
Трасса для квадрокоптеров своими руками
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.
Вид от первого лица (FPV)
Видеокамера
Подвес
Бесколлекторный подвес
- Бесколлекторные моторы постоянного тока (BLDC — Brushless Direct Current Motor) или (PMSM — Permanent Magnet Synchronous Motor) или (Вентильные электродвигатели (ВД)) — обеспечивают быструю реакцию с минимальной вибрацией, однако требуют присутствия отдельного (и специализированного) бесколлекторного контроллера постоянного тока.
- Чтобы автоматически поддерживать уровень камеры, где-то вокруг камеры (обычно под её креплением) устанавливается инерциальный измерительный блок (IMU), состоящий из акселерометра и гироскопа, так чтобы положение камеры (относительно земли) можно было отслеживать. Показания блока отправляются на отдельную плату бесколлекторного контроллера постоянного тока (часто устанавливаемую прямо над подвесом), который вращает моторы, так, что положение камеры остаётся в определенной ориентации, несмотря на любое перемещение дрона.
- Сама плата контроллера включает в себя встроенный микроконтроллер. Бесколлекторный контроллер постоянного тока карданного подвеса обычно можно подключить непосредственно к каналу на приёмнике (в отличие от контроллера полёта), поскольку он реагирует на изменения ориентации камеры, а не ориентации БПЛА, и, следовательно, не зависит от контроллера полёта.
- Обратите внимание, что поскольку GoPro является популярной экшн-камерой, большинство бесколлекторных подвесов созданы для использования с одной или несколькими моделями GoPro (исходя из размеров GoPro, центра масс, местоположения камеры и т.д.). Вы также заметите, что BLDC подвесы почти всегда имеют демпфирование, которое сводит к минимуму вибрацию, передаваемую от дрона к камере.
Радиоуправляемый сервоподвес
- В основе радиоуправляемого сервоподвеса — сервопривод, как правило, предлагает более медленное время отклика, по сравнению с бесколлекторными подвесами, и излишнюю вибрацию. При этом сервосистемы значительно дешевле бесколлекторных, а 3-контактные сервоприводы в большинстве случаев могут быть подключены непосредственно к полётному контроллеру, что позволяет воспользоваться встроенным в ПК — IMU, для определения уровня относительно земли, и последующего перемещения сервоприводов.
Видеопередатчик (VTX)
Мощность видеопередатчика
Частоты/Каналы видеопередатчика

Большинство видеопередатчиков работают на одной из ниже перечисленных частот. Обратите внимание, что, поскольку вы, вероятно, уже будете использовать стандартную аппаратуру управления, которая работает на определенной частоте, правильным будет выбрать видеопередатчик так, чтобы их частоты не совпадали. Например, если ваше пульт управления работает на частоте 2.4 ГГц, вам следует обратить внимание на видеопередатчик с рабочей частотой: 900 МГц, 1.2ГГц или 5.8ГГц.
900МГц (0.9ГГц)
1.2ГГц (от 1.2 до 1.3 ГГц)
- Используется для дальних FPV полётов, поскольку предлагает хорошее расстояние
- Много разных антенн на рынке
- Частота, как правило, используется множеством других устройств
- Стены и препятствия оказывают большее влияние, чем более низкая частота
- Средний/длинный диапазон
2.4ГГц (от 2.3 до 2.4ГГц)
- Используется для FPV на большие расстояния с небольшим количеством препятствий
- Одна из наиболее широко используемых частот для беспроводных устройств
- Доступны многие аксессуары (антенны, передатчики и т.д.)
- Не следует использовать рядом с параллельно работающими на аналогичной частоте RC передатчиками или другими устройствами, которые могут создавать помехи.
- Может работать с другими частотами, но не будет рассмотрено в этом разделе.
5.8ГГц
- Отлично подходит для применения на малых расстояниях
- Стены и другие препятствия оказывают существенное влияние на дальность
- Антенны маленькие/компактные
- Лучше всего подходит для FPV в дрон-рейсинге
Разъёмы видеопередатчика
Не все видеопередатчики имеют одинаковые разъёмы, поэтому важно знать, какой разъём установлен в выбранной камере, а также, посмотреть, возможно ли подключение и работа с выбранным видеопередатчиком. Самые популярные разъёмы — композитные, мини/микро USB и 0.1-дюймовые разъёмы (аналоговые). На рынке имеется ряд адаптеров/переходников, например: 0.1″ FPV Tx разъём — miniUSB для использования с камерой GoPro, что значительно упрощает использование таких продуктов.
Некоторые видеопередатчики также могут иметь аудиовход, тем не менее в большинстве случаев шум издаваемый силовой установкой будет заглушать любой звук, который вы надеетесь записать. Если вам нужен звук, обязательно расположите микрофон как можно дальше от моторов (потребуется немало испытаний, чтобы найти макс. оптимальное место) и выберите совместимый приёмник.
Антенна видеопередатчика
Видеоприёмник (VRX)
Антенна видеоприёмника
Видеодисплей
ЖК монитор (LCD монитор)
- При рассмотрении ЖК монитора важно знать различие между настольным/компьютерным ЖК монитором или ЖК телевизором и тем, который предназначен быть портативным. Телевизионный/компьютерный монитор почти всегда имеет разъём питания, совместимый со стандартным компьютерным кабелем питания (потребляет переменный ток напрямую), что делает его очень сложным для использования с АКБ. ЖК/OLED дисплей, который должен быть более портативным, зачастую потребляет постоянный ток и требует внешнего трансформатора для подключения к сети (A/C).
- Размер, частота обновления и качество отображения дисплея, используемого для FPV применения варьируются от небольших мониторов с зернистыми изображениями, те что обновляются несколько раз в секунду, до больших дисплеев, которые в сочетании с правильным видеопередатчиком и приёмником, отображают большие HD изображения без каких либо явных задержек. Имейте в виду, что любой выбранный вами 2D-дисплей должен быть подключен к источнику питания и установлен, либо внутри базовой станции БПЛА (описанной ниже), либо посредством крепления FPV монитора на аппаратуре управления.
FPV очки
-
широко используются в FPV из-за их более доступной цены, совместимости с одним источником видеосигнала (с одной видеокамеры) и простоты использования с внешним аккумулятором. Некоторые модели включают в себя видеоприёмник; комплекты приходят с камерой, видеопередатчиком, FPV очками (с встроенным видеоприёмником) и внешним аккумулятором, а также обеими антеннами.
- Качество видео, предлагаемое недорогими FPV очками, может быть довольно низким, поэтому если бюджет имеет значение, примите во внимание, что вы можете получить лучшее впечатление от ЖК-монитора большего размера по той же цене, что и FPV очки.
Отслеживание головы
- Отслеживание головы по существу тоже самое, что и отслеживание движения, а именно, измерение трехмерной ориентации/углов в отличие от линейного движения. Сенсорный комплекс составляют чипы MEMS акселерометра, гироскопов или инерциальных измерительных модулей (IMU). Датчики устанавливаются (или встраиваются) в FPV/VR очки и отправляют данные в микроконтроллер для интерпретации данных датчика в виде углов, который затем отправляет данные, либо посредством аппаратуры управления (для моделей более высокого уровня), либо через отдельное беспроводное передающее устройство. Идеальная система отслеживания головы совместима с передатчиком, таким образом углы могут быть отправлены с помощью передатчика по двум свободным RC каналам.
3D/Виртуальная реальность
- Occulus Rift, Samsung Gear, Morpheus, VR-очки на базе смартфона и множество других 3D/VR-дисплеев с головным креплением могут быть адаптированы для использования с беспилотниками. Несмотря на то, что эти устройства обычно создаются для трёхмерных компьютерных/консольных игр или в качестве альтернативы телевизору, эти устройства изначально совместимы с 3D и зачастую имеют встроенные датчики трекинга головы, становясь всё более интересными для беспилотного FPV сообщества.
Smart устройства
- Смартфоны, планшеты или ноутбуки могут быть использованы для отображения видео в режиме реального времени. Их батареи являются встроенными, а сами устройства лёгкие. Сложность использования интеллектуальных устройств заключается в том, что большинство приёмников не предназначены для приёма видеосигнала от беспроводного видеоприёмника (один из двух проводной или беспроводной). Ноутбук или планшет с встроенной или USB-видеокартой может получать нормальное композитное видео. Смартфон в настоящее время лучше всего работает с видео, отправляемым по Wi-Fi (от Wi-Fi камеры к Wi-Fi адаптеру). Использование Wi-Fi видеосигнала GoPro и мобильного приложения является одним из самых простых способов реализации FPV, однако стоит отметить, что диапазон сигнала Wi-Fi камеры сильно ограничен (10-20 метров). Поскольку смартфоны широко распространены, а беспилотники — последний писк моды, производители регулярно выпускают новые продукты, из которых извлекают выгоду, поэтому прежде чем принять решение, хорошенько подумайте.
Экранное меню (OSD)
- Экранное меню (OSD) позволяет пилоту видеть различные сенсорные данные, отправляемые с дрона. Одним из самых простых способов выведения данных на экран является использование камеры с аналоговым выходом и размещение экранной платы между выходом камеры и видеопередатчиком. Плата OSD адаптера имеет входы для различных сенсоров и будет накладывать данные на видео, таким образом пилот получит видео с уже наложенными данными телеметрии.
Соображения касательно расстояния удаления
- Как вы уже успели заметить, работа на большом расстоянии зависит главным образом от мощности передатчика (аппаратуры управления, а также видео, если применимо). Обычно RC-передатчики включают в себя RF-систему, состоящую из джойстиков и переключателей, электроники и RF-передатчика, и менее дорогих RC-элементов, эта система почти всегда представляет собой единое целое. Модели более высокого уровня часто имеют радиочастотный модуль, который можно заметить в виде коробки, расположенной на тыльной стороне аппаратуры управления. В Северной Америке это также законное требование, чтобы БПЛА оставался в поле зрения пилота (для информации). Тем не менее законы меняются, поэтому лучше проконсультироваться, прежде чем пытаться выполнять беспилотные операции на больших расстояниях.
Питание
БПЛА/Дрон
- Двигатели: большинство двигателей БПЛА среднего размера, как правило, работают при напряжении 11.1В или 14.8В.
- Контроллер полёта, приёмник, GPS: в идеале они должны получать питание от BEC от одного из ESC.
- Приёмник отслеживающий положение головы: он будет также работать от BEC.
- Сервоподвес: Сервоприводная система подвеса может получать питание от одного из BEC на ESC и работать при напряжении 5В.
- BLDC подвес: Некоторые BLDC подвесы могут подключаться к зарядному разъёму основного аккумулятора, в то время как другим может потребоваться определенное напряжение. Проверьте характеристики подвеса, который вы покупаете.
- Камера: Камеры, используемые для FPV полёта, имеют тенденцию работать при 5В (от BEC) или 12В (от основного аккумулятора). Большинство экшн-камер имеют собственную встроенную батарею.
- Видеопередатчик: Большинство работает при 5В и может питаться от BEC.
- Дополнительная электроника (освещение, парашют и т.д.): 5В.
Пилот
Базовая станция
- Основную батарею, возможно, используемую для питания ЖК-монитора и/или FPV очков и, возможно, видеоприёмника.
- Вспомогательную батарею для передатчика и/или видеоприёмника.
- Крепление для ЖК-монитора и/или место для FPV очков.
- Крепление для видеоприёмника.
- Место для хранения аппаратуры управления.
- Крепление для антенны большой дальности (или место для переносной направленной антенны)
- Место для зарядного устройства для основного аккумулятора (ов).
- Место для запасных частей для дрона (пропеллеры, моторы, аккумуляторы, элементы рамы).
Антенный трекер

Антенный трекер — это электромеханическое устройство, которое отслеживает положение дрона в трёхмерном пространстве, используя GPS координаты, и, зная местоположение GPS трекера, направляет антенну в сторону беспилотника. Антенные трекеры обычно используются в дальнобойных миссиях, и на рынке не так много коммерческих продуктов. Трекер состоит из GPS приёмника, компаса (а иногда и IMU), микроконтроллера, приёмника данных (для приёма GPS-координат дрона), одного поворотного и одного наклонного мотора, механической рамы, направленной антенны и аккумуляторной батареи. Чтобы уменьшить отрицательное влияние препятствий, системы антенного трекера поднимаются над землей с помощью штатива.

Квадрокоптер своими руками — сложная, но вполне осуществимая задача для людей, которые имеют базовые представления о радиотехнике. Существует несколько основных вариантов домашнего конструирования дрона.
Что нужно для сборки квадрокоптера
Набор деталей и расходных материалов может меняться в зависимости от того, какой именно дрон нужно сделать своими руками. Но базовый список элементов выглядит следующим образом:
- рама, на которой будут закреплены все остальные детали;
- четыре специальных двигателя для дрона;
- четыре пропеллера;
- четыре регулятора оборотов для винтов;
- два красных и два черных провода в силиконовой оболочке для моторов;
- силовой разветвитель 3,5 мм;
- литий-ионный аккумулятор — один или несколько;
- плата управления;
- зарядное устройство для батарей питания;
- пульт радиоуправления.
Чтобы собрать квадрокоптер из запчастей, практически все специфические детали можно приобрести в Интернете, например, через сервис АлиЭкспресс.
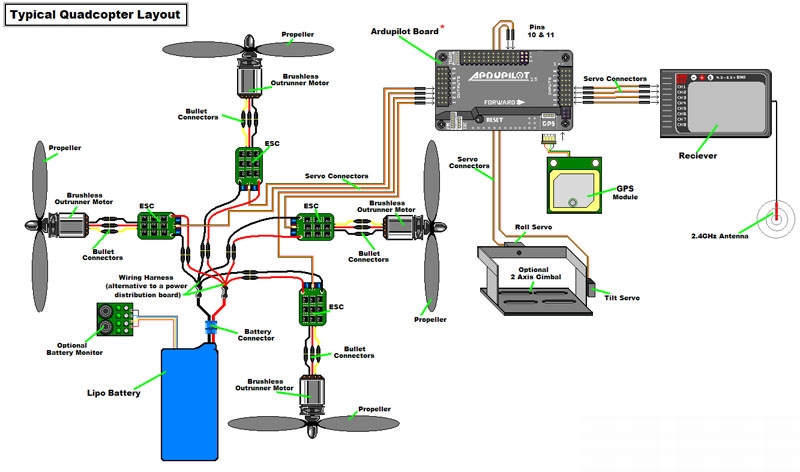
Чертежи и схемы квадрокоптеров
Чертежи для сборки квадрокоптера могут незначительно различаться между собой. Детали зависят от габаритов собираемого своими руками дрона, от его формы и конструктивных особенностей. Но базовый чертеж обычно предлагает сделать маленький квадрокоптер на крестообразной силовой раме с размерами 363 на 363 см. Параметры корпуса при этом составляют около 107 на 107 см, в таком случае в дроне без проблем размещаются основные детали.

Стандартно самодельные дроны собирают на рамах из четырех лучей
Структурная схема квадрокоптера выглядит очень просто. В центре конструкции на силовой раме всегда располагается электронная плата управления. По четырем углам на равном расстоянии друг от друга нужно поставить двигатели с закрепленными на них пропеллерами. В корпус в центре конструкции монтируют также элементы питания и радиодатчики для удаленного пилотирования.

Регуляторы оборотов на лучах необходимы для дронов, предназначенных для маневрирования
Важно! При сборке дрона своими руками нужно следить за тем, чтобы основная масса конструкции приходилась на центр и не смещалась в ту или иную сторону.
Как сделать самодельный квадрокоптер из бумаги
Простейший вариант сборки предлагает выполнить корпус аппарата из плотной бумаги. Такой квадрокоптер своими руками для начинающих будет очень легким, и управлять им в ветреную погоду не получится. Зато и больших расходов он тоже не потребует.
Сборка корпуса из бумаги
Прежде всего, при сборке бумажного дрона необходимо подготовить шаблон. Его можно нарисовать самостоятельно по одному из найденных чертежей, но гораздо проще скачать готовый вариант.

Бумагу для дрона нужно брать плотную, чтобы она не сминалась в процессе использования
Из готового шаблона острыми ножницами или ножом вырезают отдельные детали. После этого приступают к склеиванию частей — использовать можно ПВА или Момент по желанию. Важный нюанс состоит в том, что клея нужно наносить совсем немного и сразу же убирать его излишки. Даже небольшие застывшие капельки в конечном итоге влияют на массу и балансировку коптера.
Промазанные детали прикладывают друг к другу и слегка прижимают. После этого корпус оставляют сохнуть, а потом визуально проверяют качество сборки.
Установка электронной начинки
Чтобы бумажный дрон взлетел, на него необходимо монтировать электронику. Пошаговая инструкция для квадрокоптера своими руками выглядит так:
- сначала в центральной части рамы снизу устанавливают чипами вверх полетный контроллер с микропроцессором, полевыми транзисторами и сенсорами;
- затем при помощи той же клейкой ленты по углам располагают моторы и подводят к ним провода, закрепив их скотчем во избежание наматывания на винты;
- в центре рамы на двусторонний скотч ставят аккумулятор и соединяют его с моторами.
Готовый квадрокоптер своими руками из подручных материалов можно испытывать при помощи заранее приобретенного пульта управления.

Бумажный коптер требует использования максимально компактных и легких деталей при сборке
Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

При сборке рамы дрона из палочек нужно следить, чтобы конструкция была пропорциональной
Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

После закрепления ножек мини-дрона нужно убедиться, что конструкция стоит на поверхности ровно
Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Как сделать квадрокоптер с камерой своими руками
В домашних условиях реально провести сборку не только примитивного дрона, но и профессионального квадрокоптера своими руками. Для этого понадобится приобрести базовые детали — аккумуляторы, контроллер полета, моторы, провода и пульт ДУ. Также нужно купить камеру — компактную и легкую, но с хорошим разрешением.
Сборка рамы
Бумажная и картонная рама для коптера с камерой не подойдет, конструкция будет слишком тяжелой. При желании можно заказать готовую основу для дрона в Интернете. Но очень просто выполнить сборку и своими руками, например, из водопроводных пластиковых труб или легких алюминиевых профилей. Скрепляют детали между собой при помощи винтов или фитингов. На концах лучей рамы снизу можно сразу же прикрутить ножки, на которых будет стоять дрон.

Алюминиевая рама достаточно легкая и при этом очень прочная
Установка моторов
На каждом из лучей рамы необходимо установить по мощному компактному мотору. Закрепить их можно при помощи термоклея или резьбы. На верхнюю часть двигателей надевают винты. Лопасти для квадрокоптера своими руками обычно не делают — это требует использования фрезеровочного станка. Купить готовые пропеллеры намного проще и практичнее.
Сборка электроники
В центральной части аппарата устанавливают плату управления. Крепить микросхему лучше всего горячим клеем. Двусторонний скотч для массивных конструкций используют реже, поскольку он не обеспечивает надежной сцепки.

Контроллер для дрона с камерой следует выбирать подороже, с датчиками и режимами полета
Установка камеры
Для сборки летающего дрона своими руками для съемки оптимально использовать GoPro — легкую, небольшую по размерам экшн-камеру. В верхней или нижней части рамы для нее необходимо сделать специальную пенопластовую платформу, которая станет гасить вибрации от корпуса при полете. Камеру для надежности плотно закрепляют резинками.
Камеру на дроне можно закрепить в любой точке с хорошим обзором и минимумом вибрации
Установка регуляторов оборотов и подключение проводов
На данном этапе квадрокоптер для видеосъемки своими руками почти готов. Остается только соединить регуляторы оборотов с моторами и контроллером, а потом подключить плату управления к батареям питания. Также нужно не забыть вывести на полетный чип провода от камеры.

Моторы дрона с камерой в сумме должны давать подъемную силу, превышающую вес аппарата
Как сделать гоночный квадрокоптер своими руками
Сборка гоночного дрона по сути ничем не отличается от конструирования обычного квадрокоптера. Разница состоит в подходе к выбору деталей — нужно уделить особое внимание моторам, раме и винтам.
В случае с гоночным дроном основу лучше приобретать готовую. Она обеспечит оптимальную балансировку аппарата. Хорошим вариантом для сборки станет легкая и прочная рама из карбона со стандартными четырьмя лучами.
Сборка моторной части
Моторы для гоночного коптера закрепляют на лучах рамы винтами в специальных отверстиях. Двигатели должны быть достаточно мощными — например, хорошо подойдут 2205-2600 KV. В центральной части лучей устанавливают регуляторы оборотов и соединяют проводами с моторами. Винты для сборки гоночного дрона можно выбирать с двумя или тремя лопастями — первые дадут большую скорость, вторые облегчат процесс маневрирования.

Регулировка оборотов гоночному коптеру нужна обязательно, иначе он не сможет маневрировать
Установка электронной части
Стандартным способом на центральной пластине рамы закрепляют плату управления. Ее можно посадить на горячий клей или просверлить отверстия и зафиксировать небольшими винтами. В последнем случае конструкция после сборки получится надежнее. К раме прикрепляют приемник сигнала, который будет передавать команды на плату управления. Аккумулятор традиционно монтируют в нижней части устройства отдельно от микрочипа.

Камеру в гоночном дроне фиксируют в специальном гнезде на готовой раме
Подсоединение проводов
На финальном этапе сборки остается подключить к плате управления провода, отходящие от камеры и моторов. Сам микрочип при этом соединяют с аккумулятором.

При прокладке проводов нужно следить, чтобы они оставались подальше от лопастей дрона
Как сделать квадрокоптер для человека своими руками
Дрон для человека — пока что крайне редкий, небезопасный и дорогостоящий вариант для самостоятельной сборки. Общедоступных инструкций того, как самому в домашних условиях сделать квадрокоптер с огромной подъемной силой, пока не существует, поскольку обладателей таких аппаратов очень немного.
Однако краткий алгоритм создания грузоподъемного дрона можно описать, опираясь на стандартную схему.
Для сборки самодельного большого квадрокоптера подойдет только металлическая рама из стали, карбона или прочного алюминия. Другие конструкции просто не смогут поднять всю электронику и владельца дрона.

Болты для скрепления элементов рамы должны быть рассчитаны на нагрузку свыше 100 кг
Установка моторов и регуляторов оборотов
Двигатели для мощного квадрокоптера своими руками устанавливаются на лучах силовой рамы. Принципиальное внимание нужно уделить их производительности — суммарная тяга должна быть не меньше 120 кг. Добиться такого показателя реально при помощи восьми бесколлекторных моторов на 3 кВт каждый. К двигателям необходимо докупить регуляторы не менее 80 А. Детали соединяют между собой при сборке проводами, а к раме крепят исключительно на прочных винтах.

Для мощного дрона лучше брать моторы средней производительности со сниженной собственной массой
ёСборка системы управления
Плата с процессором в квадрокоптере для человека должна поддерживать регулировку оборотов пропеллеров, стабилизацию и смену направления. Ставят ее, как и во всех случаях, на центральной площадке, закрепляя винтами в просверленных отверстиях, и соединяют с моторной частью и приемником сигнала.
Аккумуляторов для коптера понадобится сразу несколько, и они должны обладать максимальной мощностью. Батарее придется питать восемь производительных моторов и к тому же поддерживать дрон в воздухе на протяжении хотя бы десять минут. Чтобы конструкция не получилась слишком громоздкой, при сборке проще связать аккумуляторы в съемный ранец, который сможет надеть на спину владелец.

Управление дроном для человека проводится с обычного пульта самим оператором
Посадочные ноги дрону для человека не пригодятся. Но понадобится предусмотреть в конструкции прочный подвес с лямками, который будет отвечать непосредственно за удержание оператора.
Внимание! Построить квадрокоптер для человека довольно дорого. Цена исчисляется десятками тысяч рублей, основные деньги уйдут на покупку моторов и батарей питания.
Заключение
Квадрокоптер своими руками — интересная и увлекательная задача для поклонников радиотехники. При желании в домашних условиях можно изготовить любой дрон, вплоть до моделей, способных поднять над поверхностью земли самого оператора.
Квадрокоптер – современное устройство, активно использующееся в качестве развлечения и для удовлетворения профессиональных потребностей. Вниманию потребителей представлено множество различных моделей. Многие любители электроники предпочитают дроны, собранные самостоятельно.
Сборка стандартного квадрокоптера стоит примерно от 20000 рублей. Если речь идет об устройстве с дополнительными опциями, цена прибора возрастет в несколько раз.
Процесс сборки потребует от конструктора наличия определенных знаний и навыков.

схема квадрокоптера в деталях
Особенности процесса сборки
Для того чтобы собранный в домашних условиях квадрокоптер долгое время радовал владельца, важно обратить внимание на элементы, влияющие на функционал прибора.
Квадрокоптер состоит из нижеперечисленных обязательных элементов:

Стоимость детали варьируется от 1 500 до 15 000 рублей. Выбор напрямую зависит от предназначения устройства. Производители предлагают несколько вариантов: три-, квадро-, гекса-, октокоптерные рамы. При длительной эксплуатации рекомендуется выбирать гексакоптер, гарантирующий стабильную работу устройства при поломке двигателя. Для беспилотников с большой массой следует приобрести октокоптер. Квадрокоптерная рама самая популярная среди вышеперечисленных, что обусловлено доступной стоимостью детали. Именно квадрокоптер мы и рассматриваем в нашем примере.
Двигатель

мотор квадрокоптера лучше выбирать безколлекторный
Цена в разных магазинах достигает 7 500 рублей и напрямую зависит от уровня качества. Число двигателей выбирается в соответствии с типом квадрокоптера: варьируется от 3 до 8 штук. Рекомендуется выбирать безколлекторные двигатели, главными преимуществами которых является длительность эксплуатационного периода, стойкость к внешним фактором.
Давайте посмотрим, как можно собрать дрон из простых материалов, например из бытовых сантехнических труб:

ESC – Electronic Speed Controller или регулятор скорости вращения двигателей. Обязательная деталь стоимостью примерно 3 700 рублей. Число ESC точно совпадает с количеством установленных моторов. Как правило, производители предлагают приобрести сразу комплект деталей.
Полётный контроллер
Деталь отвечает за процесс управление квадрокоптером и во время запуска, и во время полета. Цена устройства может меняться в зависимости от качества и технических особенностей.
Передатчик и приемник
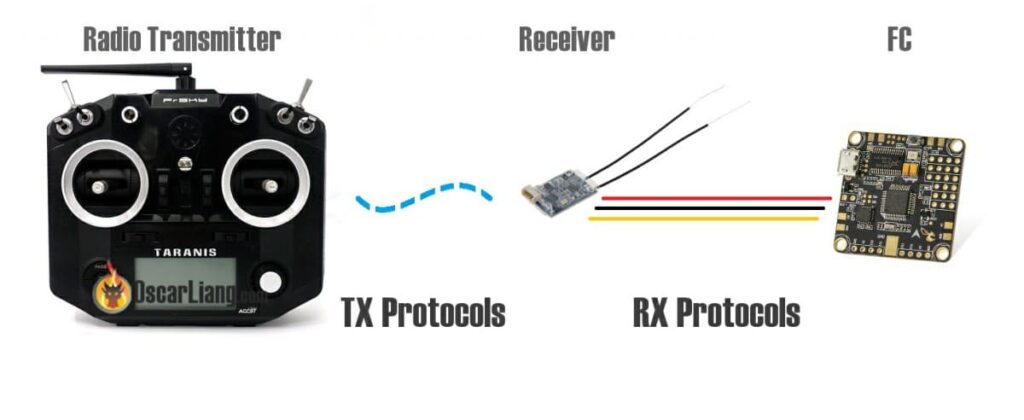
схема радиопередатчик – приемник – полетный контроллер
Деталь необходима обмена оперативной информацией. Особенно важно для большей функциональности и производительности коптера. Стоимость меняется в разные стороны в зависимости от качества детали. Выбор модели передатчика зависит от того, для каких целей будет использовать дрон.
Пропеллеры
Количество пропеллеров зависит от типа беспилотника. Этим следует руководствоваться, выбирая конкретную модель. Важно обратить внимание и на длину лопастей: меньшие отлично подойдут для быстрого набора или снижения скорости, большие же продлят полет дрона и обеспечат стабильность его нахождения в воздухе. Стоимость зависит от материала, из которого изготовлены лопасти. Пропеллер – достаточно хрупкая деталь, рекомендуется приобрести сразу несколько дополнительных.
Защита пропеллера

пропеллеры с зашитой
Важный аксессуар, являющийся гарантом безопасности и долговечности прибора. Установка защиты позволит предотвратить застревание квадрокоптера и снизит вероятность поломки в процессе эксплуатации.
Аккумулятор

Факторы, влияющие на стоимость квадрокоптера
Несмотря на то, что детали устройства делятся на необходимые и дополнительные, общая стоимость квадрокоптера может быть несколько больше, чем ожидалось изначально. Это зависит от установки дополнительного оборудования, которое не только влияет на финансовую составляющую, но и на функционал, и на производительность, и на внешний вид.
Среди таких аксессуаров можно отметить:

Продлит срок службы квадрокоптера, в который вложено большое количество сил и финансов. Стоимость чехлов варьируется в диапазоне от 1 000 до 8 000 рублей, рюкзак обойдется несколько дороже: стартовая цена – 8 500 рублей. Затраты могут увеличиться при покупке дополнительной амортизации. Однако, такие вложения станут гарантом высокого уровня защиты прибора.
Одно из значительных и важных дополнений, делающее пользование беспилотником более увлекательным процессом и позволяющее запечатлеть самые яркие моменты полета. Достаточно дорогой аксессуар, стоимость которого напрямую зависит от качества и технических характеристик.

Устанавливается при работе с камерой: снимки будут более четкими и качественными, поскольку фокус выравнивается по линии горизонта. Стоимость варьируется в диапазоне от 700 до 6 000 рублей: это зависит от тех функций, которыми обладает аксессуар. Главное условие, которому должен отвечать прибор – совместимость с камерой и самим дроном.
Если владелец дрона предпочитает использовать камеру или звукозаписывающее устройство во время полета, фиксируя все живописные места, дополнительная память категорически необходима. Цена карты варьируется в зависимости от доступного на ней пространства: в среднем, хватает 8 ГБ. Цена карт памяти напрямую зависит от ее объема.
Светодиоды придадут устройству оригинальный внешний вид, облегчат процесс наблюдения за дроном, что особенно важно в темное время суток или во время полетов на большой высоте.
Преимущества и недостатки самостоятельной сборки дрона
Главным преимуществом сбора дрона является возможность самостоятельно модернизировать устройство в соответствии с личными предпочтениями и техническими требованиями.
Самостоятельное создание беспилотника – бесценный опыт. Но следует знать и отрицательные моменты до закупки деталей:
- Отсутствие гарантий. При покупке устройства в магазине у владельца есть гарантийный талон, на основании которого можно потребовать заменить оборудование в случае поломки. При самостоятельной сборке такой возможности не будет. Кроме того, нет гарантии, что прибор будет также легко и плавно перемещаться по воздуху, как тот, что был куплен в магазине.
- Финансовые затраты. Несмотря на то, что можно собрать дрон из бюджетных деталей, создание качественного оборудования обойдется достаточно дорого.
- Количество потраченного времени. Процесс сборки гораздо длительнее, чем просто покупка. Кроме того, перспектива его бесперебойной работы туманна.
Сборка квадрокоптера – ответственный процесс, требующий сосредоточенности и внимания. Придется учесть огромное количество нюансов, просчитать стоимость каждого элемента и определиться с причиной конкретного выбора. Необходимые определенные технические знания, без которых создание квадрокоптера практически невозможно. Терпение и разочарования – главные составляющие процесса сборки, которые могут постигнуть конструктора в моменты сборки дрона и его запуска.
Каждому, кто желает стать обладателем исправного дрона и сразу же запустить его в воздух, не тратя время на самостоятельную сборку, рекомендуется отказаться от самостоятельного создания прибора и купить готовое устройство в магазине. К примеру , на нашем сайте представлен рейтинг 12 лучших моделей квадрокоптеров с качественной камерой.
Однако, если же желание собрать квадрокоптер осознанное, следует внимательно изучить рынок и приобрести все необходимые детали, после чего можно сразу приступать к работе.

ВопросыКвадрокоптеры
Для того чтобы собрать квадрокоптер с камерой своими руками, нужно разделить сборку на два этапа. Первый этап это сборка самого квадрокоптера. Второй – подключение к нему камеры.
Итак, первый этап.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;

рама для квадрокоптера с камерой своими руками
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
квадрокоптер с камерой своими руками рама для квадрокоптера с камерой своими руками
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
инструкиция подключения квадрокоптера eng
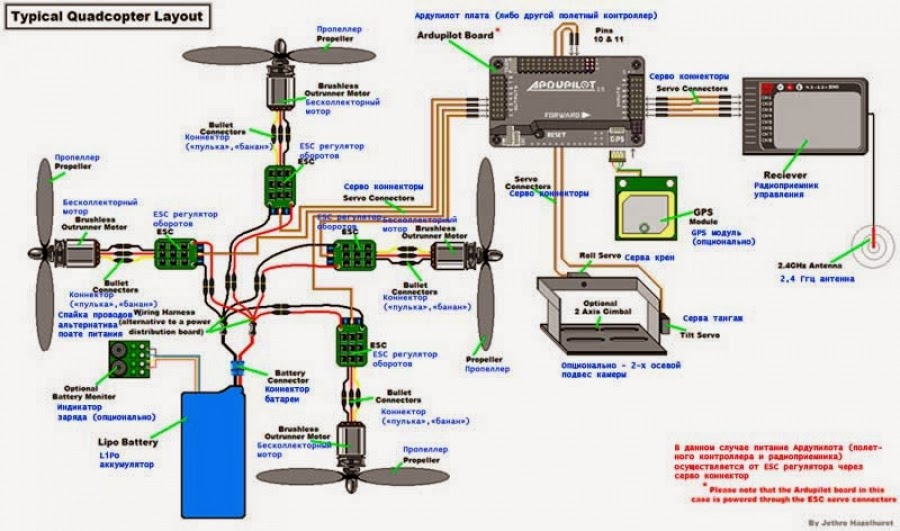
инструкция подключения квадрокоптера rus
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Читайте также: