
Управление устройствами через блютуз своими руками
Подключение и настройка
Ярким представителем является модуль HM Приложение для управление Ардуино через блютуз модуль В следующем примере мы добавим к светодиоду сервопривод. После того, как адаптер подключается к компьютеру, установите необходимые драйвера в Windows 7 x64 у меня все драйвера поставились автоматом. Но значительно чаще его применяют в проектах, с целью наладить управление микроконтроллером с близких расстояний.
В цикле, раз в секунду происходит увеличение переменной cnt, которая затем с текстовой надписью выводится в последовательный порт на Bluetooth модуль.
В списке обнаруженных устройств отобразится наш Bluetooth-модуль, с новым именем, которое я поменял ранее.
Если вы подключали светодиод в Bluetooth модулю, то он должен мигать, показывая тем самым, что модуль ожидает соединение.
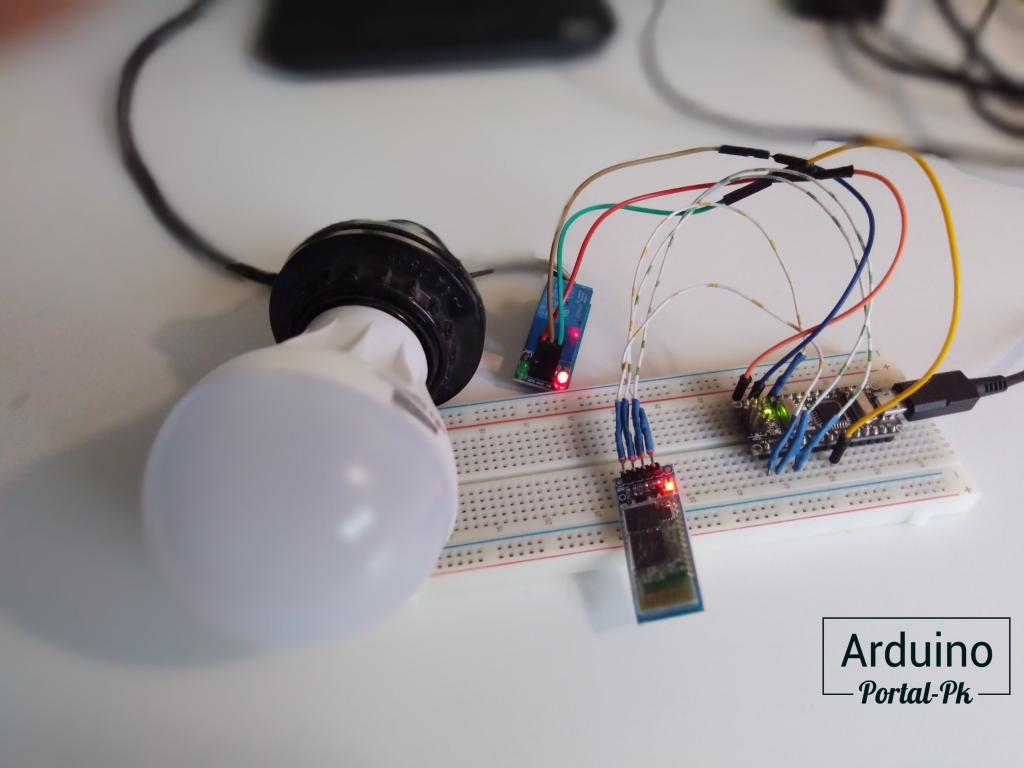
Подключаем модуль HC к плате Arduino по схеме на рис. Подключайтесь к модулю и вводите команды 0 или 1.
Аналогичным образом можно подключаться к модулю при помощи компьютера. После установки приложения нужно загрузить скетч и подключить модуль к плате Ардуино.
Оба модуля представляют собой две спаянные платы.
Как подключить bluetooth-гарнитуру к смартфону ( jabra bt2046 к fly 4410 phoenix )
Видеообзор
Так как Ардуино имеет низкий порог вхождения, под все его модули можно найти большое количество библиотек, разного назначения. По умолчанию — бод.
Bluetooth модуль может работать в одном из двух режимов: master или slave. Его и вводим.
При загрузке скетча нужно отключить Bluetooth-модуль, иначе будет появляться ошибка доступа к Ардуино.
PIO1 pin 24 — индикатор рабочего режима. У вас появится список устройств с адресами — выберите нужное устройство.
У вас активируется поиск устройств, кроме названия HC или HC, вы увидите адрес устройства. Соответственно, он будет удобен для построения тех же умных домов, если дополнить аппаратную составляющую приложением на смартфон. Приложение для управление Ардуино через блютуз модуль В следующем примере мы добавим к светодиоду сервопривод. Отсоединим контакт 34 Bluetooth-модуля от 3,3 В.
За более подробной документацией обращайтесь к PDF. Остается только подумать о более удобном интерфейсе для управления конечным устройством. Питание V — соедините с питанием микроконтроллера. Если соединение не установлено — то светодиод мигает, если установлено, то постоянно горит.
Как подключить беспроводные наушники к телефону на Андроиде через блютуз?
Характеристики Bluetooth модуля HC-05/06
В робототехнике Bluetooth модуль используют для управления различных устройств на Arduino NANO, например, управление машинкой или катером со смартфона. Подключенный к смартфону модуль HC, отображается в списке, выбираем его.
Основные характеристики модуля: Максимальное входное напряжение 5 В; Максимальный ток 45 мА; Скорость передачи данных — бод; Рабочие частоты 2,40 ГГц — 2,48ГГц; Поддержка спецификации bluetooth версии 2. Шаг между выводами в модуле составляет всего 1. Достаточно простая программа, ничего лишнего.
На самом деле все они подключаются одинаково. Принцип действия этих модулей схож, оба модуля основаны на одинаковом чипе, но есть и важные отличия. Шаг между выводами в модуле составляет всего 1.
Подаем на пин K высокий уровень. Включаем Bluetooth на компьютере, идём в Параметры Устройства Bluetooth. Управление Arduino через HC с помощью смартфона. А организовывать связь уже будет аппаратная часть вашего проекта.
Post navigation
В этой статье мы узнаем, как с помощью популярных и не очень дорогих bluetooth модулей HC и HC организовать беспроводную работу своих Arduino проектов. Если мы теперь нажмем кнопку сброса на Ардуино, то в терминале появится строка Hello — это выполнилась функция Serial.
Двунаправленный обмен данными по Bluetooth Следующим шагом будет написание простенькой программы двунаправленного обмена данными между Arduino и компьютером. Но вы можете также спаять его из МК, создав собственный bluetooth модуль для компьютера. Также нужно установить на смартфон или планшет, поддерживающий ОС Android, приложение для отправки данных на модуль. Сфера же применения RC car Arduino bluetooth — огромна и ограничена лишь вашей фантазией.
Конструкция в сборе. Пароль потребуется ввести только один раз, при последующих подключениях сопряжение будет происходить автоматически.

Сегодня мы соберём забавную машинку с дистанционным управлением по Bluetooth. Исходники программы управления под Android в комплекте.
Содержание / Contents
↑ Достойный образец игрушки
У меня двое детей, дочь и сын. Обоим на дни рождения дарят игрушки. То, что дарят дочери, как правило, не вызывает моих негативных реакций. А сыну, как и полагается, дарят всевозможные машинки, танки и прочую технику. Из всей этой прорвы китайщины у меня не вызывает нареканий только игрушечная бензопила, которую я сам и подарил.
О чём это я? Ах, да, об архитектуре! Это я к тому, что при желании отличную игрушку сделать можно. И есть на что равняться.
↑ Будем строить машинку с ДУ!
В один прекрасный день у одной из машинок перестало вращаться правое колесо. Разобрал, проверил моторчик – исправный.
На плате управления три микросхемы – Китай голимый, вменяемой документации найти не смог. Один чип – приёмник радиосигнала с логическими выходами и два мостовых драйвера двигателей. Один из драйверов вышел из строя. Сваять сходу мостовой драйвер двигателя из дискретных компонентов у меня не получилось.
В местном магазине радиодеталей ничего подходящего не было. Вот я и подался в дальние страны за чудо-микросхемами. Собрал пожитки, набил карманы сухарями, налил чашечку кофе, запустил браузер и пошел… на Алиэкспресс .
Нашел подходящий по параметрам драйвер двигателя, заказал сразу два. На всякий случай, вдруг один будет неисправен или сам спалю. Вот тогда и начала зарождаться мысль о своей машинке. После того, как посылка дошла из славного Китая, я успешно заменил драйвер и машинка была отремонтирована.
Не откладывая в долгий ящик идею о своей машинке, я снова подался на Алиэкспресс для выбора основы — шасси будущей машинки. Шасси бывают разные, для наземного транспорта: гусеничные, колесные, с двумя, тремя, четырьмя колесами и т.п.
↑ Как я выбирал шасси
Во-первых, я выбрал наземный вид транспорта, значит и шасси у меня будет наземное. Гусеничные шасси, как правило, дороже и не слишком быстроходные. Двух-трёх-колесные мне кажутся слабо проходимыми, такое шасси сможет ездить только по ровной поверхности.
Я остановился на 4-колесном шасси с приводом (мотором) на каждое колесо . По моему мнению, такое шасси будет обладать отличной проходимостью и скоростью.

↑ Болото мыслей и Техзадание
Когда держишь в руках перспективную вещь, например, в плане возможностей по обвесу модели всевозможными датчиками, серво и пр., начинаешь тонуть в болоте мыслей и трясине перспектив. Но, скажем себе — СТОП! И составим себе мини-ТЗ на прототип с кратким описанием всех узлов.
У нас должна получиться RC-модель наземного траспортного средства с управлением по Bluetooth, с возможностью реверса и плавного регулирования скорости вращения колес.
↑ Что нам потребуется для сборки машинки?

Поворотные колеса отсутствуют, значит, управление поворотом будет как у гусеничного ТС. То есть, для прямого движения, вперед/назад, правая и левая сторона приводов вращаются с одинаковой скоростью. А для осуществления поворота, скорость вращения на одной из сторон должна быть меньше или больше.




Драйвер двухканальный, на левую и правую пару колес. Драйвер имеет логические входы для изменения полярности выхода (направления вращения) и вход ШИМ, можно будет сделать управление скоростью вращения.

Итого: шасси + плата управления + Bluetooth-модуль + программа управления под Android.
↑ Общая схема подключения
Не схема в чистом виде, а именно схема подключения, так как все платы у нас уже готовые, и остаётся их соединить между собой.

↑ Схема в Протеусе
↑ Программа микроконтроллера
Программа МК умеет принимать команды по последовательному интерфейсу с Bluetooth-модуля.
И, в соответствии с командами, управлять левой и правой парой приводов. Реверс и управление скоростью работают при помощи ШИМ.
Код в достаточной мере прокомментирован. Хочу отдельно остановиться на моей реализации обмена данными.
Приём данных у меня реализован через кольцевой буфер. Вещь не новая и реализаций много.
Функции кольцевого буфера у меня вынесены в отдельную библиотеку состоящую из:
заголовочного файла ring_buffer.h и файла реализаций функций ring_buffer.с
Для использования библиотеки её нужно подключить в main.c
Далее, в заголовочном файле необходимо настроить библиотеку. Для настройки необходимо задать всего четыре директивы:
Собственно настраивать больше нечего.
Использование кода В main.c настраиваем USART микроконтроллера.
Вызываем функцию настройки USART
↑ Приём пакета данных
В функции обработчика прерывания приема байта по USART, нам необходимо всего лишь положить принятый байт в кольцевой буфер. Разбор пакета будем делать потом.
Да, я пока пренебрег всякими проверками фрейма.
Теперь нам остается время от времени проверять наш буфер. Для этого я инициировал таймер, в котором я устанавливаю флаг разрешающий проверку кольцевого буфера
В основном цикле добавляем условие для проверки флага.
↑ Как я разбираю пакет
Теперь самое интересное, как я разбираю пакет. В пакете могут передаваться данные размерностью больше байта, знаковые данные, данные с плавающей точкой.
Объясню на примере пакета для управления шасси. Кроме стартового и стопового байтов, в своём пакете мне необходимо передавать одну команду, и два значения ШИМ, для левой и правой стороны приводов. Для команды мне достаточно одного байта, а для каждого значения ШИМ, я передаю int16 — 16 бит, знаковый тип. То есть, я не передаю флаг (байт/признак) направления. Для смены направления, я передаю положительное или отрицательное значение ШИМ.
Приёмный пакет у меня организован в виде структуры.
Вызывая функцию RB_read_buffer ( (uint8_t*)&RxPacket ), в качестве аргумента передаем указатель на структуру приёмного пакета. То есть, при принятом пакете, будет все разложено по своим полочкам в структуре RxPacket. Дальше остается прочитать эти данные из структуры например так:
↑ Передача пакета данных
Хоть в моей программе передача пока не используется, тем не менее, возможность передачи реализована. Передавать данные проще. Точно также, как и для приемного пакета, создадим структуру:
Где, есть стартовый и стоповый байт и информационная часть. Мы уже инициализировали приемник USART.
Для инициирования передачи пакета — вызываем функцию
В данном примере, в этой функции, я записываю только стартовый байт в регистр UDR. Вроде бы немного, но в этой же функции можно реализовать подготовку пакета или еще что-то полезное. И это, на мой взгляд более логично. Логично в плане самодокументирования кода. То есть, если я в коде, просто запишу значение в регистр UDR это может быть воспринято, как передача всего одного байта, а вызывая самоговорящую функцию send_packet () — я говорю о том, что я отправляю пакет данных.
Далее, когда передатчик USART отправит весь байт из регистра UDR — будет вызван обработчик прерывания по передаче.
В обработчике я объявляю переменную указателя и присваиваю её адрес структуры TxPacket. Далее объявляется статическая переменная — индекс передаваемого байта, которой при объявлении присвоено значение 1. Начинаем с одного потому, что первый байт из структуры мы уже отправили. В целом, в структуре можно обойтись и без стартового байта, все равно я его отправляю отдельно, но объявления этого байта оставлено в структуре для понимания того как выглядит пакет.
Условие проверяет, что индекс меньше чем размер пакета. Если условие верно, то записываем байт в регистр UDR:
инкрементируем TxIndex. Когда USART передаст очередной байт, то мы снова попадём в обработчик, но будет передан уже следующий байт из структуры и так будут переданы все байты структуры. Когда TxIndex будет больше чем размер структуры — условие будет не верно и мы попадем в Где будет проинициализирован TxIndex, но в регистр UDR уже ничего не записывается, соответственно обработчик больше не будет вызван до следующего инициирования передачи пакета. Таким образом, процесс передачи полностью автоматический, и даже, если мы изменим структуру пакета, то обработчик переписывать не придётся.
В рамках описания программы МК осталось рассказать про реализацию управления драйверами. Драйвер управляется тремя сигналами: A1 (B1), A2 (B2) и PWMA (PWMB). A1 и A2 предназначены для включения/выключения драйвера и для изменения полярности выхода. На вход PWMA подается ШИМ сигнал с МК — можно управлять скоростью вращения. Для ШИМ сигнала я задействовал два аппаратных ШИМа таймера 1.
Таймер 16-битный, но ШИМ инициализирован на 8 бит. И как вы наверное уже заметили, в приёмном пакете у меня есть два значения для задания ШИМ, для левого и правого привода соответственно. Переменные знаковые 16-битные.
Объясню почему я так сделал.
Во-первых, это пошло от программы под Андроид. Дело в том что в Java нет без знаковых типов и я уже наступал на эти грабли. И для передачи числа от 0 до 255 мне пришлось бы как то извернуться. Я решил пойти более простым путем — отсылаю знаковое 16-бит число. При этом, 16 бит знакового типа это от -32786 до 32768, нам хватит.
Во-вторых, так на мой взгляд более прозрачно — скорость вращения и направления описывается всего одной переменной.
И в-третьих, как не крути, для наших целей меньше чем в три байта не уложиться. Пожертвуем еще одним байтом, зато всё становится понятно, положительное значение ШИМ — прямое вращение, отрицательное значение — обратное вращение.
Для управления приводами я написал функцию drive (int leftPWM, int rightPWM);.
В соответствии со значением ШИМ, осуществляется управление сигналами A1 (B1), A2 (B2) и устанавливается значение ШИМ вызовом функции set_PWM (leftPWM, rightPWM).
Уфф, выдохся…
Подытожим: приняли пакет, разобрали, передали значение ШИМ в функцию drive.
↑ Приложение под Android для машинки
Нет, так подробно, как программу для МК я разбирать не буду. В разработке ПО под Android я ещё новичок и не готов рассказывать достаточно компетентно и глубоко.
Основная функция программы - передача данных модулю HC-06 по каналу Bluetooth. Программа имеет не замысловатый интерфейс.

Сверху выпадающий список спаренных Bluetooth устройств для выбора модуля. Сначала этого списка не было, но уже под конец работы над статьёй решил сделать по-человечески, ведь не все смогут разобраться в исходниках.

1. Управление машинкой с помощью наклона телефона. Нулевое положение телефона — горизонтальное. При наклоне телефона вперед значение ШИМ увеличивается пропорционально наклону в диапазоне от 0 до 255 . При наклоне телефона назад значение ШИМ уменьшается пропорционально наклону в диапазоне от 0 до -255

Что бы повернуть влево или вправо — нужно наклонить телефон вперед или назад и, одновременно, влево или вправо соответственно. Да, как в настоящей машине, пока не поддашь газку поворот не осуществляется.

Можно воспринимать как тачпад. При касании в сером квадрате, значение ШИМ увеличивается/уменьшается в зависимости от места касания, чем дальше от центра вниз или вверх тем больше/меньше значение.
↑ Резюме
Я считаю, что достиг цели! При не очень больших усилиях я создал RC-модель с вменяемым пропорциональным управлением. Машинкой можно с увлечением играть даже взрослому, делая развороты на месте, выписывая сложные пируэты, притормаживая и ускоряясь при необходимости.
И её легко починить при поломке.
↑ Файлы
Документация на драйвер двигателя, PDF
🎁 tb6612fng.pdf 300.88 Kb ⇣ 24
Схема платы MOD-IO, PDF
🎁 mod-io-schematic.pdf 46.37 Kb ⇣ 23
Исходные коды программы микроконтроллера
🎁 carmcu.7z 98.25 Kb ⇣ 22
Исходные коды программы для телефона
🎁 carcontrolandroidsrc.7z 4.96 Mb ⇣ 25
Установочный файл для телефона, apk
🎁 car-control_apk.7z 896.35 Kb ⇣ 22

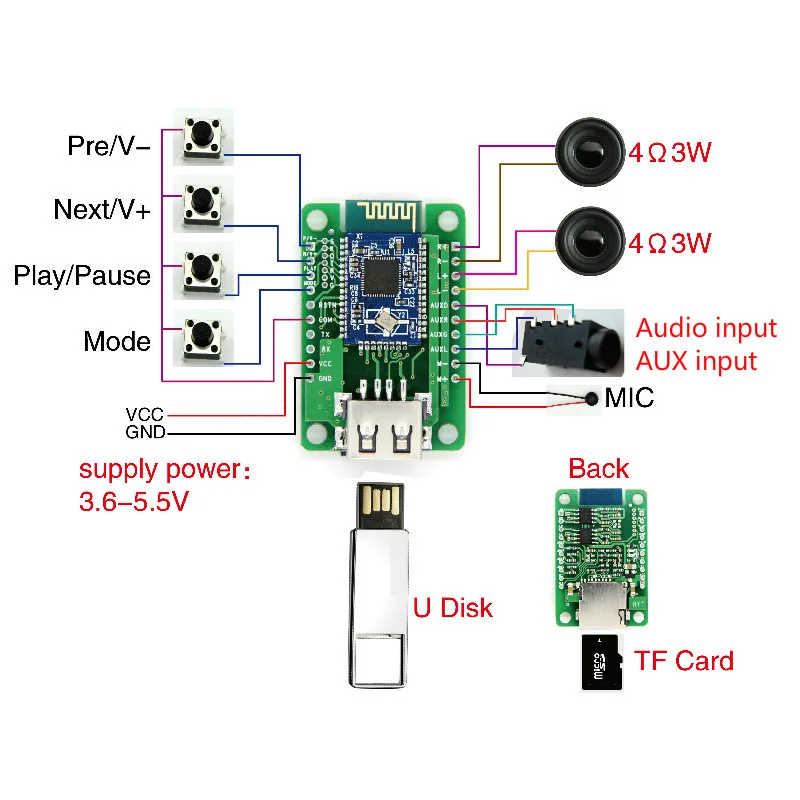
В уроке мы использовали стороннее приложения для Android телефона или планшета. Сегодня мы напишем свое приложение в mit app inventor. Подправим скетч из Arduino урока 11, для работы с низкоуровневым реле. С высоко уровненным рее работать будет без изменения скетча. Чем отличаются высоко уровневые реле от низко уровневых. Низко уровневые включается, когда на сигнальны Пин реле подается LOW. Высоко уровневый включается, когда подадим HIGH. Конструктивные особенности и более подробную информацию ищите в интернете.
Приступим к приложению для Андроида , для этого воспользуемся самым простым решением app inventor 2. Если у вас возникли сложности с данной средой разработки у меня на сайте есть боле простые примеры написания приложений в данной среде разработки : Wi-Fi реле на NodeMCU. Управление Android приложением
Интерфейс программы будет выглядеть вот так.
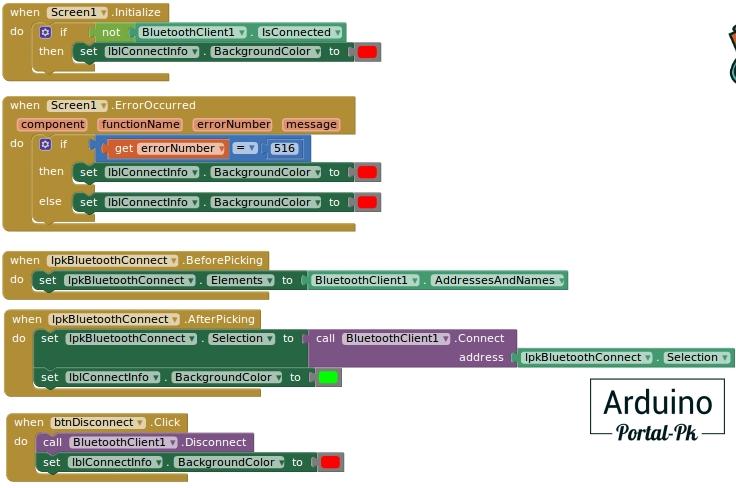
Блок управления и вывода информации на дисплей.
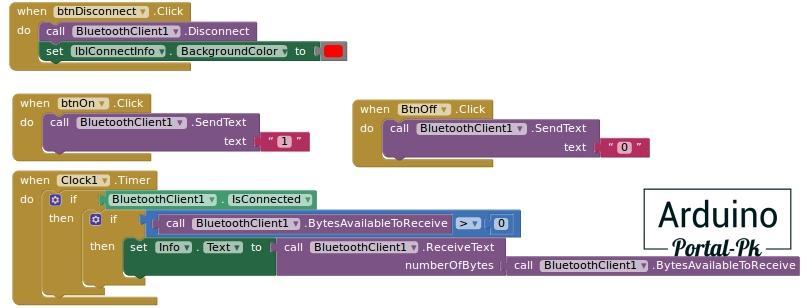
Копка включения отправляет по блютуз каналу значение равное 1. Кнопка отключения отправляет 0.
Cloc1 это часы, проверяют информацию которая пришла по Bluetooth и выводит ее в текстовое поле Info.
Приложение на Android устройстве выгладить вот так.
Подключаем к Arduino UNO реле и модуль по схеме.
Если у вас Arduino NANO, то реле и bluetooth модуль hc 06 подключить по схеме.
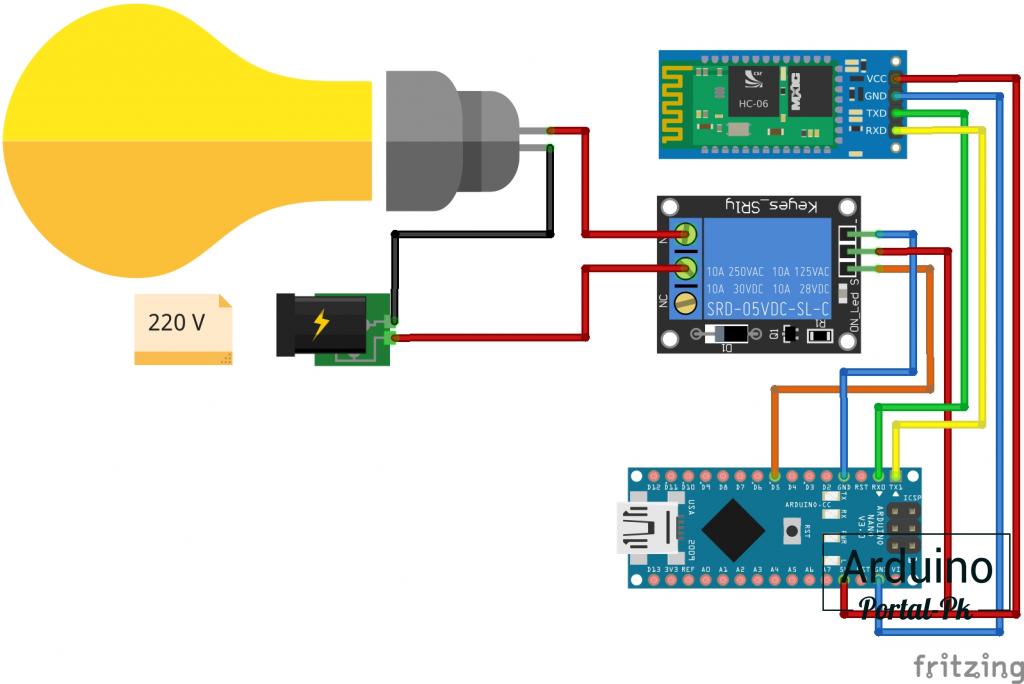
Скетч bluetooth реле ардуино будет вот таким.
Если вы сделали все правильно, то у вас получиться вот такой результат.
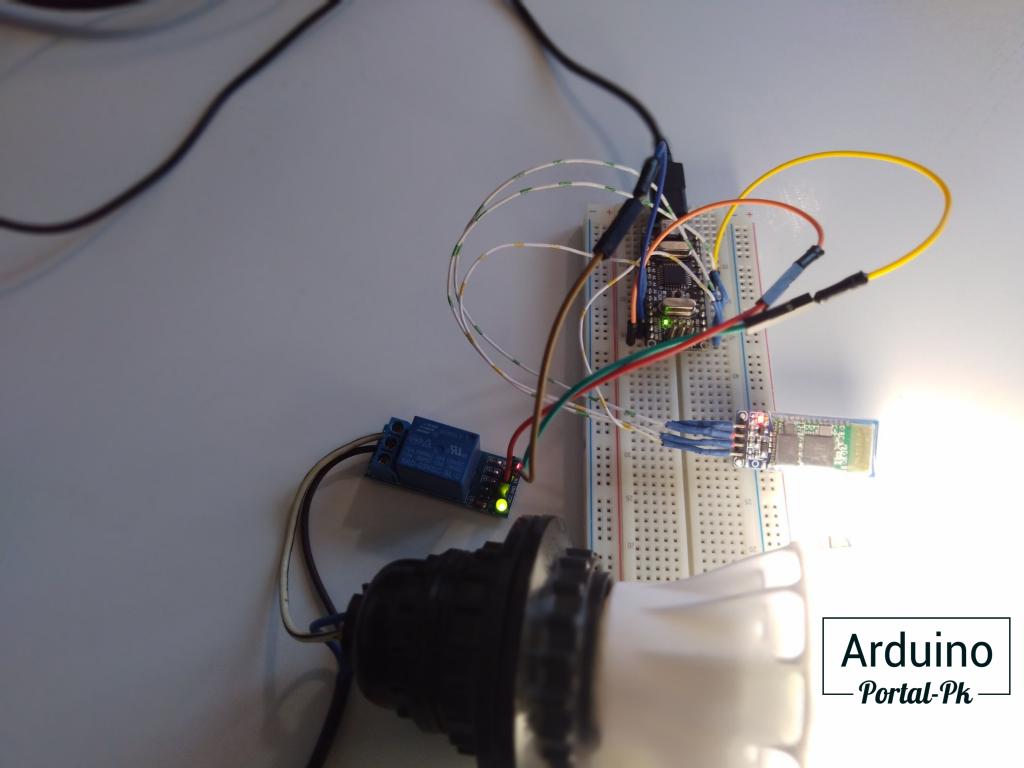
Подключенная нагрузка будет включаться и выключаться . Если у вас работает наоборот возьмите код для Arduino из урока: Bluetooth модуль HC-06. Управление Arduino с телефона.
Сегодня мы разобрали связку ардуино андроид bluetooth . Планирую сделать машину с управлением по bluetooth . И много другое.
Сегодня для охраны автотранспортного средства используются различные системы, начиная от обычных механических блокираторов, заканчивая современными GPS сигнализациями. Последние пользуются все большей популярностью благодаря не только надежной системе защиты, но и удобству управления охранной системой. Кроме этого, благодаря функции обратной связи и возможности дистанционного запуска двигателя управлять любимым автомобилем можно, вообще, без использования штатного ключа.
GSM сигнализация (автомобильная) – это устройство, которое моментально извещает автовладельца о попытке проникновения в машину посредством использования каналов сотовой связи. Эта опция становится возможной благодаря специальному модулю, который осуществляет мониторинг, то есть определяет местонахождения автомобиля, связываясь с базовыми вышками сотовых операторов или спутниковых систем GPS и ГЛОНАСС. Внешне этот модуль напоминает стандартное мобильное устройство, оснащенное экраном, клавиатурой и разъемами для подсоединения различных датчиков (открывание/закрывание дверей, окон и многого другого). Датчики высылают информацию обо всем происходящем на модуль, с которого сигнал тревоги перенаправляется на телефон владельца машины. Благодаря этому можно предупредить угон авто, отключив двигатель и быстро определить местоположение машины.

Как подключить телефон к охранной сигнализации с автозапуском?
Далее все манипуляции нужно проводить в непосредственной близости от автомобиля, так как соединение телефона с сигнализацией происходит по сигналу Bluetooth. Сначала требуется разблокировать центральный замок машины. После чего ввести сигнализацию с автозапуском в режим сопряжения.

Преимущества и основные команды GSM/GPS модуля
GSM сигнализация для авто разрабатывается с учетом новейших технологий, которые не позволят угонщикам использовать компьютерные программы или так называемые грабберы, для отключения охранного комплекса. Эффективность сигнализаций с GPS/GSM модулями обусловлена тем, что владелец автотранспортного средства всегда в курсе того, в каком его машина состоянии и где она находится. Вся информация выводится на специальный брелок либо на телефон. При этом вы можете управлять авто не только с помощью смартфона, на котором будет установлено специальное приложение, но и с обычного сотового телефона, путем отправки смс или звонка. Кроме этого, многие сигнализации, оснащенные модулем, имеют встроенный микрофон, благодаря которому вы можете прослушать, что происходит в салоне автомобиля.
Полезно! Стоит учитывать, что хоть на упаковке с сигнализацией и указывается дальность порядка 1 500 метров, по факту это расстояние будет значительно меньше. Дело в том, что такие измерения проводятся на местности, расположенной вдали от городов, где сигнал не встречает никаких помех. В городской черте такие системы будут ловить на расстоянии 300-500 метров. Поэтому если вы живете на последнем этаже обязательно уточните реальную дальность сигнала.
Это интересно: Новый концепт городского электромотоцикла от BMW
Говоря о преимуществах, стоит упомянуть удобство монтажа такой охранной системы. Для этого не нужно обращаться в специализированный автоцентр. Вам понадобится только закрепить все датчики, вставить сим-карту в соответствующий слот и активировать ее с мобильного телефона.
Итак, при помощи голосового управления, через СМС или со специальным приложением для Android, IOS или Windows вы сможете:
- контролировать состояние сигнализации и получать информацию о ее срабатывании;
- передавать сигнал тревожной кнопки напрямую на пульт охраны;
- прослушивать салон авто;
- включать и отключать режим охраны;
- отключать предварительные или основные датчики удара;
- осуществлять автозапуск для авто без сигнализации;
- полностью блокировать мотор.
Настройки сигнализации в машине через телефон
Теперь мы получим полный контроль с телефона над всеми скрытыми настройками сигнализации. С главной страницы открывается быстрый доступ к управлению центральным замком, запуском двигателя и открытию багажника.
Причем изображение автомобиля динамически отображает его состояние. Например, при работе аварийки или поворотников они также мигают на картинке. А при заведенном двигателе контур обведен голубым свечением
В слайдере выше отображаются текущая скорость, напряжение в электросистеме, температура, и т.д. Для перехода в основное меню нужно нажать на иконку в левом верхнем углу.
Доступны следующие настройки сигнализации:
Освобождаем руки и глаза
Не зря сейчас берут штраф за разговор по телефону за рулем. Это очень отвлекает водителя, так же как и выбор песни или набор смс. Однако взаимодействия с телефоном во время поездки не избежать, и единственный способ сделать его более безопасным — использовать голосовое управление.
На iPhone 4S с такими обязанностями хорошо справляется Siri. Кстати, и Siri можно запускать голосом (инструкция здесь). Если Siri на вашем iPhone нет, можно воспользоваться приложением Vokul, которое разработано специально для использования в автомобиле.
Также неплохие возможности управления голосом демонстрируют смартфоны с Android 4.1, однако если вам нужен настоящий помощник, вроде Siri, то нужно будет обзавестить дополнительными приложениями, например: Voice Actions for Android, Vlingo, Edwin.
Надеемся, что наши советы помогут вам удачно объединить ваш автомобиль и ваш смартфон. Всегда помните о безопасности за рулем и не подвергайте себя и других участников движения неоправданному риску.

Автоматическое охлаждение и обогрев салона автомобиля
Еще одна функция удаленного управления автомобилем с помощью GPS/ГЛОНАСС терминала – это автоматическое поддержание температурного режима в салоне. В зависимости от показаний датчиков температуры и влажности можно настроить автоматическое включение-выключение кондиционера и обогрева салона, когда значения выходят за пределы определенной отметки.
Решить эту задачу и предусмотреть, чтобы при значениях в пределах нормы и обогрев, и кондиционирование были отключены, можно самостоятельно с помощью настройки алгоритма Easy Logic. Так будет выглядеть готовый алгоритм:

Разберем его подробно. Представим, что к терминалу подключены аналоговый датчик температуры – ко входу 0 и аналоговый датчик влажности – ко входу 1. К выходу 0 подведено реле включения/выключения обогрева, а к выходу 1 – включение/выключение кондиционирования.
Затем терминал начинает последовательно проверять условия включения систем обогрева или охлаждения. Первой проверяется температура ниже нормы – при выполнении условия включается обогрев, после чего через 15 секунд проверка запускается вновь, которая продолжается до тех пор, пока температура не поднимется выше этого уровня.
Если показания с датчика температуры не опускаются ниже нормы, выполняется проверка верхней границы. Если температура выше, то включается кондиционирование по аналогии с обогревом. Если обе проверки не выявили отклонений от нормы температуры, в конце проверяется уровень влажности со второго датчика. При превышении нормы влажности в салоне одновременно запускается кондиционирование для осушения воздуха и обогрев для компенсации охлаждения и через 15 секунд процедура проверки повторяется.
По аналогии можно добавить любые условия и действия для создания наиболее комфортного температурного режима так, как необходимо заказчику.
Системы Призрак

Если говорить о стоимости этих охранных систем с GPS модулями, то:
Это интересно: Porsche задумывается о создании собственного мотоцикла
Так мобильный телефон превращается в бортовой компьютер

Smart Control Lite
Чтобы получить возможность использовать мобильный телефон в качестве бортового компьютера и диагностического прибора, вы должны подключить его через Bluetooth или WLAN к разъему OBD-2.
После этого с помощью соответствующего приложения вы сможете наблюдать за расходом топлива, и использовать смартфон для отображения не только скорости, но и температуры охлаждающей жидкости, крутящего момента, ускорения и многих других параметров.
Для заездов по пересеченной местности и гоночных покатушек будет полезна информация о тормозном пути, времени прохождения круга и угле наклона кузова.
Кроме того, вы сможете получить данные о содержащихся в системе кодах ошибок, чтобы своевременно вмешаться при возможных неполадках.
Примечание: из-за ограничений, которые имеют Bluetooth-протоколы под iOS, с iPhone совместимы только OBD-2-модули с WLAN-связью.
Первый автомобиль с ДУ
Идея оборудовать детский автомобиль с электродвигателем контроллером впервые появилась у инженеров компании Peg Perego, одного из лидеров на рынке детского электротранспорта. Первая модель, которой можно было управлять удалённо стала Go Buggy Go, до 2012 года носившая название RC Buggy, предназначенная для детей в возрасте от 1 до 3 лет
В отличие от распространённых на то время моделей, где родителям было необходимо постоянно находиться возле маленького водителя, с пультом можно было делать это удалённо, сидя на лавочке, либо медленно прогуливаясь. Пульт RC Buggy позволял менять траекторию движения при помощи специального колёсика, имитирующего руль. Такое решение сделало модель бестселлером, а идея стала настолько успешной, что большинство современных моделей детских электромобилей комплектуются пультом дистанционного управления.
Читайте также: