
Как поменять управление в driver
Этот способ применяется автоматически — как правило, после установки новой системы. Windows 10 сама скачает все необходимые для работы драйверы устройств. Для этого достаточно дать системе обновиться, нажав «Пуск» → «Параметры» → «Обновление и безопасность» → «Проверить наличие обновлений».
Минус этого способа в том, что на серверах обновлений Windows 10 не всегда присутствуют самые свежие драйверы. Или система может вместо специфической программы от производителя установить стандартную. В итоге устройство будет работать, но самых новых функций и исправлений не получит. Тем не менее в большинстве случаев автоматически устанавливаемых драйверов достаточно для использования Windows 10.
2. С сайта производителя ПК
Если вы обладатель компьютера от конкретного вендора вроде Dell, HP, Lenovo и так далее — скорее всего, поставщик устройства позаботился о драйверах. Откройте официальный сайт производителя и найдите там свою модель — для этого понадобится набрать её название или серийный номер. Затем скачайте драйверы и просто установите их как обычное ПО.
Процесс может быть довольно нудным, если вам нужно инсталлировать не парочку программ, а полтора десятка. В этом случае стоит воспользоваться специальной утилитой для установки драйверов. Такие варианты предоставляет большинство производителей ноутбуков. Вот наиболее популярные:
3. С сайта производителя комплектующих
Если вы сами собрали свой компьютер, а не купили готовый, предыдущий вариант для вас не подойдёт. В таком случае придётся искать драйверы не для ПК целиком, а для отдельных комплектующих, на сайтах их производителей. Откройте официальный сайт устройства, введите там название и загрузите драйвер. Затем установите его как обычную программу.
Для некоторых девайсов производитель предоставляет не только драйвер, но и ПО для его автоматической загрузки и обновления. Например, программы AMD Radeon Software, NVIDIA GeForce Experience или Intel Driver & Support Assistant. Установите их, и они сами подберут подходящий драйвер для видеокарты, процессора и прочих комплектующих.
4. Через «Диспетчер устройств»
Как уже говорилось выше, в большинстве случаев драйверы устанавливаются довольно просто. Достаточно дважды щёлкнуть файл формата EXE или MSI и немного подождать. Но иногда вы скачиваете с сайта производителя ПО не исполняемый файл, а архив с малопонятным содержимым, и неясно, что с ним делать.
Откройте меню «Пуск» правой кнопкой мыши и нажмите «Диспетчер устройств». Найдите нужный девайс, щёлкните его правой кнопкой мыши и выберите «Свойства» → «Драйвер» → «Обновить драйвер».
Если вы нажмёте «Автоматический поиск драйверов», то Windows 10 установит ПО из «Центра обновлений». Если же вы выберите «Найти драйверы на этом компьютере», то сможете указать нужную программу.
Распакуйте скачанный с сайта производителя архив в новую папку, а затем выберите её в поле «Искать драйверы…».
5. С помощью Snappy Driver Installer
Однако есть утилита для обновления драйверов, которая так не делает, — это Snappy Driver Installer. Программа бесплатна и обладает открытым исходным кодом. Рекомендуем выбирать Lite‑версию, чтобы не скачивать пак драйверов на 20 ГБ.
Загрузите её, извлеките содержимое архива и откройте программу, затем нажмите «Загрузить только индексы». Подождите немного, и утилита покажет вам, какие драйверы в вашей системе отсутствуют. Выделите нужные галочками и щёлкните «Установить».
Snappy Driver Installer пригодится, если вы не смогли найти драйверы для какого‑либо оборудования способами, перечисленными выше.

Запускаем игру)
PS. Может выскочить ошибка,не обращайте внимания.




[IDevIL то есть если у кто-то купил джойстик в 2006 году и Драйвер его не видит,так что новый бежать покупать? херню не неси.у тебя проблем нету вот и зашейся где-нибудь

[IDevIL Эм..чел, я конечно понимаю твое желание выепнутся, ведь твой разум школьника тебя обязывает, и не пытайся оправдываться, ты пека@б, а все пека@бы школьники, и показать что у тебя нормальный пад, который игра видит, но видишь ли, твой пост тем у кого игра не видит пад нихрена не помогает, так что если у тебя все работает тебе нет смысла сидеть в этом трэде.
[IDevIL у многих Driver не видит джойстик

У меня Ligitech F 510 всё нормально идет. Кстати на крайняк юзайте xpadder [IDevIL Еще бы и лицензию взять надо=)

Нормальный - это оригинальный геймпад xbox360

Всё проще же,воткнул в USB и играешь. [2]
создал вчера эту тему на форуме к Driver,модеры взяли и снесли.Нахрена? лучше бы вовремя спамеров банили.

Эм..чел, я конечно понимаю твое желание выепнутся, ведь твой разум школьника тебя обязывает, и не пытайся оправдываться, ты пека@б, а все пека@бы школьники, и показать что у тебя нормальный пад, который игра видит, но видишь ли, твой пост тем у кого игра не видит пад нихрена не помогает, так что если у тебя все работает тебе нет смысла сидеть в этом трэде. Тут походу так сказать выебнуца решил ты,аж целую лекцию бессмысленных слов написал,которые я даже читать не буду.Так что шёл бы ты отсюдава.
[IDevIL Да да, можешь не читать, понимаю, школьникам это удается с трудом.

Пацаны, спокойнее. Будьте доброжелательны друг к другу.

У меня dual action =) пока не пробовал

Ссылка больше не действительна.
Всё проще же,воткнул в USB и играешь.

Покупаешь джойстик Xbox 360 и никаких проблем

Daemon666 Вас что школьник изнасиловал ? Слишком много слов школьник.
Т.к. вы не трастовый пользователь. Как стать трастовым.
1) Конфиг лежит в профиле пользователя2) Конфиг лежит в реестре
3) У игры нет конфига и все настройки hard-coded )))
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Взять Api монитор, посмотреть, какая функция вызывается для чтения состояния клавиш, найти в коде, где она вызывается, посмотреть - откуда из памяти берётся значение, с которым сравнивается. Найти, где оно записывается в память, по брейкпоинту на область памяти определить момент записи, открутить трейс немного обратно и посмотреть - откуда оно берётся изначально. Там пропатчить.Это для п.3 предыдущего оратора :)
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Слишком сложно для меня. Вы сможете это сделать за деньги ?Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Могу, только вот читаю ниже - задача слегка усложняется, надо подменять не коды клавиш, а функционалТ.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
А графические объекты Вы сможете в игру вставить ? На скрине снизу большой контейнеровоз проходит мимо двух маленьких, которые пришвартованы у причала. Можно вместо этих двух маленьких вставить два больших, таких же как проходящий ?Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Могу, наверное, в игре же они как-то создаются, но анализировать долго придётся. Тут порекомендую молодого реверс-инженера поискать, он для своего развития может попробовать потратить эту кучу времени, может и денег не попросит.Ещё совет - наймите разработчиков игры, это выйдет дешевле. Feature request сделайте им.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Разрабы в Германии. И я не совсем уверен в своём английском, чтобы ставить им задачу. Контакты реверс-инженера скиньте в личку, плиз. После НГ свяжусь с ним.Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
А с чего Вы решили, что у Meg@VaD прямо сразу есть готовый специалист под это? Тут порекомендую молодого реверс-инженера поискать, он для своего развития может попробовать.Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Значит я неправильно понял. Блин, мне показалось, что то, что я ищу - вообще плевое дело для тех кто шарит в ИТ. Знаю, что детишки-школьники какие-то моды на сталкера делают, вставляют в них всякую хрень вроде цитат навального, а тут кнопки назначить и стоящие кораблики вставить.Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Моды делаются там, где они изначально задуманы и для этого есть АПИ и инструменты.Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
3. Change controller setup - if you have game pad or such device, this button is
enabled. Then you can change the assignment. Up to two controllers are
supported.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
У меня не геймпад. Я на ноуте играю. И в качестве контроллеров используется клавиатура ноута и геймерская мышь с боковыми кнопками ( которые тоже кстати не работают ).Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.
Мануалка не совсем от моей версии игры - У меня Port of call XXL Deluxe.
Т.к. вы не трастовый пользователь (не подтвержден телефон). Укажите и подтвердите телефон. Подробнее о трастовости.

Во многих случаях пользователи пренебрегают драйверами нашего ПК, и когда мы понимаем, насколько они устарели, мы, как правило, продолжаем обновление. Проблема в том, что лекарство может быть хуже самой болезни, так как с непрерывными версиями Windows они могут давать ошибки. Поэтому сегодня мы научимся менять драйверы нашего SSD или HDD для AHCI и его контроллер, так что мы переходим от проприетарного к стандартному.
Это должно было случиться с вами: обновление драйвера и проблемы на вашем компьютере. Они могут не быть обнаружены в данный момент, но в конечном итоге они обнаруживаются, и трудно понять, что происходит. Ошибки с драйверами AHCI почти без сомнения являются худшими, потому что в большинстве случаев они препятствуют запуску ОС, поэтому в этих случаях мы должны перейти от проприетарного драйвера нашего встроенного контроллера к стандартному, но как это сделать ?
От проприетарного AHCI до стандартного за несколько простых шагов
Первое, что мы должны сделать, это без сомнения убедиться, что наш SSD или HDD установлен в правильный контроллер. Это несколько наглядно на материнская плата, главным образом потому, что есть платы с двумя разными контроллерами для увеличения количества SATA .
Обычно, если на вашей материнской плате не более 6 SATA, это означает, что она использует только один контроллер, и поэтому у нас будет только определенный драйвер для него. Зная это, мы уже можем определить в Windows, какой драйвер нужно изменить, потому что в противном случае нам пришлось бы изменить столько драйверов, сколько есть контроллеров, и это не планируется, если они не откажут.
Первый шаг - открыть диспетчер устройств , либо из панели управления Windows, либо из кнопки запуска ОС, где мы увидим структуру, подобную этой.
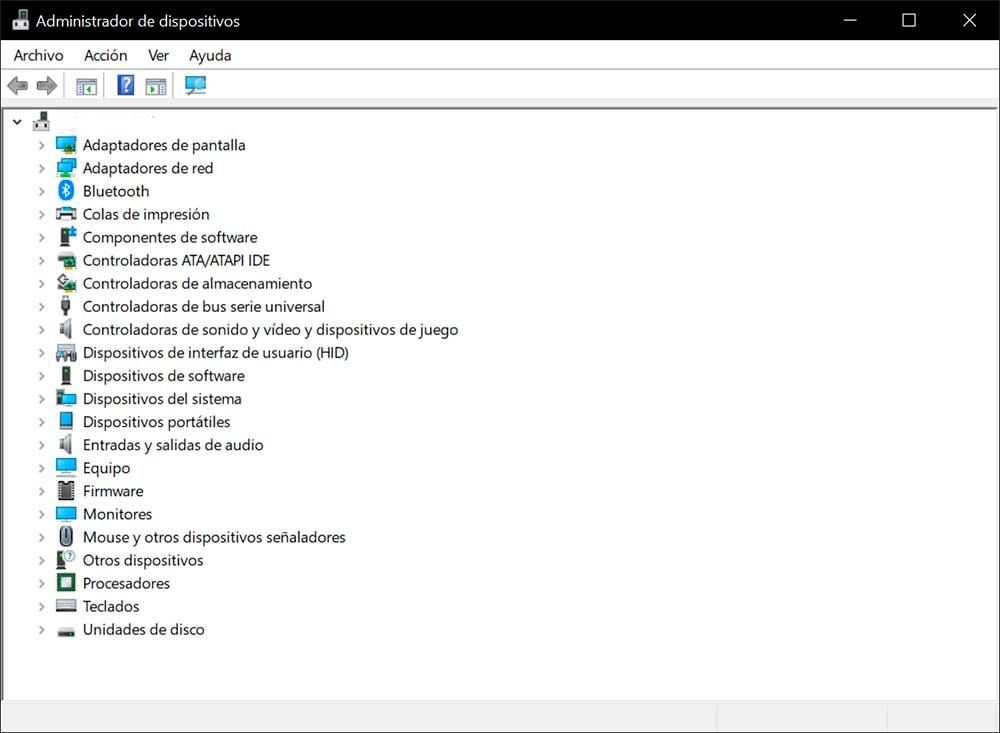
Оказавшись внутри диспетчера устройств, мы должны перейти в дерево к «Контроллер ATA / ATAPI IDE» после чего мы откроем его, как показано на следующем изображении.
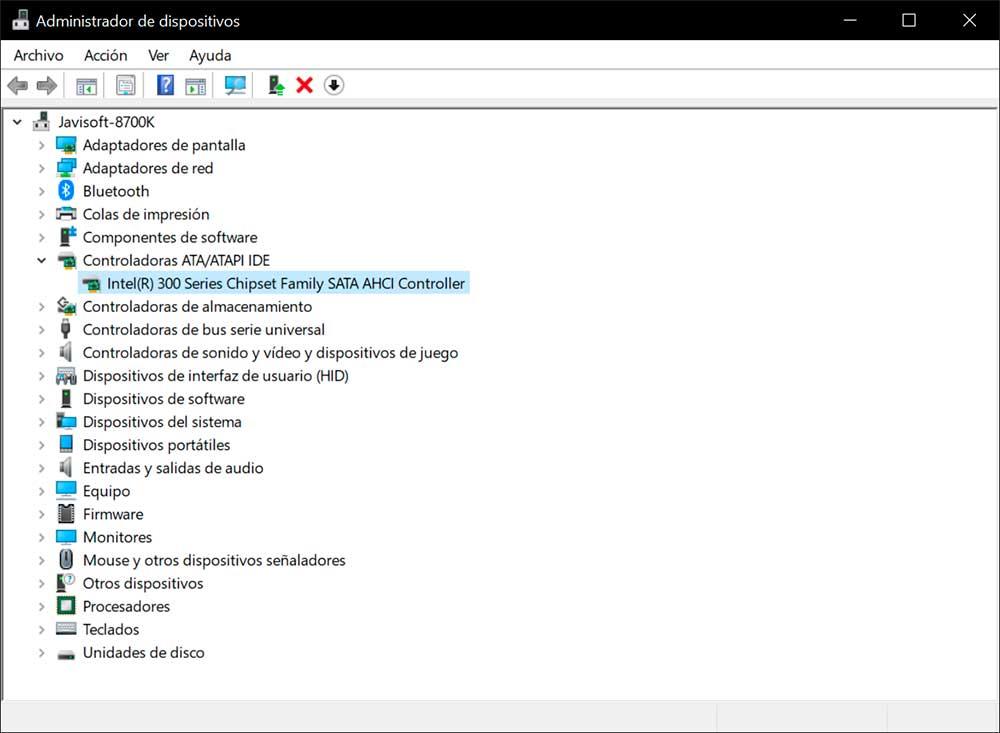
В нашем случае речь идет о материнской плате Z370, поэтому контроллер относится к Intel и его набор микросхем серии 300, как видите. Следующим шагом будет изменение самого драйвера Intel на стандартный. Microsoft Водитель.
Для этого кликаем мышкой и правой кнопкой на контроллере и выбираем «Контроллер обновления» , после чего мы получим следующее окно посередине нашего экрана:
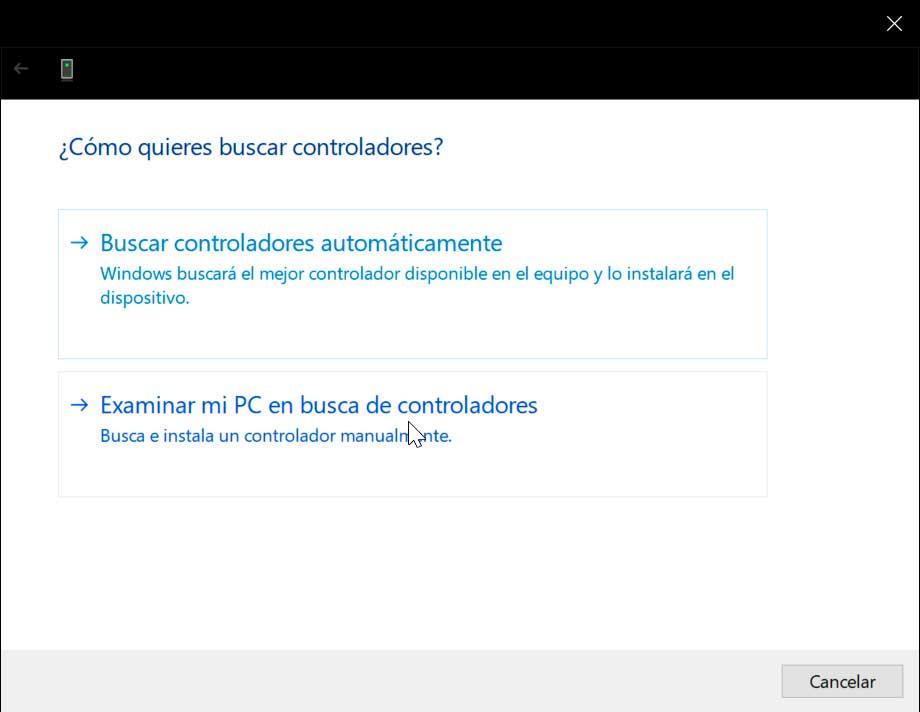
Из двух доступных вариантов выберем вторую: «Проверьте мой компьютер на наличие драйверов» , где мы получим новое окно.
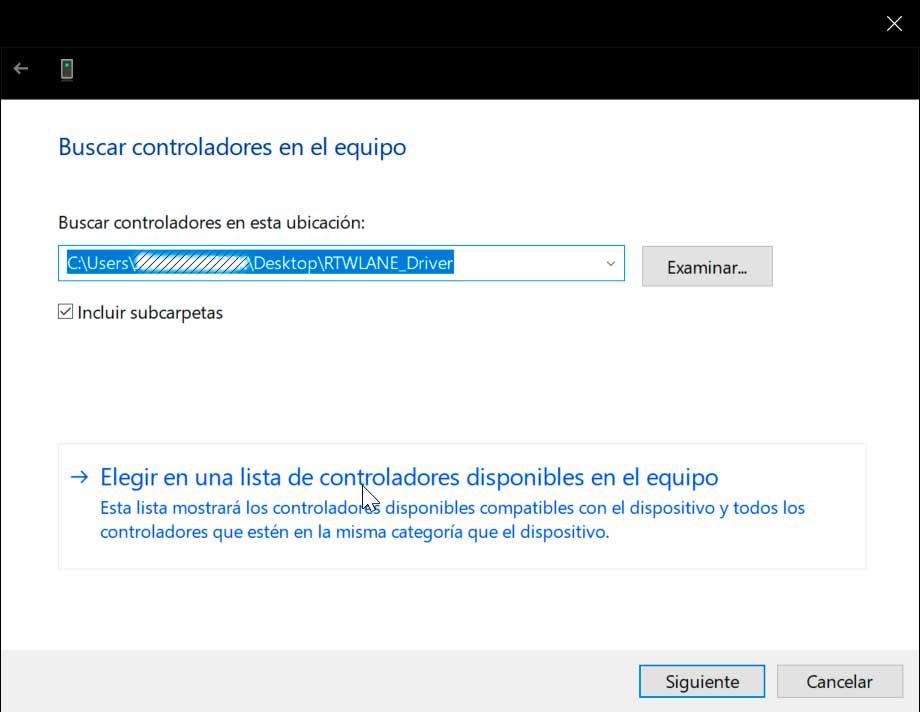
Здесь мы снова выберем второй доступный вариант: «Выберите драйвер из списка доступных на компьютере».
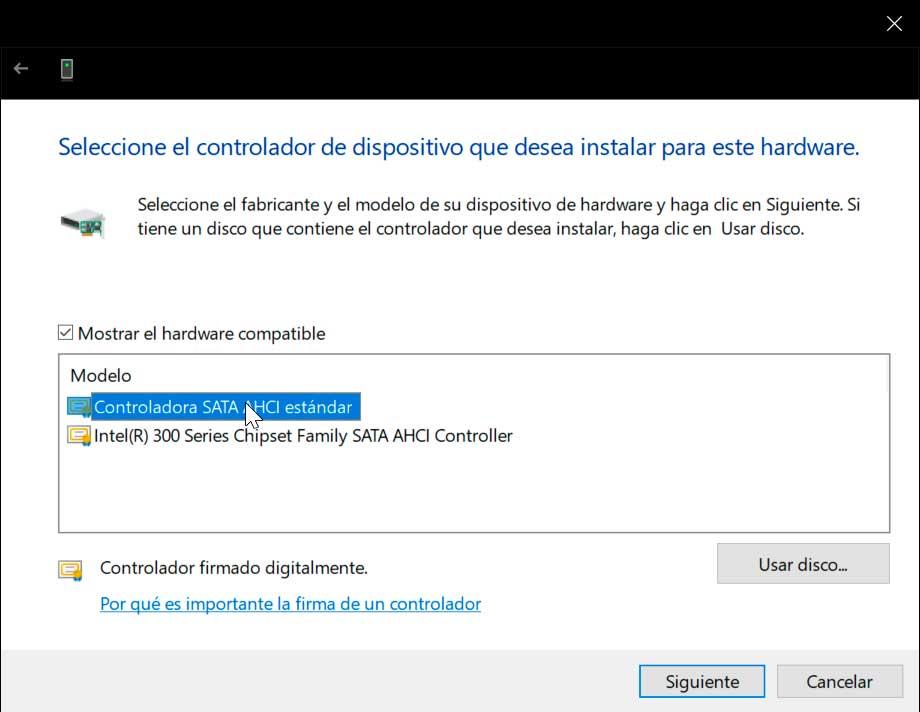
Правильный вариант для выбора уже появится здесь, так как Microsoft всегда включает стандартный драйвер AHCI для максимальной совместимости. Конечно, мы выбираем его и отдаем следующему, после чего он будет установлен и заменен Intel (в данном случае).
После этого проблемы с драйвером на нашем жестком диске или SSD должны были быть решены, и Windows должна работать нормально и с максимальной производительностью, по крайней мере, на бумаге. Не рекомендуется использовать эту технику замены для ключевых драйверов, то есть это не относится ни к одному драйверу ПК, поскольку стандартный драйвер должен иметь широкий диапазон.
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).

С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.

Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Читайте также: