
Робоплатформа своими руками
Я столкнулся с рядом трудностей при создании автономной программной платформы AIAssistant. Основная из них - это довольно большая база знаний. Это нехорошо и при распространении программы как обычного пользовательского приложения, так и встраиваемого/настольного приложения для управления роботом.
Сейчас мне кажется, что интересным решением может стать создание единой клиент-серверной платформы, централизованно обслуживающей с помощью толстеньких клиентов (программ, работающих на клиентской стороне).
Клиенты должны выполнять следующие функции:
1. Обеспечивать связь - свою и сервера с оборудованием с помощью программных подключаемых драйверов.
2. Обеспечивать ресурсоемкие первичные вычисления. К таким вычислениям я отношу в первую очередь обработку изображений до требуемой степени абстракции, с которыми работает сервер.
3. Обеспечивать быструю примитивную автономную реакцию системы (рефлексы), т.к. роботы работают в реальном времени и критическим является время реакции. Возможно, что такая автономность не потребуется.
4. Обеспечивать свою связь с удаленным сервером.
5.
Сервер должен выполнять следующие функции:
1. Служить единым хранилищем опыта роботов.
2. Выполнять все главные информационные функции жизнедеятельности робота.
3.
Вот такая приблизительно мысль. М.б. кому-то она интересна? Хотелось бы с кем-нибудь тнад такой платформой поработать совместно. Условия можно обсудить. Но сейчас в первую очередь нужно саму идею распределенного роботостроения обсудить.
Пока это сферический конь в вакууме. Надо накопить багаж реальных применений в реальных задачах, где этот самый AI будет генерить добавленную стоимость, и только опираясь на этот багаж можно будет двигаться дальше.
Не знаю о каком сферическом коне в вакууме вы говорите, а я говорю о том, чтобы сделать возможность легкого подключения простых ботов к универсальным "мозгам". Это будет полезно и начинающим и продвинутым роботостроителям. А по соотношению цена/результативность или по другим соотношениям, например, по стоимостям владения такая система должна оказаться дешевле. Это как центральное отопление или водопровод или электричество. Воткнул в розетку электроприбор. И все, он заработал. А если каждый раз изобретать электростанцию и для каждого утюга ее запускать в работу, то это и есть неэффективность. Конечно, богатенькие могут у себя в коттедже и атомную электростанцию поставить. Но даже им это не всегда полезно.
Особенность робомозгов видимо в том, что интенсивные расчеты нужны в моменты пиковой нагрузки. Зачем тогда делать автономную систему в расчете на эту пиковость?
Виктор Казаринов писал(а): Особенность робомозгов видимо в том, что интенсивные расчеты нужны в моменты пиковой нагрузки. Зачем тогда делать автономную систему в расчете на эту пиковость?
О каких ешё, тем более интенсивных расчётах идёт речь?? Вы всё время говорите в русле своих фантазий на тему онтологии, каких то абстракций из видео. А результата ноль и поверьте и через десять лет ситуация не улучшиться. Зачем вообще тратить время на онтологию? Кому сейчас нужна база данных с кучей зависимостей?? Нужны конкретные решения, вполне конкретных задач. А не философия на тему, всё состоит из знаний, давайте думать как их лучше хранить, описывать, и проводить между ними взаимосвязи. Этот путь ведёт к деградации.
Если не двигаться в сторону понимания роботом окружающего мира, его вписывания в этот мир и к адекватности этому миру, то конечно, мозги роботу не нужны.
Извините за резкость, но в основном роботостроители делают протезы. Робот, кот. является продолжением конечностей и глаз оператора, навряд ли будет в скором времени сильно востребаован. Автономное поведение роботов - эта весьма неплохая цель. Я нисколько не умаляю ваших достижений. Но и моя точка зрения имеет право на жизнь.
Проблема в том, что предствление и пользование знаниями - очень трудная тема. Я выступаю с позиций единого представления мира в мозгу робота. Кто-то за разрозненную информацию. Я не против этого. Флаг в руки и барабан на шею.
Я вообще-то особо не филосовствую. Просто моя работа сейчас не особо видна, т.к. ее продукт - информация. А в Совке информацию и инженеров не любили. Танк или пушку сделать. Это -да, видно всем, результат оглушительный. А информация - это продажная девка империализма (перефразирую).
Ну так я и говорю, что до ваших идей ещё пахать и пахать. Чтобы хранить и классифицировать данные. В первую очередь видео изображения, потом звук и т.д., нужно для начала создать инструменты которые и будут это делать. Типа OpenCV, но на порядок легче для обычного обывателя. В интеловской библиотеке наверняка есть почти всё необходимое. Но ведь из этого нужно собрать что то стоящее. И я считаю первым пунктом и нужно сделать именно это. А уже потом думать как хранить и связывать друг с другом. Т.е. должно быть не "в первую очередь обработку изображений до требуемой степени абстракции", а должна быть озвучена эта самая требуемая степень. И это сложная задача, на которую и нужно бросать все силы, а не пытаться делить шкуру не убитого медведя.
Тут шкуры еще нет и делить особо нечего. Я же не предлагаю сразу реализовать всю высшую "нервную" деятельность роботов. Но кое - что уже весьма пригодится и самым простейшим роботам даже с уже имеющимися средствами.
Универсальные мозги должны создавать какую-то добавленную стоимость, которой раньше не было - какую добавленную стоимость при решении каких конкретных задач они сейчас создают?
Допустим, что примерный бюргер покупает в магазине робокосилку или робопылесос. Подозреваю, что сейчас в них собираются монтировать техническое зрение и другие прелести обычных роботов включая неслабый бортовой компьютер. Если же обойтись лишь первичной обработкой информации, например, компрессией видео и трансляцией высокоуровневых команд от сервера в простые драйверные команды приводам, то при больших тиражах себестоимость таких домашних роботов будет бросовая. С буржуями - производителями такого харда можно будет пообсуждать возможность изготовления таких облегченных роботов. А покупатели за небольшую плату смогут пользоваться сервисом - оживлением роботов.
Такой подход - аналогия между простыми компами с подключением к интернету и нетбуками. Только в случае с роботами разница в цене владения может быть существенно больше.

Основная идея конструктора — создание образовательной платформы, которая позволяла бы с минимальными затратами на подготовку робота сосредоточиться на развитии алгоритмических навыков и программировании.
На фото ранний прототип Робоплатформы. Корпус вырезан из фанеры, печатная плата создана по технологии ЛУТ, крепления из Полиморфуса. На это модели отрабатывалась идея магнитных креплений датчиков.

Магнитные крепления датчиков — одна из главных фишек современного конструктора ScratchDuino. Каждый датчик находится в пластиковой оболочке и надежно прикрепляется к моторизованной платформе с помощью магнитов. Это позволяет сделать процесс сборки быстрым.
На следующем фото прототип шилда Arduino с разъемом для Робоплатформы и Лаборатории и одна из тестовых реализаций Лаборатории:

Прототип шилда Arduino и одна из тестовых реализаций Лаборатории
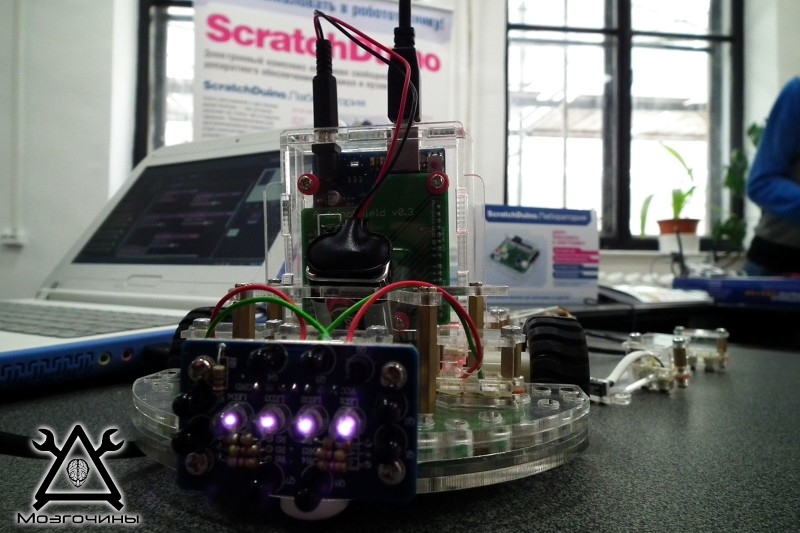
Картридж с Arduino и Робоплатформа ScratchDuino в Lego-броне:

Разъемы Робоплатформы — для картриджа и для будущих расширений (питание, RX/TX/SPI и цифро-аналоговые выходы Arduino):

Вот для чего нужны отверстия на Робоплатформе Скретчдуино. Тест Lego-совместимости предсерийного прототипа с акриловым корпусом:


Чертеж сборки Робоплатформы Скретчдуино
- ScratchDuino.Лаборатория— плата расширения с датчиками ввода-вывода.
- ScratchDuino.Роботоплатформа— двухколесная робототизированная платформа.
Презентация платформы ScratchDuino:
Фото Александр Казанцев. Фотографии публикуются с разрешения автора.
Это открытый проект и изготавливается по принципу фаблабов, т.е. не только программный код, но и 3D-модели, файлы для производства плат и всех деталей — открыты.
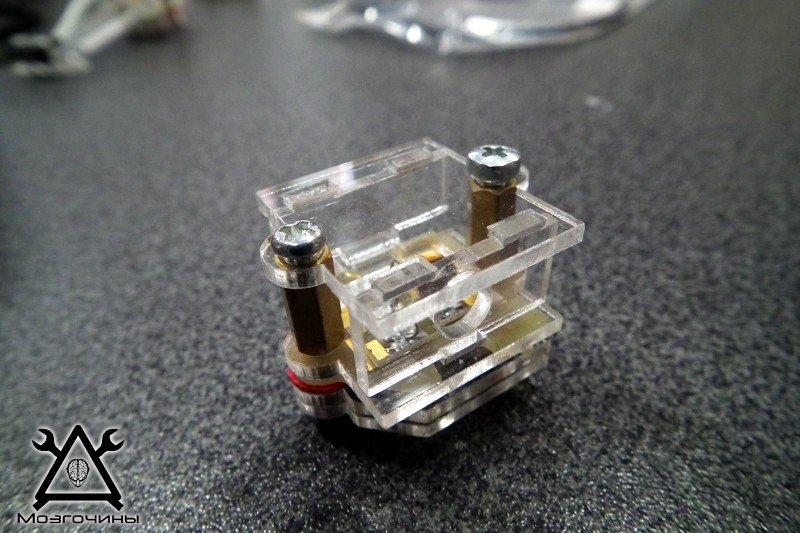
Вот такой датчик крепится на платформу с помощью 3-х неодимовых магнитов, которые в свою очередь являются контактами.
Проект нацелен на обучение детей. Скорость сборки позволяет собрать робота и сделать простую программу для его управления за один школьный урок и это отличается его от известного (и более дорогого Lego mindstorm). А продвинутые пользователи могут написать программу на Си, т.к. упрааляется робот через другой известный всем hardware-хакерам микроконтроллер Arduino.

Подключается к известной во всём мире программе для обучения детей программированию Scratch.

На открытии Фаблаб мне представилась возможность познакомиться с ней поближе и поуправлять через USB.
С техническими подробностями функционирования системы можно ознакомиться на сайте автора. Кроме того, на его YouTube-канале опубликовано еще несколько подобных демонстрационных роликов.
Ранее в этом блоге
Как Алису кофе варить научили
DOOM, OMDO и запасная пара глаз
Проклятые грызуны!
Стихи из песка
Knight Industries 2000
Винтажный переносной 3D-принтер для хипстеров и любителей антиквариата
Гексапод, 3D-печать и военная техника с ароматом стимпанка
Нашли опечатку? Выделите фрагмент и нажмите Ctrl+Enter.
Набор свойств отдельной галактики позволил ограничить среднюю плотность материи во Вселенной
Археологи нашли в позднескифских погребениях бляхи в зверином стиле
Один китайский спутник отбуксировал другой на орбиту захоронения
Четыре сигнала Хунга-Тонга-Хунга-Хаапай
Как из Москвы выглядел взрыв вулкана в Тихом океане
Эволюционный успех ян-рукокрылых объяснили открытым каналом Розенталя
Появление Оленеостровского могильника связали с самым суровым голоценовым похолоданием
Транспортник со встроенной в обшивку антенной поднялся в небо
Пара аттосекундных импульсов запутала молекулярный катион и фотоэлектрон
Один китайский спутник отбуксировал другой на орбиту захоронения
Moderna и Pfizer запустили клинические испытания вакцин против омикрона
Археологи нашли в позднескифских погребениях бляхи в зверином стиле
Феноменология духа
Пара аттосекундных импульсов запутала молекулярный катион и фотоэлектрон
Физики создали радиевые оптические часы
Полупроводниковые кубиты вступили в квантовую гонку
Квантовое распределение ключей преодолело 830 километров оптического волокна
Немарковский теплообмен с резервуаром объяснил эффект Мпембы
Теория и эксперимент сошлись в описании зарядового радиуса изотопов никеля
Физики создали оптическую квантовую батарею на сверхпоглощении
Радиус протона измерили по переходу 2S−8D атома водорода
Солнечный свет сдвинул равновесие реакции в сторону продуктов
Самое сложное
© 2022 N + 1 Интернет-издание Свидетельство о регистрации СМИ Эл № ФС77-67614
Читайте также: