
Драйвер h2 2206 выходить ошибка err 020 leadshine servo
Частотные преобразователи — это электронные или электротехнические устройства, предназначенные для изменения и регулировки частоты электрического напряжения. Сфера их использования очень широка: насосные станции, системы тепло- и водоснабжения, линии производства, конвейеры, лифты, центрифуги, мельницы, металлургические агрегаты, буровое оборудование и т. д.
Использование частотных преобразователей на промышленных объектах дает следующие преимущества:
- Возможность отказаться от регулирующего оборудования: дросселей, вариаторов, редукторов и др. Это существенно упрощает работу механической системы, снижает расходы на эксплуатацию и повышает ее надежность.
- Плавный разгон управляемого двигателя, защищающий его от механических ударов и пусковых токов, что продлевает срок его службы.
- Частотные преобразователи в паре с асинхронными двигателями можно использовать в качестве альтернативы для приводов постоянного тока.
- Максимально рациональное регулирование скорости контролируемых двигателей и связанных с этим технологических процедур.
- Экономия электроэнергии, благодаря устранению ее неоправданных трат.
Но, несмотря на свою надежность и эффективность, частотные преобразователи, как и любые электронные приборы, подвержены износу. Инженерная компания 555 специализируется на ремонте промышленной электроники, и в частности — на устранении ошибок частотных преобразователей. Наши специалисты готовы отремонтировать вышедшее из строя оборудование в кратчайшие сроки.
Основные виды и причины неисправностей
Опознать неисправности частотников позволяют коды ошибок, высвечивающиеся на мониторе устройства. Каждая такая комбинация символов указывает на совершенно конкретную проблему, и это помогает специалистам выработать правильную стратегию ремонта. Для начала рассмотрим типовые виды ошибок частотных преобразователей:
Среди других типовых неисправностей преобразователя следует выделить вращение двигателя в неправильном направлении, невозможность его запуска, проблемы с торможением и разгоном и т. д. Каждое повреждение имеет под собой конкретные причины. Например, если двигатель разгоняется очень медленно, скорее всего, дело в срабатывании функции токоограничения в момент разгона.
В число наиболее распространенных причин неисправностей входят:
- Заводской брак. Как правило, фабричные дефекты дают о себе знать в течение гарантийного срока. Поэтому для их устранения следует обращаться к поставщику или в брендовый сервисный центр.
- Ошибки при монтаже. Чаще всего причиной неисправностей становится некорректная сборка схемы привода или установка частотника в неподходящем месте.
- Нарушение норм эксплуатации. Регламент технического обслуживания изложен в инструкции, прилагаемой к устройству. Игнорирование регламента может привести к выходу из строя полупроводниковых элементов, перегреванию частотного регулятора и другим неисправностям.
- Несоответствие частотного преобразователя условиям его эксплуатации. Основные критерии выбора частотника — электрические характеристики двигателя, исполнение, набор функций и т. д. Несоответствие параметров условиям его эксплуатации приводит к некорректной работе устройства, выходу из строя и многочисленным поломкам.
Теперь поговорим об ошибках преобразователя частоты более подробно и предметно. В качестве примера рассмотрим привод известного китайского бренда INVT ELECTRIC CO, серии GDXXX. Предлагаем вашему вниманию таблицу, в которой представлены коды ошибок устройства, их расшифровка, вероятные причины неисправностей, а также способы их устранения.
Преимущества ремонта в инженерной компании 555
- Огромный опыт в ремонте частотных преобразователей разных моделей и марок.
- Команда профессиональных специалистов.
- Экономия до 70 % средств по сравнению с приобретением нового оборудования.
- Оперативное выполнение работ (максимальный срок ремонта — 15 дней).
- Бесплатная консультация и предварительный осмотр для определения ремонтопригодности привода.
- Доступные цены и оплата только по результату работы.
- Гарантия на отремонтированное оборудование — 12 месяцев.
Обращайтесь к нам из любой точки России, через сайт или по телефону. Промышленная электроника — это очень сложное и специфичное оборудование, которое следует доверять только профессионалам.
Здравствуйте. Пользуется ли кто нибудь таким двигателем?
Хочу поставить на ось "зет". Сейчас стоит обычный шаговый на 35 кг. Может работать недель без пропусков, потом два три подряд. Как я заметил пропуски появляются на моделях где много почти вертикальных перепадов. Уменьшал ускорение до 200, не помогает. Все заземлено, ось подпружинена, стоит ШВП. Надоело уже. Может такой двигатель меня спасет?
А почему на двигатель грешите?
Есть основания?
Чаще всего в пропуске шагов виновата силовая электроника.
Какой драйвер у вас стоит?
Как выполнена силовая разводка?
Сделано ли заземление?
Блок питания исправен? Не проседает при большом токе?
С чего получаете управляющие импульсы? С порта? Напрямую?
Есть гальваноразделители?
Чаще всего в пропуске шагов виновата силовая электроника.
Какой драйвер у вас стоит?
Как выполнена силовая разводка?
Сделано ли заземление?
Блок питания исправен? Не проседает при большом токе?
С чего получаете управляющие импульсы? С порта? Напрямую?
Есть гальваноразделители?
Драйвер
Разводка витыми парами в заземленной оплетке.
БП трансформатор 1кВт, 50В.
Управление МАЧ, ЛТП порт, плата опторозвязки.
Другие оси работают нормально.
Я подумал будет проще взять такой двигатель, чем бесконечно искать проблемы. Хотя с другой стороны, если проблема не в двигателе, то я рискую получить тот же результат.
Двигатель что сейчас стоит брал на тао бао. Точно не помню характеристик, но кажется индуктивность обмоток была довольно большая, да и двигатель не самый дорогой. Тогда не очень плавал в этом вопросе. Да и сейчас тоже.
Здравствуйте. Пользуется ли кто нибудь таким двигателем?
Смотрел на этом сайте вот этот, но у них нет доставки в Украину.
Драйвер
Разводка витыми парами в заземленной оплетке.
БП трансформатор 1кВт, 50В.
Управление МАЧ, ЛТП порт, плата опторозвязки.
Вроде не к чему прикопаться. Все грамотно сделано.
Давайте рассудим так.
Сколько у вас градусов на шаг? 200? Деление шага? Шаг ШВП?
Это я к тому, чтобы посчитать смещение от пропуска "пары" шагов.
Заметили бы его, если бы это была действительно пара?
Посчитайте, пожалуйста.
Если вы визуально замечали смещение, значит, это была не пара шагов, а много больше.
Далее. Пропуски шагов приводят к тому, что в результате ось Зет опускается? Поднимается?
Попробуйте написать тестовую программку для шатания оси Зет вверх-вниз минут на 10-15.
Потом сравните положение оси до и после. Уходит или нет.
Дополните программу одновременным движением по другим осям.
Ситуация изменится?
Замените драйвер на соседний. Они у вас одинаковы, так что там только фишки перекинуть,
и, возможно, свитчики попереключать.
Исключится из причин драйвер, по крайней мере.
Если вы визуально замечали смещение, значит, это была не пара шагов, а много больше.
Смещение может быть и на 5-10мм. Это уже больше похоже на срыв а не пропуск шагов.
Далее. Пропуски шагов приводят к тому, что в результате ось Зет опускается? Поднимается?
Бывает по разному. У меня ось уравновешена двумя пружинами. Но масса шпинделя все же остается.
Станок делал, так на всякий случай, особо сильно в него не вкладывался (у меня столярная мастерская). Теперь появилась возможность его загрузить работой (3д резка). Режу на скорости 3-3,5м/мин, на меньшей скорости срывов не было. Все упирается в зет. Не часто но бывают. Не охота замедлять станок. Или может для начала попробовать сменить шаговик.
Ну если просто есть желание сменить шаговик - смените.
Вам решать. Но мне кажется. если на скорости ниже срывов нет - движок непричастен.
Просто пропуски - их на слух отлично слышно.
Давайте попробуем пойти дальше.
Управляющая программа какая? Мач?
Ядро 25 кГц?
Давайте посчитаем частоту выходных импульсов.
Если она близка к чстоте ядра - может и УП быть виноватой.
Сможете посчитать частоту выходных импульсов?
Да, когда пропуск слышно "рычание "
Микрошаг 1/8, 440 имп./мм, максимальная скорость 30 мм /сек
30*440 13200 гц.
Лишних денег у меня особо нет, но хочеться подойти к станку и увидеть что там все ОК
Да. и тут не подкопаешься.
Еще вариант.
А не подклинивает ли у вас ШВП по Зет?
Тогда при большой скорости будут пропуски.
Где-то тут на форуме была ветка по подклинке оси.
И там тоже при разных скоростных режимах это проявлялось.
"Шаговые двигатели с энкодером Leadshine."
Вы уверены что Мачь позволит подключить энкодер? Насколько помнится нет. А на К-Флоп денежек много нужно. Лучше разберитесь со своим шаговиком. Промерьте сопротивление, определите какое нужно напряжение для него, есть формула. Если драйвер позволяет поднять - поднимите питание. Наконец поиграйтесь с делением шага в настройках. Отключите двигатель проверьте плавность хода проблемной оси.
Вы уверены что Мачь позволит подключить энкодер? Насколько помнится нет. А на К-Флоп денежек много нужно.
На сколько я понял этим занимается драйвер Leadshine HBS57.
Драйвер серво-шагового двигателя (шагового двигателя с энкодером) 50В/8.2А/200кГц. Оптоизолированные входы управления STEP, DIR, ENABLE. Выбор режима работы STEP/DIR или CW/CCW. Настройка драйвера с ПК через RS232, автонастройка под ШД. Защита от КЗ обмоток ШД, от обратной ЭДС ШД, режим удержания ротора ШД. Совместим с ШД 573S20-EC-1000.
Роман С возразить нечего. Незнаю таких железок. По описанию должен не пропускать шаги. Вроде 30% обещают усилие на больших оборотах прибавить.
Попробуете - расскажите. Будет что понастраивать в долгие зимние вечера.
Вроде 30% обещают усилие на больших оборотах прибавить
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
Что-то сайт ледшайна не открывается.
Графики, наверное, указаны при 100 % токе, а драйверы HBS изменяют ток в зависимости от нагрузки. Учитывая, что крутящий момент прямом пропорционален рабочему току - скорее всего так и есть - больший крутящий момент при тех же габаритах.
Другой вопрос в том - что будет при высоких скоростях, когда из за недостаточного напряжения питания драйвер просто не может поднять ток до требуемого значения, и тут уже не получится поднять ток не снижая скорости.
Тут уже энкодер поможет только тем, что двигатель сделает все возможное, чтобы как можно быстрее догнать на требуемую позицию. Т.е. вместо пропуска шагов при высокой нагрузке и скорости возможно некоторое кратковременное отставание без сбоев и потери координат.
Как я заметил пропуски появляются на моделях где много почти вертикальных перепадов. Уменьшал ускорение до 200, не помогает.
Очень похоже на недостаточную длину буфера предпросмотра в Mach3 (LookAhead).
По умолчанию там стоит 20 строк. Для рельефов этого явно мало - нужно как минимум 100, а можно и 200 установить.
разглядывал графики момента в зависимости от оборотов однотипных шаговиков с энкодером и без и что-то такой весомой прибавки в 30% не увидел.
Я не собираюсь выжимать из него максимум, просто нужно чтоб не пропускал шаги.
Не совсем понимаю что он говорит, но мне кажется что это примерно то что я ищу.
Отредактировано Роман С (01-02-2014 11:42:15)
"Шаговые двигатели с энкодером Leadshine."
Купил себе такие, поставил и был глубоко разочарован. Тот факт, что энкодер не допускает пропуска шагов,- это плюс, ну и скорость прибавилась.
На этом все. А главная проблема остается. Примером, клинит одна ось, вырубается драйвер, а другие продолжают дальше работать и портить заготовку. Абсурд.
Неужели не предусмотрен связь между всеми драйверами, чтобы при аварии все остановились, или, еще лучше, чтобы была обратная связь с пультом управления
(у меня DDCSV1.1). Или я что то не понимаю!?
Прошу специалистов, помогите разобраться, как остановить полностью выполнение программы при аварийном отключении одного из драйверов. ПЛЗ
Тарас К
А в чём проблема выход FAULT завести на E-STOP. (или выход ALARM в зависимости от модели драйвера).
Судя по схеме производителя там на выходе оптопара и соответственно все драйвера можно параллельно подключить на E-STOP.
Отредактировано Kachik (27-02-2018 00:42:47)
А главная проблема остается. Примером, клинит одна ось, вырубается драйвер, а другие продолжают дальше работать и портить заготовку. Абсурд.
Каждый элемент системы свое отрабатывает!
Драйвер работает согласно описанию.
И DDCSV1.1 не имеет обратной связи по положению.
Это глубоко бюджетный контроллер.
У меня такой стоит и прекрасно работает.
Разложим вашу проблему на составляющие.
1. У этого контроллера есть "выносные кнопки". В мануале это все расписано.
Никто не запретил некий внешний сигнал через гальваноразделительное реле применить к сигналу "пауза". В состоянии "пауза" у вас еще автоматом и фрезу поднимет над материалом.
Что будет служить этим внешним аварийным сигналом?
Да что угодно! Да хоть температура охлаждающей жидкости в шпинделе!
Или, например, как в вашем случае, выход с драйверов сигнала "Авария".
Если есть разъем в таким сигналом - хорошо.
Если такового нет - можно взять его хоть со светодиода прямо.
2. Решение проблемы с заклиниванием оси и выходом драйвера в аварию или чем-либо подобным еще.
Наличие подобной ситуации на станке - это нонсенс!
Тут надо просто упереться и эту тему решить.
Найти причину и устранить.
Делать работу на потенциально неисправном станке - это плохой подход.
Стиплайн (Steepline) предлагает широкий ассортимент моделей драйверов управления для ШД бренда Leadshine. Поставляющая свою продукцию по прямым договорам компания-производитель является одним из наиболее мощных предприятий, выпускающих электронные платы как для управления шаговых двигателей, так и надежные электронные платы для решения управляющих задач в отношении серводвигателей.
Любой имеющийся в ассортименте магазина Steepline драйвер шагового двигателя Leadshine характеризуется приемлемыми стоимостными параметрами и великолепным качеством сборки, гарантирующим длительный срок эксплуатации. Ценными качествами электронных управляющих плат является наличие в алгоритме работы функций мультистеппинга, подавления отрицательных явлений, возникающих при резонансе.

- Модель DM542 LEADSHINE
- Максимальный ток 4.2A
- Напряжение 20-50 В
- Тип двигателя 2х-фазный ШД

- Модель DMA882S LEADSHINE
- Максимальный ток 8.2A
- Напряжение 36-80 В
- Тип двигателя 2х-фазный ШД

- Модель M 542С LEADSHINE
- Максимальный ток 4.2A
- Напряжение 20-50 В
- Тип двигателя 2х-фазный ШД

- Модель DM 542S LEADSHINE
- Максимальный ток 4.2A
- Напряжение 20-50 В
- Тип двигателя 2х-фазный ШД

- Модель DM 556S LEADSHINE
- Максимальный ток 5.6A
- Напряжение 20-50 В
- Тип двигателя 2х-фазный ШД

- Модель DM556 LEADSHINE
- Максимальный ток 5.6A
- Напряжение 20-50 В
- Тип двигателя 2х-фазный ШД

- Модель DM860 LEADSHINE
- Максимальный ток 7.2A
- Напряжение 24-80 В
- Тип двигателя 2х-фазный ШД

- ЧАСТОТА ВХОДНЫХ ИМПУЛЬСОВ 200 кГц
- НАПРЯЖЕНИЕ 20-80 В
- ВЫХОДНОЙ ТОК 0.5-5.6 А

- Модель MA860H LEADSHINE
- Максимальный ток 7.2A
- Напряжение 36-80 В
- Тип двигателя 2х-фазный ШД

- Модель Leadshine DMA860H
- Максимальный ток 7.2A
- Напряжение 40
Драйвер Leadshine по всей модельной линейке отличает наличие сервисных возможностей подстройки не только под шаговые двигатели бренда Nema, но и под ШД иных производителей.
Принцип работы электронных драйверных плат довольно прост. В них формируются подаваемые специальной программой компьютера или преобразовательного контролера ЧПУ сигналы управления с параметрами «Шаг&Направление» (Step&Dir;). Затем они преобразуются в сигналы, которые исполняются ШД. Этот вид сигналов изменяет величину силы тока в обмотке статора. Как только происходит изменение статорного обмоточного тока, ротор делает поворот на один шаг, затем на следующий и т.д. В результате формируется дискретное вращение.
Выбор контроллера драйвера отличается необходимостью учета нюансов, которые по ШД Nema определяются тем или иным типом фланца. Рекомендуется приобретать для Nema 23 3-х осевой драйвер, в его маркировочном обозначении присутствует буквенная кодировка «ТВ». Если же подсоединяется к плате ШД Nema с 34-ым фланцем, нужно убедиться в том, что параметр управляющего тока не будет выше 4,2 А и проследить наличие отставания на 15-30% силы тока в нагрузке от управляющего тока. В каталоге Стиплайн присутствуют драйверы Leadshine с весьма высокими по динамическим характеристикам показателями и весьма значительным уровнем дискретности.
Я решил обойтись готовым драйвером. Нужен был недорогой драйвер без корпуса, желательно с возможностью настройки тока и диммированием.
Выбор пал на китайского производителя QIHANGвыпускающего широкий спектр данной продукции.
Характеристики драйвера




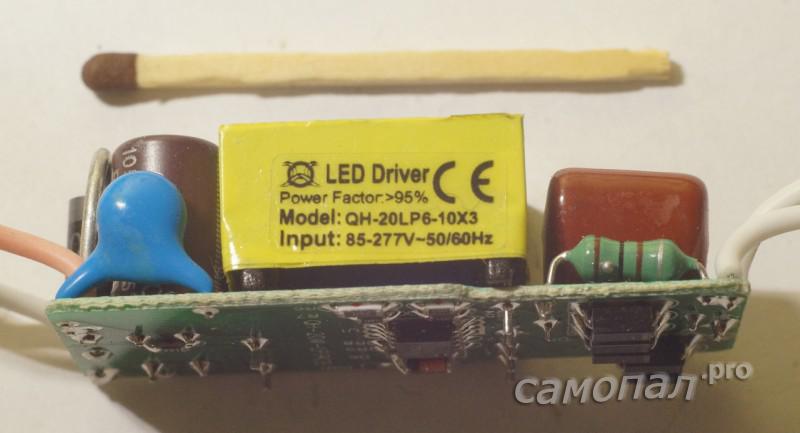
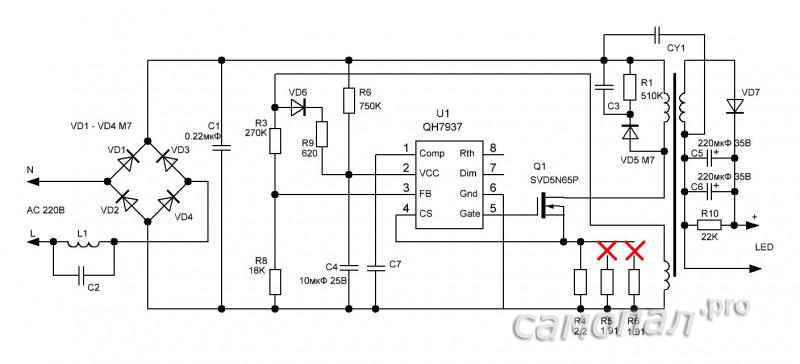
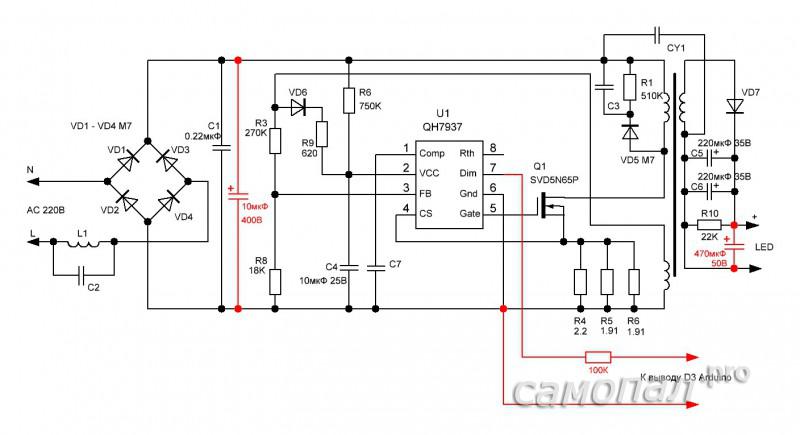
На фото видна микросхема драйвера QH7938. Поиск в интернете приводит к даташиту на эту микросхему на китайском языке
Даташит явно не полный, на схеме не хватает номиналов деталей да и на драйвере элементов явно больше. И что делать с загадочными ногами DIM и RTH?
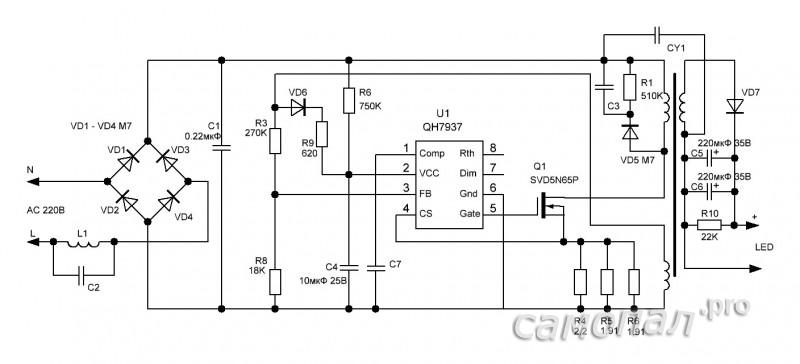
Спасибо пользователю Муськи Sarayan14 который уже ковырял данный драйвер и даже нарисовал схему.
Схему перерисовал и немного доработал
Подключаю цепочку из 9-ти трех-ваттных светодиодов. Все работает, ток стабильный 598мА, но прибор в режиме измерения переменного напряжения показывает пульсации на выходе около 1В или более 3%. Где же заявленные в характеристиках 50мВ?
Доработка №1. Уменьшаем пульсации на выходе.
Для тестирования применяю стрелочный прибор в режиме измерения переменного напряжения и самодельный люксметр, измеряющий пульсации светового потока

Характеристики без конденсаторов
0.9В и 8.7% (пульсации светового потока)
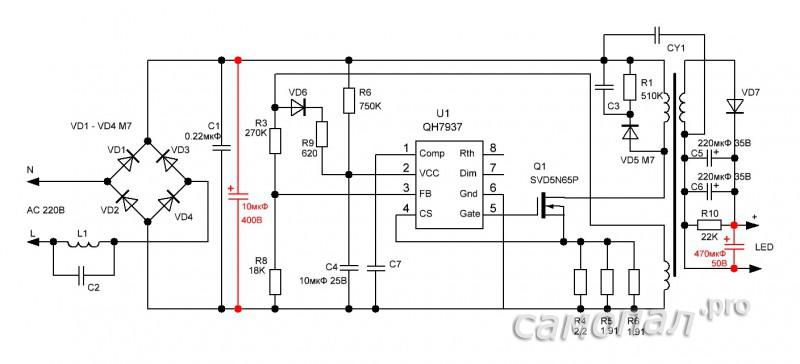
Конденсатор на выходе ожидаемо уменьшат пульсации вдвое
А вот 10мкФ конденсатор на входе уменьшает пульсации в 9 раз
0.1В и 1%, правда добавление этого конденсатора значительно снижает PF (коэффициент мощности)
Оба конденсатора приближают характеристики выходных пульсаций к паспортным

Итак пульсации побеждены при помощи двух конденсаторов из старого блока питания.
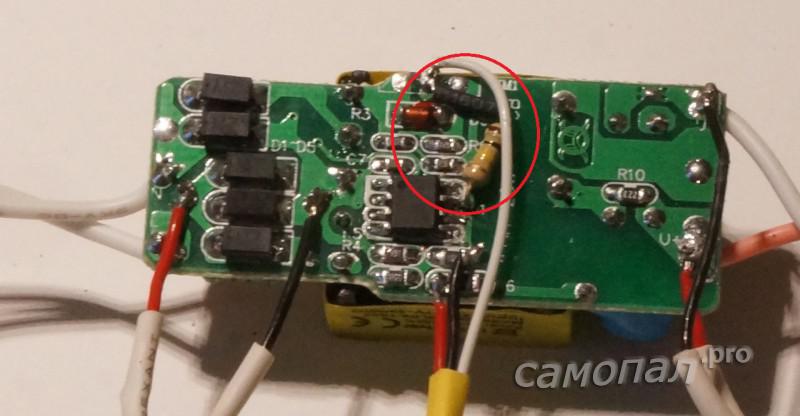
Доработка №2. Настройка выходного тока драйвера
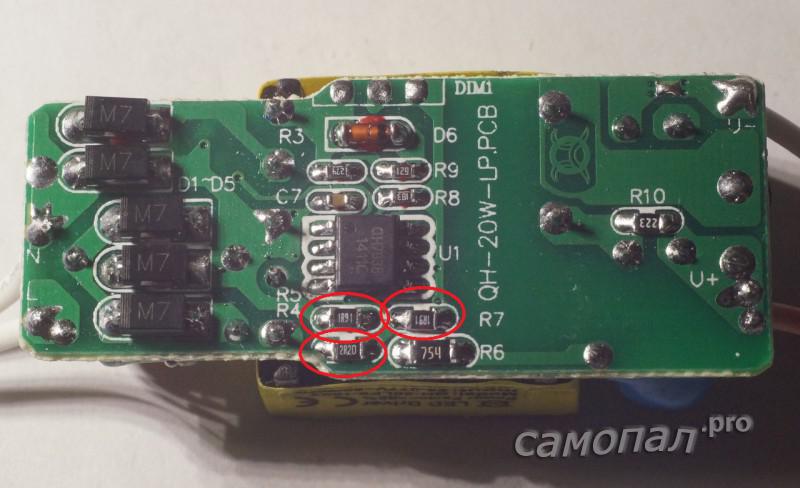
Иногда ток драйвера хочется изменить. Обычно это делается подбором резистора или конденсатора в цепи обратной связи. Как обстоят дела у этих драйверов? И зачем здесь установлены три параллельных резистора малого сопротивления R4, R5, R6?
Все правильно. Ими можно задавать выходной ток. Видимо, все драйверы одинаковой мощности, но на разные токи и отличаются именно этими резисторами и выходным трансформатором, дающим разное напряжение.
Если аккуратно демонтировать резистор на 1.9Ом, получаем выходной ток 430мА, демонтировав оба резистора 300мА.
Можно пойти и обратным путем, подпаяв параллельно еще один резистор, но данный драйвер выдает напряжение до 35В и при большем токе мы получим превышение по мощности, что может привести с выходу драйвера из строя. Но 700мА вполне можно выжать.
Итак, при помощи подбора резисторов R4, R5 и R6 можно уменьшать выходной ток драйвера (или очень незначительно увеличивать) не меняя количество светодиодов в цепочке.
Доработка 3. Диммирование
Подключение к контактам DIMM переменного резистора ни к чему не приводит, кроме того, нога 7 микросхемы драйвера вообще ни к чему не подключена. Значит снова доработки.
Подпаиваем резистор на 100К к ноге 7 микросхемы
Теперь подавая между землей и резистором напряжение 0-5В получаем ток 60-600мА
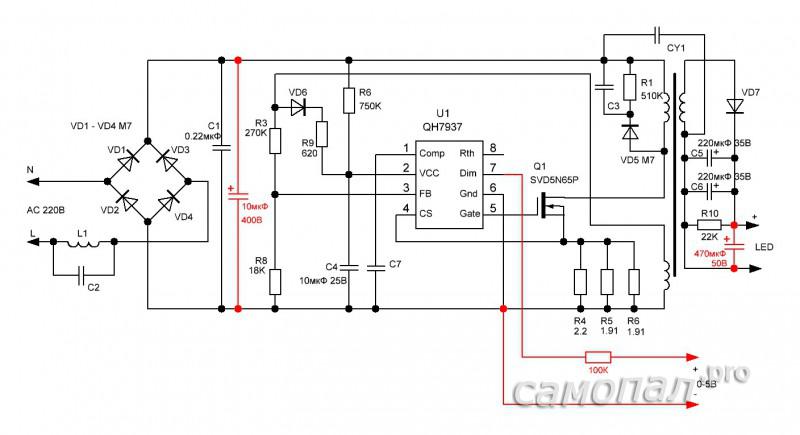
Чтобы уменьшить минимальный ток диммирования, необходимо уменьшить и резистор. К сожалению, в даташите про это ничего не написано, поэтому подбирать все компоненты придется опытны путем. Меня лично устроило диммирования от 60 до 600мА.
Если нужно организовать диммирование без внешнего питания, то можно взять напряжение питания драйвера
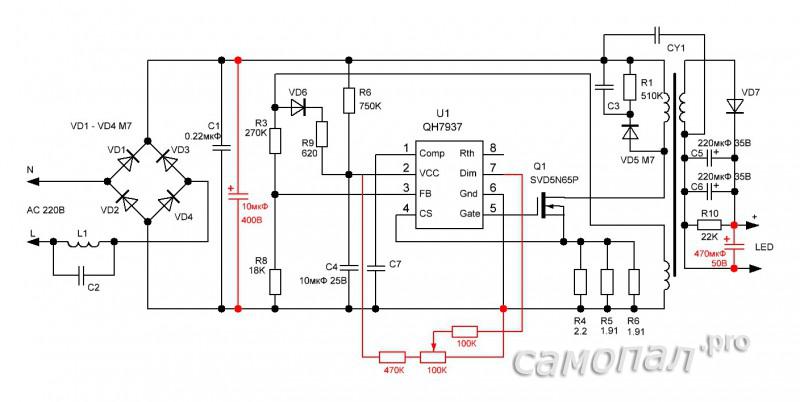
15В (нога 2 микросхемы или резистор R7) и подать по следующей схеме.
Ну и, напоследок, подаю ШИМ с D3 ардуино на диммирующий вход.
Пишу простейший скетч, меняющий уровень ШИМ от 0 до максимуму и обратно:
Получаю диммирование при помощи ШИМ.
Диммирование при помощи ШИМ увеличивает выходные пульсации примерно на 10-20% по сравнению с управлением постоянным током. Максимально пульсации увеличиваются примерно вдвое при установке тока драйвера в половину от максимального.
Проверка драйвера на КЗ
Токовый драйвер должен корректно реагировать на короткое замыкание. Но лучше китайцев проверить. Не люблю я такие штуки. Под напряжением что-то втыкать. Но искусство требует жертв. Закорачиваем выход драйвера во время работы:
Драйвер нормально переносит короткие замыкания и восстанавливает свою работу. Защита от КЗ есть.
Подведем итоги
- Малые габариты
- Низкая стоимость
- Возможность регулировки тока
- Возможность диммирования
Драйверы вполне годятся для тех, кто дружит с паяльником или для тех кто не дружит, но готов терпеть выходные пульсации 3-4%.
Полезные ссылки

281 комментарий на «Доработка недорогих китайских драйверов для светодиодов»
Alexey :У драйвера ток явно маловат. Если он выдаст максимальное напряжение 24В (7 светодиодов) при максимально заявленном токе 220мА, суммарная мощность будет 5.25Вт или по 0.75Вт на светодиод.
Неплохо бы померить при полной нагрузке постоянный ток и переменный ток. По этим цифрам можно прикинуть коэффициент пульсаций и решить, нужно ли туда дополнительные кондеры ставить.
Подскажите, почему при шунтирование трансформатора рекомендуете именно минус выхода с плюсом входа соединять, а не наоборот?
И насколько я понимаю нужен конденсатор малой ёмкости (пФ), что бы только высокочастотку устранять, какой тип лучше?
Бро, как сделать из лед драйвера блок питания (источник напряжения). Перекопал весь интернет. Подскажи
Alexey :Никак
Там обратная связь через токовый шунт. Будет всегда стабилизировать ток.
Проще купить стабилизированный источник напряжения
Читайте также: