
Тип данных word modbus
В предыдущей статье мы соединили открытую платформу домашней автоматизации OpenHAB с контроллером Arduino использовав очень простой, текстовый протокол. Но это решение поставит нас в тупик, если мы захотим подключить наш контроллер к другой системе, что же делать?
Modbus — самый известный и распространенный стандарт в промышленной автоматизации, его поддерживают миллионы устройств по всему миру, эти устройства легко интегрируется в единую сеть и стыкуются с огромным количеством готового программного обеспечения. Попробуем использовать его в нашем проекте?
Что нам необходимо знать об этом стандарте?
Протокол Modbus использует последовательные линии связи (например, RS232, RS485), а протокол Modbus TCP рассчитан на передачу данных по сетям TCP/IP.
Протокол Modbus имеет два режима передачи RTU и ASCII, в режиме ASCII каждый байт передается как два ASCII символа его шестнадцатеричного представления.
В сети Modbus есть только один ведущий, который с заданным интервалом опрашивает несколько ведомых устройств, каждое из которых имеет свой уникальный адрес от 1 до 254, адрес 0 широковещательный и на него отвечают все устройства, так как ведущий в сети один у него нет своего адреса.
В спецификации Modbus определено два типа данных, один бит и 16 битное слово. Данные организованны в четыре таблицы с 16 битной адресацией ячеек, адресация в таблицах начинается с 0. Для доступа к данным из разных таблиц предназначены отдельные команды.
| Discrete Inputs | 1 бит | только чтение |
| Coils | 1 бит | чтение и запись |
| Input Registers | 16 бит | только чтение |
| Holding Registers | 16 бит | чтение и запись |
Как нам подключить Modbus устройство к OpenHAB? За это отвечает модуль Modbus Tcp Binding, этот модуль работает в режиме ведущего и обеспечивает подключение нескольких ведомых устройств через последовательный порт или TCP/IP сеть.
Для того чтобы связать с ним Arduino нам необходимо реализовать в контроллере ведомое Modbus устройство, воспользуемся для этого библиотекой Modbus-Master-Slave-for-Arduino.
Скачаем библиотеку и создадим скетч, скопировав следующий код в редактор программ. При желании можно просто скачать проект с необходимыми файлами из репозитория.
Рассмотрим на примере нашего скетча основные шаги необходимые для работы с этой библиотекой.
Все функции библиотеки реализованы в одном файле ModbusRtu.h.
Для взаимодействия с ней, в программе нужно создать объект, задав в его конструкторе Modbus адрес, номер последовательного порта, номер выхода, управляющего передачей (для RS485)
Затем определить массив регистров Modbus
После этого, при старте программы настроить последовательный порт ведомого
И после этого можно обработать полученные данные и сохранить необходимые переменные в регистрах Modbus.
Стандарт предусматривает отдельную таблицу для каждого типа данных, но особенностью применённой библиотеки является то, что все регистры хранятся в одном массиве в виде перекрывающихся таблиц, поэтому структура регистров контроллера будет выглядеть следующим образом:
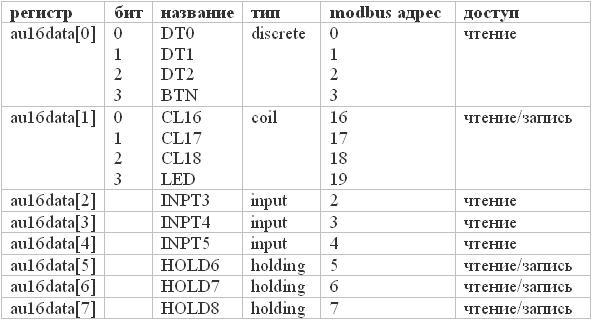
Для демонстрации работы с разными регистрами, в процессе работы программы данные из регистра с типом coil будут скопированы в регистр с типом discrete, а из регистров с типом holding в регистры с типом input. Кроме этого состояние кнопки будет сохранено в третий бит регистра au16data[0] (discrete), а значение третьего бита регистра au16data[1] (coil) выведено на светодиод.
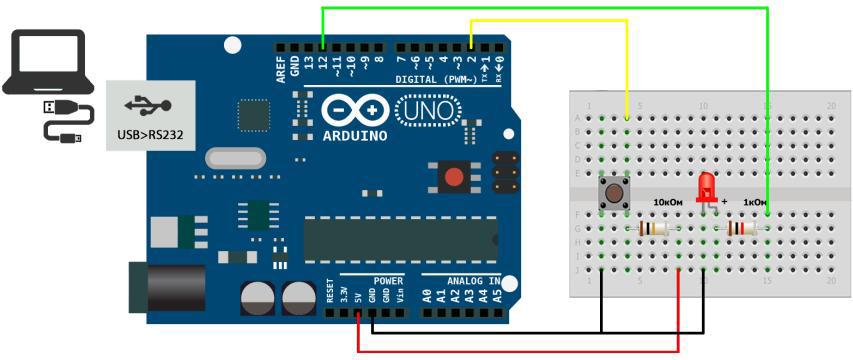
Доработаем макет контроллера, который был собран для предыдущих экспериментов, переключим светодиод с 13 на 12 вывод. Обычно на плате самого Arduino уже есть светодиод, подключенный к 13 выводу, в нашей программе он станет индикатором статуса работы. Теперь подключим USB кабель к компьютеру, скомпилируем и загрузим программу в контроллер.
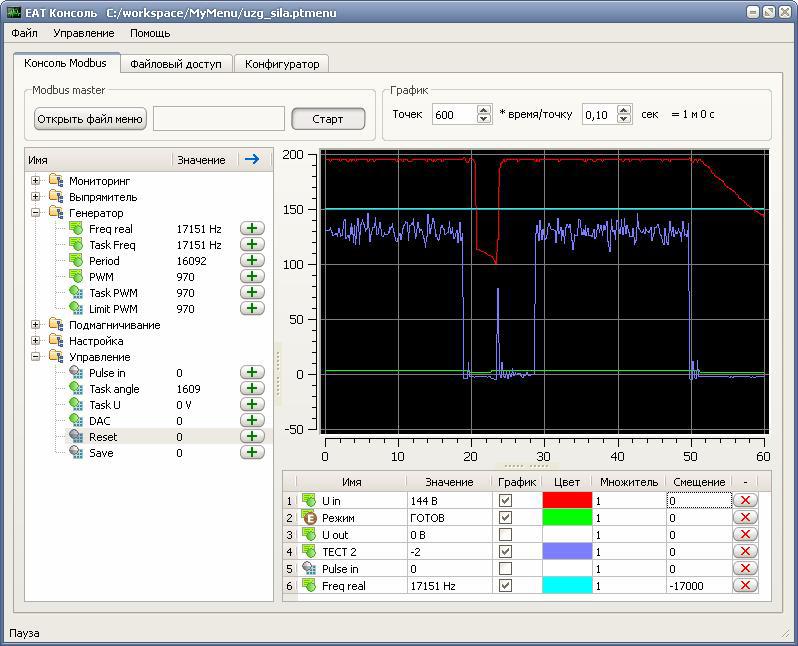
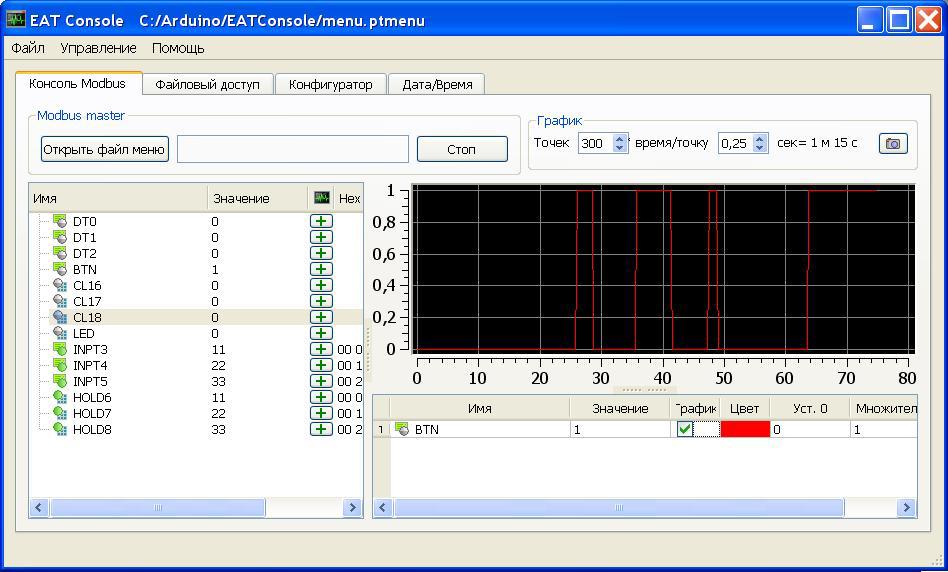
Среди них можно отметить утилиту EAT-Console которая позволяет не только управлять и опрашивать Modbus устройства, но и отображает данные в графическом виде, что очень удобно при отладке работы с различными датчиками, например датчиками влажности, давления и температуры. Перед началом работы с программой и её конфигуратором рекомендую ознакомиться с документацией.
Для установки эмулятора нужно скачать архив и распаковать его в папку C:\arduino\EATConsole, затем открыть страницу загрузки Eclipse, скачать Eclipse IDE for Java Developers и распаковать его в папку C:\arduino\eclipse, после этого скопировать файлы из папки C:\arduino\EATConsole\eclipse\plugins в папку C:\arduino\eclipse\plugins.
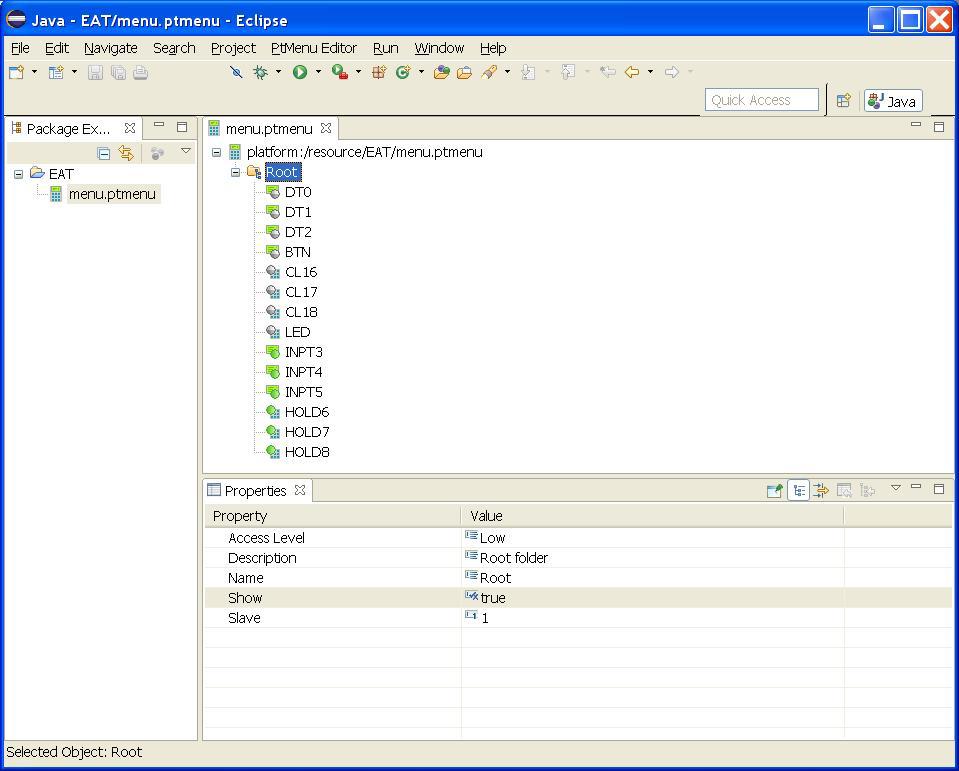
Для создания конфигурации необходимо запустить C:\arduino\eclipse\eclipse.exe, создать пустой проект, скопировать в него пустой файл C:\arduino\EATConsole\menu.ptmenu и добавить в редакторе пункты в соответствии со следующей таблицей. Если же вы скачали проект из репозитория, то в нём, в папке EATConsole уже есть подготовленный файл menu.ptmenu.
| Type | Address | Bit | Name | Point | Slave |
| Display Boolean | 0 | 0 | DT0 | 1 | |
| Display Boolean | 0 | 1 | DT1 | 1 | |
| Display Boolean | 0 | 2 | DT2 | 1 | |
| Display Boolean | 0 | 3 | BTN | 1 | |
| Input Boolean | 1 | 0 | CL16 | 1 | |
| Input Boolean | 1 | 1 | CL17 | 1 | |
| Input Boolean | 1 | 2 | CL18 | 1 | |
| Input Boolean | 1 | 3 | LED | 1 | |
| Display Integer | 2 | INPT3 | 0 | 1 | |
| Display Integer | 3 | INPT4 | 0 | 1 | |
| Display Integer | 4 | INPT5 | 0 | 1 | |
| Display Integer | 5 | HOLD6 | 0 | 1 | |
| Display Integer | 6 | HOLD7 | 0 | 1 | |
| Display Integer | 7 | HOLD8 | 0 | 1 |
Type — тип элемента меню EATConsole.
Address — адрес регистра данных.
Bit – номер бита в регистре.
Name – название элемента меню.
Point – количество десятичных знаков после точки.
Slave – Modbus адрес контроллера.
Теперь сохраним и скопируем файл menu.ptmenu в каталог C:\arduino\EATConsole, для этого можно щёлкнуть правой кнопкой мыши на файле прямо в Eclipse, выбрать в контекстном меню пункт “Copy”, а затем вставить в проводнике в папку C:\arduino\EATConsole.
После этого запустим C:\arduino\EATConsole\EATConsole.exe, настроим последовательное соединение, выбрав пункт меню Файл\Настройки, в диалоговом окне укажем номер порта, скорость 9600, 8 бит данных, 1 стоповый бит.
*Программа работает с портами с 1 по 8 и если USB переходник Arduino встал на порт с большим номером, придётся открыть диспетчер устройств Windows и изменить номер порта для него.
Попробуем поменять значение в регистрах HLD0…HLD2 и СL0…СL2, при этом должно поменяться значение в соответствующем регистре IN0..IN2 и DT0..DT2, затем нажмём на кнопку макета, при этом должно поменяться значение в поле BTN, щёлкнем по полю LED, при этом должен загореться или потухнуть светодиод.
Что мы получили в результате нашей работы:
1 познакомились с азами протокола Modbus;
2 создали скетч, который превращает Arduino в Modbus slave устройство и позволяет читать и записывать несколько Modbus регистров с разными типами данных;
3 протестировали обмен с контроллером при помощи эмулятора функций Modbus master устройства, для которого создали конфигурацию соответствующую структуре регистров контроллера.
Выводы
Библиотека Modbus-Master-Slave-for-Arduino проста в использовании, позволяет создать ведомое Modbus устройство, которое корректно работает с программным эмулятором. Скомпилированный пример занимает немногим более 5кб памяти программ, так что в контроллере остаётся достаточно места для добавления необходимого функционала.
Стандарт Modbus открыт и популярен, но в нём есть ряд недостатков — в стандарте определено только два типа данных,
протокол требует постоянного обмена между ведущим и ведомыми устройствами, конфигурировать систему приходится вручную.
Имея некоторые недостатки, протокол вполне пригоден для использования в контроллере систем домашней автоматизации, особенно если необходима стыковка с различным программным обеспечением.

Modbus узел является контейнером для Modbus переменных, с помощью которых происходит опрос Modbus устройств. Для добавления нового Modbus узла необходимо выделить узел-родитель в ветке «Текущие переменные». Затем либо правой кнопкой мыши вызвав контекстное меню выбрать пункт «Добавить узел», либо на панели управления нажать кнопку . Каждый узел внутри своей ветви должен иметь уникальное имя.

- «Имя узла» – имя узла;
- «Описание» – описание узла;
- «Подключение» – тип подключения для работы в Master режиме. Может быть прямое, модемное или TCP подключение. После выбора типа подключения можно настроить настройки подключения нажав кнопку "Настройка";
- «Тип данных» – тип получаемых данных от Modbus устройства. Могут быть текущие или исторические данные. Текущие данные - это данные получаемые при помощи функций 1,2,3,4,5,6,15,16. Исторические данные - это данные получаемые при помощи функции 20. При изменении свойств узла тип данных изменить нельзя. Тип данных можно задавать только при добавлении узла;;
- «Период опроса» – период опроса устройства;
- «Начальная фаза» – начальная фаза опроса устройства;
- «Протокол» – тип используемого протокола. Может быть Modbus RTU или Modbus ASCII. Modbus RTU – стандартный бинарный протокол Modbus RTU. Modbus ASCII - стандартный текстовый протокол Modbus ASCII;
- «Адрес устройства» – определяет MODBUS адрес устройства, с которым осуществляется связь (в десятичном виде);
- «Функция чтения» – номер Modbus функции чтения (в десятичном виде);
- «Функция записи» – номер Modbus функции записи (в десятичном виде);
- «Групповой запрос» – установка пункта дает возможность отправки запроса на чтение/запись группы переменных. Сброс - предполагает чтение/запись каждой переменной в отдельном запросе.
- «Дополнительно» – дополнительные параметры;
Параметры «Период опроса» и «Начальная фаза» определяют опрос устройства. Например «Период опроса» - 30 сек, «Начальная фаза» - 4 сек. Тогда время опроса: 00:00:04, 00:00:34, 00:01:04, 00:01:34 и т.д. В случае установки «Период опроса» - 0 сек, опрос не будет производиться.
Для добавления узла необходимо нажать кнопку «Добавить».
- «Начальный номер» - начальный номер узла, используемый при нумерации тиражируемых узлов. Номер узла присоединяется к текущему имени узла;
- «Кол-во» - количество тиражируемых узлов;
- «Адрес устройства. Шаг» - шаг изменения Modbus адреса устройства при тиражировании узла.
Настройка подключения
Кнопка «Настройка . » группы «Подключение» предназначена редактирования настроек выбраного типа подключения.
Для прямого подключения необходимо задать номер COM порта к которому подключено Modbus устройства через интерфейс RS-232C или RS-485.

Для модемного подключения необходимо задать номер COM порта к которому подключен модем, дополнительные команды инициализации и номер телефона.

Команды инициализации определяют команды которые будут посланы модему перед дозвоном. С помощью команд инициализации можно например определить тип набора по умолчанию, задать значения регистров, определить параметры связи и т.д.
- Т - тоновый набор,
- P - импульсный набор,
- W - ждать наборного тона,
- @ - ждать ответной паузы,
- ! - ожидание,
- R - возобновить режим ответа,
- S - набрать хранимый номер,
- / - ждать 0,125 секунды,
- ; - вернуться в командный режим,
- , - ждать S8 секунд.
- +4951234567
- (495)123-45-67
- T9WP8W4951234567
Для TCP подключения необходимо задать протокол, IP адрес (или DNS имя) и номер TCP порта для подключения к удаленному Modbus устройству.

- «Modbus TCP» - стандартный протокол Modbus TCP. Описан в спецификации Modbus;
- «Modbus через TCP» - передача через TCP по стандартному протоколу Modbus RTU/ASCII.
История
Для чтения исторических данных с помощью стандартной 20-ой Modbus функции, необходимо выбрать «Тип данных» - «История».

Кнопка «Параметры . » поля «Формат данных» предназначена для определения формата исторических данных.

- «Размер физической записи истории» - размер одной исторической записи (Record) при чтении истории с помощью 20-ой функции;
- «Номер файла (по умолчанию)» - номер файла (File number), который используется по умолчанию. Номер файла можно менять используя системную историческую переменную HISTORY_FILE_NUMBER;
- «Номер первой записи (по умолчанию)» - номер первой записи, который используется по умолчанию. Номер первой записи можно менять используя системную историческую переменную HISTORY_FIRST_RECORD;
- «Номер последней записи (по умолчанию)» - номер последней записи, который используется по умолчанию. Номер последней записи можно менять используя системную историческую переменную HISTORY_LAST_RECORD;
- HISTORY_FILE_NUMBER - номер файла;
- HISTORY_FIRST_RECORD - номер первой записи;
- HISTORY_LAST_RECORD - номер последней записи;
- HISTORY_CURRENT_RECORD - номер текущей записи.
- «Размер логической записи истории» - размер одной логической записи, т.е. записи хранящей список сгруппированых значений (обычно привязанных к одной временной метке);
- «Использовать номер файла» - использовать номер файла (рекомендуется использовать). Если номер файла не используется, то в 20-ой команде номер первой записи может принимать более широкий диапазон значений (номер будет занимать 4 байта, вместо 2 байт).
При измении свойств узла формат данных истории изменить нельзя. Формат данных истории можно задавать только при добавлении узла.
Обращайтесь к разработчику и ваш формат истории будет добавлен в список поддерживаемых форматов.
- «Excel» - сохранение данных в Microsoft Excel. При этом Excel должен быть инсталлирован. Для сохранения в Excel нужно задать каталог хранения, способ именования файлов Excel и вставлять или нет признакм начала и конца чтения;
- «База данных» - сохранение данных в любой базе данных (через ADO). Необходимо добавить в данный узел SQL переменную, в которой определить скрипт чтения. В скрипте чтения необходимо использовать исторические переменные, содержащиеся в данном узле.
Также можно сохранять историю во встроенную базу данных установив признак сохранения состояния исторической переменной в дополнительных параметрах переменной (см. «Дополнительные параметры переменной»).
Дополнительные параметры
Кнопка «Параметры . » группы «Дополнительно» формы добавления Modbus узла предназначена для редактирования дополнительных параметров узла.

Благодаря универсальности и открытости, стандарт позволяет интегрировать оборудование разных производителей. Modbus используется для сбора показания с датчиков, управления реле и контроллерами, мониторинга, и т.д.
В статье разберем реализации протокола Modbus, форматы данных, программное обеспечение для работы с протоколом. Попробуем на практике прочитать данные из устройства.
История Modbus
Modbus был представлен в 1979 году компанией Modicon (ныне Schneider Electric). Это был открытый стандарт, работающий по интерфейсу RS-232. Позже появилась реализации протокола для интерфейсов RS-485 и Modbus TCP. Протокол быстро набрал популярность, и многие производители стали внедрять его в своих устройствах.
Позже права на протокол были переданы некоммерческой организации Modbus Organization, которая до сегодняшнего дня владеет стандартом.
В описании стандарта Modbus используются терминология, унаследованная от языков релейной логики. Так, например, некоторые регистры называются катушками (англ. coil).
Физический уровень

- RS-232/422/485 — последовательные интерфейсы, широко распространенные в промышленности. Интерфейсы RS-422/485 обеспечивают дальность сигнала до 1200 метров. Используются протоколы Modbus RTU/ASCII
- Сети TCP/IP — физическим каналом передачи данных могут любые ethernet-интерфейсы. Используется протокол Modbus TCP
Логический уровень

Различия протоколов Modbus
Modbus ASCII
Данные кодируются символами из таблицы ASCII и передаются в шестнадцатеричном формате. Начало каждого пакета обозначается символом двоеточия, а конец — символами возврата каретки и переноса строки. Это позволяет использовать протокол на линиях с большими задержками и оборудовании с менее точными таймерами.
Modbus RTU
Modbus TCP
Структура пакетов схожа с Modbus RTU, данные также кодируются в двоичный формат, и упаковываются в обычный TCP-пакет, для передачи по IP-сетям. Проверка целостности, используемая в Modbus RTU, не применяется, так как TCP уже имеет собственный механизм контроля целостности.
Формат пакета

Форматы пакета разных реализаций Modbus
Все устройства Modbus взаимодействуют, следуя модели master-slave. Запросы может инициировать только master-устройство, slave-устройства могут только отвечать на запросы, и не могут самостоятельно начинать передачу данных. В зависимости от реализации протокола, заголовки пакета различаются. Вот основные составляющие пакета, которые важно знать:
ADU (Application Data Unit) — пакет Modbus целиком, со всеми заголовками, PDU, контрольной суммой, адресом и маркерами. Отличается, в зависимости от реализации протокола.
PDU (protocol data unit) — основная часть пакета, одинаковая для всех реализаций протокола. Содержит сам payload.
Адрес устройства — адрес получателя, то есть slave-устройства. В одном сегменте Modbus-сети могут находится до 247 устройств. Только slave-устройства имеют различающиеся адреса, master-устройство не имеет адреса. Адрес «0» используется для широковещательных запросов от master, при этом, slave-устройства не могут отвечать на эти широковещательные пакеты.
Контрольная сумма — алгоритмы проверки целостности пакетов. В Мodbus RTU и ASCII используется 2 байта контрольной суммы. В Modbus RTU применяется алгоритм CRC16, в Modbus ASCII — более простой и менее надежный LRC8. В Modbus TCP контрольная сумма не добавляется в ADU, так как целостность проверяется на уровне TCP.
Мы не будем разбирать дополнительные заголовки, специфичные для каждой отдельной реализации протокола, так как это не имеет существенного значения при работе с протоколом на прикладном уровне.
Регистры и функции Modbus
В упрощенном виде, структура запросов Modbus состоит из кода функции (чтение/запись), и данных, которые нужно считать или записать. При этом, коды функции различаются для разных типов данных. Разберем, какие бывают регистры, и функции для работы с ними.

- Discrete Inputs — дискретные входы устройства, доступны только для чтения. Диапазон адресов регистров: с 10001 по 19999. Имеют функцию «02» — чтение группы регистров
- Coils — дискретные выходы устройства, или внутренние значения. Доступны для чтения и записи. Диапазон адресов регистров: с 20001 по 29999. Имеет функции: «01» — чтения группы регистров, «05» — запись одного регистра, «15» — запись группы регистров
- Input Registers — 16-битные входы устройства. Доступны только для чтения. Диапазон адресов регистров: с 30001 по 39999. Имеют функцию: «04» — чтение группы регистров
- Holding Registers — 16-битные выходы устройства, либо внутренние значения. Доступны для чтения и записи. Диапазон адресов регистров: с 40001 по 49999. Имеют
Примеры работы
Для примера работы с протоколом Modbus TCP воспользуемся максимально простой консольной утилитой modbus-cli, написанной на языке Ruby. Она позволяет легко читать и писать данные в регистры Modbus.
Попробуем прочесть состояние счетчиков переданных пакетов на промышленном коммутаторе Advantech EKI-5524SSI. Для начала необходимо определить адреса регистров, хранящие нужную информацию, для этого заглянем в документацию устройства. Описание регистров находятся в разделе «Modbus Mapping Table»:

Описание значений регистров в документации коммутаторов EKI
Видно, что значение переданных пакетов для одного порта хранится в четырех регистрах, и для первого порта это регистры с 38193 по 38197. Также дано описание формата хранения данных, из которого следует, что целое число переданных пакетов хранится шестнадцатеричном формате, и значение 11223344 пакетов будет записано как 0xAB4130, справа налево.
read — команда чтения. Программа сама понимает, какую конкретно команду чтения использовать в зависимости от адреса регистра, в нашем случае будет использована команда «04», для чтения 16-битных регистров.
192.168.0.17 — IP-адрес устройства.
38193 — начальный адрес регистра.
4 — смещение относительно начального адреса. Мы читаем четыре регистра для порта 1, как следует из даташита.
Получаем ответ, содержащий значения четырех регистров. Видим, что число пакетов невелико: 0x3459, то есть 13401, — коммутатор был включен недавно.
Недостатки протокола Modbus
Справедливости ради, стоит упомянуть и о недостатках протокола. Так как он разрабатывался более 40 лет назад, когда производительность процессоров была существенно ниже и протоколы разрабатывались без учета защиты данных, он имеет рад минусов:
- Протокол не предусматривает аутентификацию и шифрование передаваемых данных. Поэтому, при использовании Modbus TCP необходимо использовать дополнительные VPN-тоннели.
- Slave-устройство не может инициировать передачу данных, поэтому master должен постоянно опрашивать ведомые устройства
- Slave-устройство не может обнаружить потерю связи с Master. Эта проблема напрямую следует из предыдущей.
Оборудование с поддержкой Modbus
Advantech предлагает широкий спектр промышленного оборудования с поддержкой протокола Modbus для любых задач: автоматизации, управления, сбора и передачи данных.
ADAM-6000 и WISE-4000 — модули удаленного ввода-вывода

Модули серии ADAM-6000 и WISE-4000 позволяют удаленно управлять цифровыми и аналоговыми входами/выходами по протоколу Modbus TCP. Используются для управления периферийными устройствами и сбора данных в режиме slave. Могут работать в паре с программируемым логическим контроллером, или подключаться напрямую к SCADA-серверу.⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀
EKI-1200 — Modbus-шлюзы для преобразования интерфейсов

Для преобразования протоколов Modbus RTU/ASCII в Modbus TCP, используются Modbus шлюзы. Устройства серии EKI-1200 имеют на борту до четырех последовательных интерфейсов RS-232/422/485, и два Ethernet-порта. Они позволяют объединить в одну сеть устройства с разными протоколами. Например, подключить slave устройство, поддерживающее только Modbus RTU, по интерфейсу RS-485 к сегменту сети Modbus TCP.
APAX-5000, ADAM-3600, WISE-5000 — контроллеры автоматизации
Контроллеры поддерживают функции Modbus RTU в качестве slave/master и клиента/сервера Modbus TCP.

Примеры применения
Система мониторинга теплиц
Решение Advantech для мониторинга интегрирует устройства TPC-1070H, ADAM-6024, ADAM-6050, ADAM-6060 и программное обеспечение WebAccess в машинном шкафу рядом с сельскохозяйственными угодьями. Соединяясь с различными чувствительными устройствами, модули ADAM-6000 могут в режиме реального времени получать данные об окружающей среде и контролировать переключение оборудования, чтобы гарантировать, что теплица находится в оптимальной среде для роста растений. Благодаря особой функции Advantech — графической логике условий (GCL), пользователи могут определять свои собственные правила логики управления и загружать эти правила в модули ввода / вывода Ethernet ADAM-6000, а затем модули автоматически выполняют логические правила, как автономные модули. контроллер. Еще одна особенность — Peer-to-Peer (P2P) использует наиболее открытую и гибкую сеть Ethernet, чтобы не только упростить процесс внедрения без контроллера, но и сэкономить затраты на аппаратное оборудование.
Все полученные данные затем передаются через Ethernet на компьютер с сенсорной панелью TPC-1070H. Благодаря системе охлаждения без вентилятора и передней панели, соответствующей стандарту IP65, TPC-1070H представляет собой прочную и компактную конструкцию, подходящую для изменяемой операционной среды, а его мощные вычислительные возможности способны обрабатывать большие объемы данных. Для управления устройствами Advantech WebAccess позволяет инженерам или менеджерам просматривать, контролировать и настраивать систему мониторинга через интрасеть или Интернет с помощью обычного веб-браузера с любого устройства, включая планшеты и смартфоны.

Мониторинг системы нагрева воды солнечной энергией
Инжиниринговая компания должна была иметь возможность контролировать количество солнечной энергии, температуры и расход воды в системе нагрева воды на солнечной энергии для бассейна олимпийских размеров, обеспечиваемого их недавно разработанной солнечной панелью. Они также должны были иметь возможность непосредственно отслеживать эти значения и их аварийные сигналы на ЖК-панелях и сохранять эти значения для дальнейшего использования.
Модули Adam от Advantech предоставили заказчику решение, в котором использовались модули сбора данных, подключенные через RS485, и двухпроводная шина для передачи данных со всех датчиков. Эта системная архитектура имеет два основных преимущества: во-первых, она позволяет в любое время добавлять в систему большее количество датчиков модулей сбора данных, и, во-вторых, очень легко добавлять дополнительные метки в программное обеспечение для мониторинга и записи этих значений на ПК.
Благодаря универсальности и открытости, стандарт позволяет интегрировать оборудование разных производителей. Modbus используется для сбора показания с датчиков, управления реле и контроллерами, мониторинга, и т.д.
В статье разберем реализации протокола Modbus, форматы данных, программное обеспечение для работы с протоколом. Попробуем на практике прочитать данные из устройства.
История Modbus
Modbus был представлен в 1979 году компанией Modicon (ныне Schneider Electric). Это был открытый стандарт, работающий по интерфейсу RS-232. Позже появилась реализации протокола для интерфейсов RS-485 и Modbus TCP. Протокол быстро набрал популярность, и многие производители стали внедрять его в своих устройствах.
Позже права на протокол были переданы некоммерческой организации Modbus Organization, которая до сегодняшнего дня владеет стандартом.
В описании стандарта Modbus используются терминология, унаследованная от языков релейной логики. Так, например, некоторые регистры называются катушками (англ. coil).
Физический уровень
- RS-232/422/485 — последовательные интерфейсы, широко распространенные в промышленности. Интерфейсы RS-422/485 обеспечивают дальность сигнала до 1200 метров. Используются протоколы Modbus RTU/ASCII
- Сети TCP/IP — физическим каналом передачи данных могут любые ethernet-интерфейсы. Используется протокол Modbus TCP
Логический уровень
Различия протоколов Modbus
Modbus ASCII
Данные кодируются символами из таблицы ASCII и передаются в шестнадцатеричном формате. Начало каждого пакета обозначается символом двоеточия, а конец — символами возврата каретки и переноса строки. Это позволяет использовать протокол на линиях с большими задержками и оборудовании с менее точными таймерами.
Modbus RTU
Modbus TCP
Структура пакетов схожа с Modbus RTU, данные также кодируются в двоичный формат, и упаковываются в обычный TCP-пакет, для передачи по IP-сетям. Проверка целостности, используемая в Modbus RTU, не применяется, так как TCP уже имеет собственный механизм контроля целостности.
Формат пакета
Форматы пакета разных реализаций Modbus
Все устройства Modbus взаимодействуют, следуя модели master-slave. Запросы может инициировать только master-устройство, slave-устройства могут только отвечать на запросы, и не могут самостоятельно начинать передачу данных. В зависимости от реализации протокола, заголовки пакета различаются. Вот основные составляющие пакета, которые важно знать:
ADU (Application Data Unit) — пакет Modbus целиком, со всеми заголовками, PDU, контрольной суммой, адресом и маркерами. Отличается, в зависимости от реализации протокола.
PDU (protocol data unit) — основная часть пакета, одинаковая для всех реализаций протокола. Содержит сам payload.
Адрес устройства — адрес получателя, то есть slave-устройства. В одном сегменте Modbus-сети могут находится до 247 устройств. Только slave-устройства имеют различающиеся адреса, master-устройство не имеет адреса. Адрес «0» используется для широковещательных запросов от master, при этом, slave-устройства не могут отвечать на эти широковещательные пакеты.
Контрольная сумма — алгоритмы проверки целостности пакетов. В Мodbus RTU и ASCII используется 2 байта контрольной суммы. В Modbus RTU применяется алгоритм CRC16, в Modbus ASCII — более простой и менее надежный LRC8. В Modbus TCP контрольная сумма не добавляется в ADU, так как целостность проверяется на уровне TCP.
Мы не будем разбирать дополнительные заголовки, специфичные для каждой отдельной реализации протокола, так как это не имеет существенного значения при работе с протоколом на прикладном уровне.
Регистры и функции Modbus
В упрощенном виде, структура запросов Modbus состоит из кода функции (чтение/запись), и данных, которые нужно считать или записать. При этом, коды функции различаются для разных типов данных. Разберем, какие бывают регистры, и функции для работы с ними.
- Discrete Inputs — дискретные входы устройства, доступны только для чтения. Диапазон адресов регистров: с 10001 по 19999. Имеют функцию «02» — чтение группы регистров
- Coils — дискретные выходы устройства, или внутренние значения. Доступны для чтения и записи. Диапазон адресов регистров: с 20001 по 29999. Имеет функции: «01» — чтения группы регистров, «05» — запись одного регистра, «15» — запись группы регистров
- Input Registers — 16-битные входы устройства. Доступны только для чтения. Диапазон адресов регистров: с 30001 по 39999. Имеют функцию: «04» — чтение группы регистров
- Holding Registers — 16-битные выходы устройства, либо внутренние значения. Доступны для чтения и записи. Диапазон адресов регистров: с 40001 по 49999. Имеют
Примеры работы
Для примера работы с протоколом Modbus TCP воспользуемся максимально простой консольной утилитой modbus-cli, написанной на языке Ruby. Она позволяет легко читать и писать данные в регистры Modbus.
Попробуем прочесть состояние счетчиков переданных пакетов на промышленном коммутаторе Advantech EKI-5524SSI. Для начала необходимо определить адреса регистров, хранящие нужную информацию, для этого заглянем в документацию устройства. Описание регистров находятся в разделе «Modbus Mapping Table»:
Описание значений регистров в документации коммутаторов EKI
Видно, что значение переданных пакетов для одного порта хранится в четырех регистрах, и для первого порта это регистры с 38193 по 38197. Также дано описание формата хранения данных, из которого следует, что целое число переданных пакетов хранится шестнадцатеричном формате, и значение 11223344 пакетов будет записано как 0xAB4130, справа налево.
read — команда чтения. Программа сама понимает, какую конкретно команду чтения использовать в зависимости от адреса регистра, в нашем случае будет использована команда «04», для чтения 16-битных регистров.
192.168.0.17 — IP-адрес устройства.
38193 — начальный адрес регистра.
4 — смещение относительно начального адреса. Мы читаем четыре регистра для порта 1, как следует из даташита.
Получаем ответ, содержащий значения четырех регистров. Видим, что число пакетов невелико: 0x3459, то есть 13401, — коммутатор был включен недавно.
Недостатки протокола Modbus
Справедливости ради, стоит упомянуть и о недостатках протокола. Так как он разрабатывался более 40 лет назад, когда производительность процессоров была существенно ниже и протоколы разрабатывались без учета защиты данных, он имеет рад минусов:
- Протокол не предусматривает аутентификацию и шифрование передаваемых данных. Поэтому, при использовании Modbus TCP необходимо использовать дополнительные VPN-тоннели.
- Slave-устройство не может инициировать передачу данных, поэтому master должен постоянно опрашивать ведомые устройства
- Slave-устройство не может обнаружить потерю связи с Master. Эта проблема напрямую следует из предыдущей.
Оборудование с поддержкой Modbus
Advantech предлагает широкий спектр промышленного оборудования с поддержкой протокола Modbus для любых задач: автоматизации, управления, сбора и передачи данных.
ADAM-6000 и WISE-4000 — модули удаленного ввода-вывода
Модули серии ADAM-6000 и WISE-4000 позволяют удаленно управлять цифровыми и аналоговыми входами/выходами по протоколу Modbus TCP. Используются для управления периферийными устройствами и сбора данных в режиме slave. Могут работать в паре с программируемым логическим контроллером, или подключаться напрямую к SCADA-серверу.⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀ ⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀⠀
EKI-1200 — Modbus-шлюзы для преобразования интерфейсов
Для преобразования протоколов Modbus RTU/ASCII в Modbus TCP, используются Modbus шлюзы. Устройства серии EKI-1200 имеют на борту до четырех последовательных интерфейсов RS-232/422/485, и два Ethernet-порта. Они позволяют объединить в одну сеть устройства с разными протоколами. Например, подключить slave устройство, поддерживающее только Modbus RTU, по интерфейсу RS-485 к сегменту сети Modbus TCP.
APAX-5000, ADAM-3600, WISE-5000 — контроллеры автоматизации
Контроллеры поддерживают функции Modbus RTU в качестве slave/master и клиента/сервера Modbus TCP.
Примеры применения
Система мониторинга теплиц
Решение Advantech для мониторинга интегрирует устройства TPC-1070H, ADAM-6024, ADAM-6050, ADAM-6060 и программное обеспечение WebAccess в машинном шкафу рядом с сельскохозяйственными угодьями. Соединяясь с различными чувствительными устройствами, модули ADAM-6000 могут в режиме реального времени получать данные об окружающей среде и контролировать переключение оборудования, чтобы гарантировать, что теплица находится в оптимальной среде для роста растений. Благодаря особой функции Advantech — графической логике условий (GCL), пользователи могут определять свои собственные правила логики управления и загружать эти правила в модули ввода / вывода Ethernet ADAM-6000, а затем модули автоматически выполняют логические правила, как автономные модули. контроллер. Еще одна особенность — Peer-to-Peer (P2P) использует наиболее открытую и гибкую сеть Ethernet, чтобы не только упростить процесс внедрения без контроллера, но и сэкономить затраты на аппаратное оборудование.
Все полученные данные затем передаются через Ethernet на компьютер с сенсорной панелью TPC-1070H. Благодаря системе охлаждения без вентилятора и передней панели, соответствующей стандарту IP65, TPC-1070H представляет собой прочную и компактную конструкцию, подходящую для изменяемой операционной среды, а его мощные вычислительные возможности способны обрабатывать большие объемы данных. Для управления устройствами Advantech WebAccess позволяет инженерам или менеджерам просматривать, контролировать и настраивать систему мониторинга через интрасеть или Интернет с помощью обычного веб-браузера с любого устройства, включая планшеты и смартфоны.
Мониторинг системы нагрева воды солнечной энергией
Инжиниринговая компания должна была иметь возможность контролировать количество солнечной энергии, температуры и расход воды в системе нагрева воды на солнечной энергии для бассейна олимпийских размеров, обеспечиваемого их недавно разработанной солнечной панелью. Они также должны были иметь возможность непосредственно отслеживать эти значения и их аварийные сигналы на ЖК-панелях и сохранять эти значения для дальнейшего использования.
Модули Adam от Advantech предоставили заказчику решение, в котором использовались модули сбора данных, подключенные через RS485, и двухпроводная шина для передачи данных со всех датчиков. Эта системная архитектура имеет два основных преимущества: во-первых, она позволяет в любое время добавлять в систему большее количество датчиков модулей сбора данных, и, во-вторых, очень легко добавлять дополнительные метки в программное обеспечение для мониторинга и записи этих значений на ПК.
Читайте также: