология - это соответствие MAC-адресов портов коммутатора подключенным устройствам. Для этих целей коммутатор формирует специальную таблицу соответствия - САМ (content-addressable memory). Данная таблица появляется в течение процесса самообучения коммутатора. Принцип ее создания будет следующим: когда порт получает отзыв от устройства с физическим адресом Х, он заносит в content-addressable memory запись об этом соответствии.
При поступлении кадра с адресом, указанном в такой таблице, он отправляется на соответствующий порт. Если кадр был предназначен для всех узлов или адрес пункта назначения коммутатору еще не известен, то такой кадр попадает на все активные порты. На протяжении рабочего периода подключенного оборудования его физический адрес может измениться. В таком случае коммутатор делает новую запись в таблице. В случае отсутствия места для новой записи происходи стирание самой старой записи - работает принцип вытеснения.
Если какие-то из записей не используются длительное время, они автоматически стираются. Этот подход освобождает место в таблице САМ и, таким образом, увеличивается скорость выборки нужного адресата.
Стоит заметить, что такой жесткий подход используется только в неуправляемых коммутаторах Dumb. Dumb - это простое и не дорогое сетевое оборудование. Такие коммутаторы практически полностью сместили хабы в несложных сетях. Обычно эти модели обладают средними техническими параметрами, имеют небольшое число портов, в них отсутствует возможность управления со стороны администратора.
На порядок выше, в техническом плане, стоят настраиваемые коммутаторы - Smart. Данная модель дает возможность администратору сети изменять важные настройки работы порта. Для этих целей может использоваться микро-клавиатура, Ethernet или порт RS-232. Внесенные изменения считываются при загрузке и только один раз. Обычно изменение в конфигурации необходимо чтобы отключить возможность коммутатора самостоятельно составлять статическую таблицу соответствия портов МАС-адресам. Эту функцию применяют так же для установки фильтров, назначения скорости и других целей.
Лидером по числу дополнительных возможностей среди коммутаторов является управляемые Intelligent. Эти модели обладают собственной памятью и управлять ими можно с помощью компьютера. Изменение параметров и контроль над этими устройствами происходит без перезагрузки. Данная модель позволяет отслеживать проходящие пакеты, измерять трафик и прочее.
Здесь стоит указать на то, что последний рассмотренный вид коммутатора значительно дороже предыдущих, но принцип его работы тот же. К каждому из узлов подведен отдельный канал со своей полосой пропускания (но это только в том случае, если нет одновременного обращения нескольких устройств к данному). В таких условиях узлы имеют возможность функционировать не зависимо друг от друга. Опасность для сети, организованной с помощью этого оборудования, представляют "бродкастовые" штормы. "Бродкастовый" шторм - это лавинообразно растущая перегрузка сети широковещательными кадрами. Но и эта проблема вполне разрешима: управляемые коммутаторы позволяют разделить одну крупную сеть на несколько виртуальных подсетей. Кроме того, возникновение такого шторма возможно только в очень крупных компьютерных сетях.
Теперь становится отчетливо видно, что основные свойства и ограничения разделяемой среды передачи данных Ethernet не могут быть применимы к сетям, организованным с помощью коммутаторов. Ведь в таких сетях нет коллизий, нет ограничений на количества подключенных устройств и максимальной длины линии.
К примеру, на практике могут применяться линии из оптического волокна, протяженностью в сотни километров, по которым передаются кадры Ethernet. В тоже время локальные сети позволяют объединить тысячи работающих серверов или станций.
Классификация коммутаторов.
Чтобы процессор коммутатора определил порт назначения для кадра Ethernet, он должен иметь доступ к его заголовку. Эта информация попадает в буфер. На этом основании коммутаторы разделяют по способу продвижения кадра:1. cut-through - на лету;
2. Store-and-Forward - с буферизаций.
При первом способе коммутации (на лету) входящие кадры не направляются в быфер целиком. Помещение их в буфер целиком происходит только в ситуации, когда занята шина или порт, а так же если необходимо согласовать скорости передачи. В результате при больших размерах трафика основная часть данных будет подлежать буферизации в различной степени.
Проще говоря, коммутатор "смотрит" только на адрес пункта назначения пакета в его заголовке, а затем сверяет его с САМ-таблицей. Далее, согласно таблице, он отправляет кадр в нужный порт. Сверка с таблицей занимает от 10 до 40 мкс. К числу обычных относится ситуация, когда кадр еще полностью не был передан на входящий порт, но его заголовок уже начал передаваться через выходящий.
При втором методе - Store-and-Forward (полной буферизации) каждый кадр подлежит полной записи, и только после этого процессор порта передает его или отфильтровывает. Такой способ продвижения кадра имеет отрицательную сторону - время задержки достаточно велико. К положительным сторонам относятся поддержка разнородных сетей и уничтожение испорченного кадра. Основная масса современных коммутаторов работает именно по этому второму принципу.
Существует ряд еще более сложных моделей, которые могут автоматически адаптироваться (изменять механизм работы). На то какой режим стоит применять в той или иной ситуации влияет ряд факторов, среди которых, например, объем трафика и масса испорченных кадров.
Кроме описанной выше классификации коммутаторов их так же делят по виду внутренней логической архитектуры:
1. коммутационная матрица;
2. многовходовая разделяемая память;
3. общая шина.
Коммутационная матрица.
Это был самый скоростной промышленный коммутатор. Принцип работы состоит в следующем: вначале процессор порта анализирует заголовок поступившего кадра, затем в этот заголовок добавляется номер порта назначения, который определяется согласно таблице коммутации. После этого кадр оказывался в двухмерной матрице логических переключателей. Управляли этими переключателями определенные биты из номера порта назначения.Сама коммутационная матрица устанавливала путь следования до нужного порта. Таким образом, если это было возможно, кадр попадал в нужный порт, последовательно пройдя через ряд переключателей.
Если на момент поступления кадра нужный порт был занят, то он останавливался в буфере входного порта. Тем временем коммутационная матрица создавала новый путь, который ожидал процессор.
Здесь нужно обратить внимание на одну особенность таких коммутаторов - этот вид коммутирует физические каналы. При таком подходе если возникает ситуация, когда на один и тот же порт попадают несколько кадров одновременно, то пройти переключатель матрицы они смогут только последовательно. Еще один недостаток таких коммутаторов - чем больше портов, тем выше сложность. Другими словами - такое решение плохо масштабируемо. В результате сейчас оно почти не применяется на практике.
Многовходовая разделяемая память.
В этом виде коммутаторов входные и выходные блоки соединяются через общую память. Подключением к блокам памяти занимается менеджер очередей выходных портов. Данный менеджер так же формирует в памяти очереди данных, число которых равно числу портов. Тем временем входные блоки посылают менеджеру запросы на запись данных в определенную очередь для соответствующего исходящего порта.
Использование такого подхода предполагает наличие очень дорогой и быстродействующей памяти, а сама система получается достаточно сложной. Ее преимущества не достаточно весомы, по сравнению с гораздо более дешевой шинной архитектурой. В итоге, как и предыдущий вид, эти коммутаторы не нашли широкого применения.
Архитектура с общей шиной.
В данном случае процессоры портов связываются одной шиной. Чтобы система имела высокие показатели производительности, ее скорость должна быть выше скорости поступления кадров в порт коммутатора (примерно в C/2 раза, где C это сумма скоростей всех портов).

Коммутация с использованием общей шины
Кроме скорости большое значение имеет сам способ передачи кадров по шине. Здесь очевидно то, что передавать кадр сразу полностью не эффективно. Связано это с тем, что во время данного процесса все остальные порты будут простаивать. Для ликвидации такого ограничения используется метод, схожий с АТМ. Суть его в следующем: сначала кадр разбивается на блоки, длиной в несколько десятков байт, а потом эти части передаются "почти" параллельно сразу нескольким портам.
Другими словами этот подход использует метод временной коммутации частей кадров (ячеек, как в АТМ). Такие системы надежны и легко масштабируемы. Описанные преимущества обеспечили данной архитектуре лидирующие позиции на рынке подобных устройств.
Следующий признак, согласно которому коммутаторы можно условно разделить на группы - это область применения:
1. настольные коммутаторы;
2. коммутаторы для рабочих групп
3. магистральные коммутаторы
Коммутаторы для рабочих групп.
Коммутаторы данного типа служат для объединения в единую сеть настольных коммутаторов (или концентраторов 10/100Base-T) с ее дальнейшим подключением к магистральной СПД. Чтобы выполнять данные функции разрабатывается специальная большая таблица маршрутизации, насчитывающая нескольких десятков тысяч MAC-адресов на коммутатор. Кроме того необходимы эффективные средства мониторинга трафика, фильтрации и построения виртуальных сетей. В таких системах обязательна возможность удаленного управления. Здесь так же распространен протокол SNMP.
Эти коммутаторы обычно включают порты 1000baseT либо условия для создания транковых соединений. Порты 1000baseT служат для подключения серверов или соединения нескольких свитчей между собой. Так же используются встроенные модули для оптического волокна и прочие конвертеры физических сред.
Цена такого решения составляет $30-100 за один порт 10/100baseT. Более дешевые модели это Surecom EP-716X и SVEC FD1310. Самые популярные и более дорогие модели это 3com 4400 и Cisco 2950.
Магистральные коммутаторы.
Предназначены для объединения ЛВС в сети передачи данных. Чаще всего имеют модульное исполнение, сложную и мощную конструкцию. Обладают рядом дополнительных возможностей настройки, которая может включать маршрутизацию на III уровне по модели OSI. Так же эти коммутаторы могут содержать резервные источники питания, поддерживать приоритезацию и протоколы Spanning Tree, 802.1q.
Цена на такие магистральные коммутаторы в расчете на один порт колеблется в пределах от 100$ до 1000$. Самым популярным оборудованием этого класса являются тяжелые коммутаторы серии Cisco Catalyst.

В статье рассматриваются основные типы коммутационных матриц, описываются их особенности, и приводятся ключевые параметры.
Коммутационные матрицы позволяют избавиться от необходимости перек лючать соединения вручную с помощью управляющих сигналов. Помимо удобства обеспечивается высокая скорость переключения. Матрицы коммутаторов применяются в произ- водственном оборудовании для подключения контрольно-измерительной аппаратуры, в частности, генераторов сигнала, анализаторов спектра, сетевых анализаторов, измерителей мощности к испытуемому устройству. Они также служат для создания альтернативных трактов прохождения сигнала для повышения надежности оборудования, например на участке между антенной и приемником. Наконец, в лабораториях с их помощью осуществляется разделение и распределение сигналов по нескольким цепям, а также создание нескольких трактов с разными характеристиками, такими как задержка, частотный отклик, ослабление.
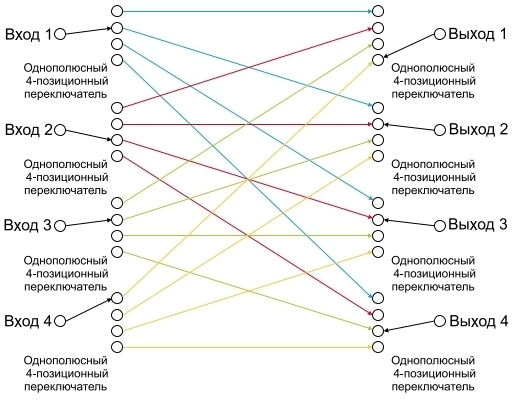
Возможные комбинации переключений в блокирующей матрице 4×4
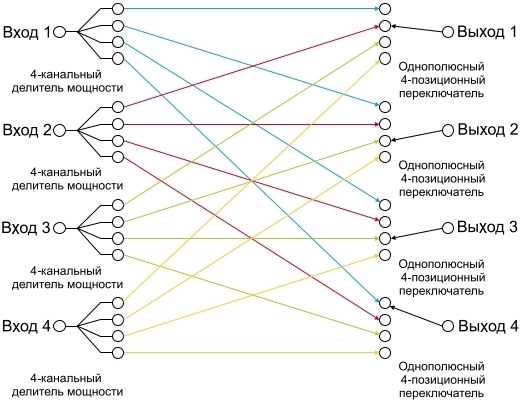
Возможные комбинации переключений неблокирующей матрици 4×4
Разделяют три основных типа матриц , обеспечивающих разную функциональность: блокирующие, неблокирующие, неблокирующие суперматрицы. Они обозначаются N×M, где N – количество входов, М – количество выходов. Например, матрица 4×4 имеет четыре входа и четыре выхода. Размеры матрицы находятся в диапазоне 1×2…256×256.
Блокирующая матрица позволяет подсоединять вход к любому из выходов. В любой момент времени каждый вход может подключиться только к одному из выходов.
В блокирующей матрице количество активных соединений ограничено количеством входов и или выходов в зависимости от того, какое из них меньше. Например, в матрице 1×4 активно только одно соединение. На рисунке 1 показаны возможные комбинации в матрице 4×4. Эту матрицу можно реализовать с помощью восьми однополюсных четырехпозиционных коммутаторов и 16 соединительных кабелей.
Из рисунка 1 видно, что одновременно обеспечивается не более четырех соединений. В каждый момент времени каждый вход может подключиться только к одному выходу, и наоборот.
Матрицы второго типа позволяют подключать вход к нескольким выходам одновременно; при этом каждый выход можно соединить только с одним входом. Для обеспечения такой возможности на входах устанавливается делитель мощности, расщепляющий сигнал.
На рисунке 2 показаны возможные соединения в неблокирующей матрице 4×4. В ней используются четыре делителя мощности с четырьмя выходами, четыре однополюсных 4-позиционных коммутатора и 16 соединительных кабелей. заметим, что амплитуда сигналов после разделения уменьшается.
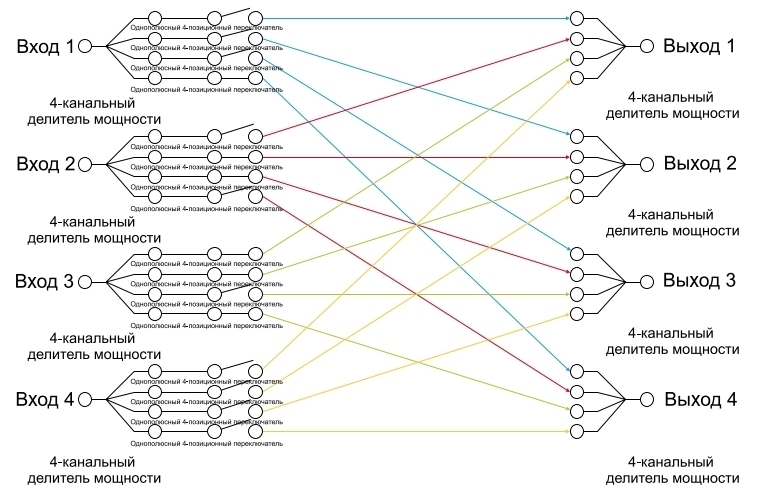
Возможные комбинации переключений в неблокирующей суперматрице 4×4
Наконец, матрицы третьего типа позволяют подключать любой вход к любому выходу без ограничений. Как и в случае неблокирующей матрицы, входной сигнал расщепляется. При этом на выходах используется сумматор. На рисунке 3 показана суперматрица 4×4. В ней используются восемь делителей мощности с четырьмя выходами (четыре – на входе, четыре – на выходе в качестве сумматора), 16 однополюсных 4-позиционных коммутаторов и 16 сое- динительных кабелей. Из-за дополни- тельных устройств выходной сигнал слабее входного.
Основными параметрами коммутационных матриц являются рабочая частота, вносимые потери, развязка, время переключения, уровень мощности. Рассмотрим их подробнее.
Частотный диапазон сигнала, который поступает с входа на выход матрицы, является ее частотным диапазоном. Матрицы могут быть не только широкополосными, функционируя, например, в диапазоне 0 Гц…40 ГГц, так и узкополосными с диапазоном 2,4–2,5 ГГц. Чем шире полоса, тем дороже матрица. заметим, что коммутаторы не всех типов предназначены для работы на низких частотах, что, в свою очередь, может повлиять на другие параметры, например на скорость переключения и вносимые потери.
Вносимые потери коммутационной матрицы – это та часть мощности РЧ-сигнала, которая теряется при прохождении от входа до выхода. Она измеряется в дБ. Все устройства, через которые проходит сигнал, в т. ч. проводники, рассеивают мощность. Вносимые потери у неблокирующей матрицы и суперматрицы выше, поскольку в них используется больше компонентов.
Требуемая полоса пропускания влияет на вносимые потери: чем она шире, тем больше потери. Чем ниже рабочий диапазон частот, тем выше потери, если не приняты меры по их уменьшению. Так, внутри матрицы можно установить усилители для повышения уровня сигнала и уменьшения вносимых потерь. Однако они не могут применяться в двунаправ- ленных матрицах, где сигнал распространяется не только от входа к выходу, но и с выхода на вход.
Развязка – это мера потери мощности сигнала при разомкнутой цепи, когда отсутствует прямая передача между портами. Развязка измеряется между входами, входом и выходом, между выходами. Чем она выше, тем лучше. В некоторых схемах требуется очень высокая развязка во избежание утечек сигнала и не интерференции.
Время, которое требуется для отключения матрицы от одной цепи и подключения к другой, называется временем переключения. Оно измеряется с помощью управляющего сигнала, дающего команду на изменение состояния матрицы. Время, требующееся для изменения РЧ-сигнала с уровня 10% до 90% от конечного напряжения, является временем переключения (см. рис. 4). При переключении управляющий сигнал следует обработать, а все требуемые коммутаторы – установить в требуемое положение. Этот параметр определяется, главным образом, задержками в управляющем контуре матрицы, а также характеристиками коммутаторов.
При этом тип коммутатора имеет огромное значение. Механические переключатели, к которым относятся коаксиальные реле или коммутаторы на волноводах, являются самыми медленными – их время переключения составляет десятки миллисекунд. Коммутаторы на pin-диодах и полевых ключах – самые быстродействующие: время их переключения исчисляется десятками наносекунд. Если требуется обеспечить максимально быстрое переключение, то этот параметр определяет все остальные характеристики при выборе матрицы.
Как упоминалось, метод управления матрицей также влияет на время переключения. Например, если управляющий сигнал обеспечивается через сетевое соединение, учитывается его время прохождения по сети, а также время, требуемое контроллером внутри матрицы на прием и декодирование управляющего сигнала. В матрицах с максимально коротким временем переключения необходима подача управляющего сигнала напрямую с малой задержкой. В приложениях, в которых востребована предварительно установленная последовательность переключений на высокой скорости, загружается программа, подающая одиночные команды на переключение.
Читайте также: