
Геоскан пионер мини подключение к телефону
В ручном режиме, управление квадрокоптером осуществляется с помощью мобильного приложения для смартфонов «Geoscan Jump». Перед началом работы загрузите актуальную версию с сайта компании “Геоскан” или из Google Play.
Ссылка на скачивание с сайта
Обратите внимание, что мобильное приложение поддерживает устройства только с операционной системой Android версии выше 6.0.
Для осуществления полёта необходимо произвести привязку смартфона к квадрокоптеру.

- Включить квадрокоптер, нажав на кнопку включения сбоку, сзади должна появиться цветовая светодиодная индикация.
- Подключится к Wifi точке квадрокоптера в меню настроек WiFi сетей на телефоне (WiFi-точка: Pioneermini; пароль: 12345678).
- Запустить установленное на смартфоне приложение Geoscan Jump.
- Следуйте инструкциям в приложении.
Ознакомьтесь с остальной частью инструкции, прежде чем начинать полет.
Бета-версия приложения¶
Мы постоянно совершенствуем наш продукт и поэтому приглашаем присоединиться к нашему открытому бета тесту.

Чтобы напомнить себе как обновлять ПО можете снова посмотреть раздел «Настройка»
Участие в тестировании добровольное. Имейте в виду, так как это бета версия при использовании могут встречаться баги (неисправности). О них вы можете сообщать через форму обратной связи нажав на значок жучка в приложении Jump. Удачных полетов!
Новый интерфейс, обратите внимание на версию приложения.

История бета тестов¶
Тестирование от 19.03.21
- Мобильное приложение Geoscan Jump;
- Новая прошивка Автопилота Пионера Мини;
- Обновленная версия библиотеки pioneer_sdk;
Мы надеемся, что тестирование не займет много времени, и мы сможем «отловить» много багов и надеемся, что вы в этом очень поможете перед выходом официального обновления.

В статье рассмотрим электронную часть нового квадрокоптера Геоскан Пионер, который предназначен для обучения робототехнике. Мы расскажем о создании коптера, а точнее о том, какой опыт мы получили и какие изменения внесли в проект. В завершении — поделимся планами на будущее.
1. Зачем в Геоскан создают квадрокоптер для обучения
Для решения множества прикладных задач все чаще применяются беспилотные летающие аппараты (БПЛА), в частности, мультироторные системы. Их присутствие можно увидеть во многих сферах, например, в аэрофотосъемке, доставке грузов, видеосъемке с воздуха, мониторинге объектов, а также в гонках (дрон-рэйсинге).
Вместе с тем, в активно развивающейся индустрии беспилотной авиации наблюдается нехватка профессиональных кадров. Технические кадры лучше всего готовить, начиная со школьной скамьи. Только прошедший все этапы: от проектирования до эксплуатации и модернизации – может стать настоящим профессионалом своего дела и дать очередной виток в развитии отрасли, как в технологическом плане, так и в плане вовлечения в индустрию все большего числа смежных направлений и решения все большего количества прикладных задач.
Можно утверждать, что использование квадрокоптера школьниками, студентами и любителями как летающего робота для изучения основ разработки, эксплуатации и модернизации БЛА – является интересной для нас темой. В последствие, это может привести к созданию базы нового образовательного стандарта.
Мы полагаем, что следующие темы являются наиболее интересными для изучения:
Программирование систем управления, создание алгоритмов ориентации и навигации в пространстве, распознавание окружения;
Электроника — подключение датчиков и изучение принципов их работы, изучение устройства летательных систем;
Конструирование рамы и механики, а также изучение электро-механических параметров коптера для оптимизации режимов полета при решении разных задач;
Управление коптером как в режиме пилота, так и в режиме оператора БПЛА. То есть вручную или автоматически.
Таким образом, формируется множество интересных задач, которые можно предоставить решать подрастающему поколению в рамках образовательных кружков, конкурсов и олимпиад.
Опираясь на вышесказанное и уже на имеющийся опыт создания БПЛА в компании Геоскан, мы решили воплотить данные идеи в жизнь, путем создания программно-электронной платформы.
Стоит отметить, что для того, чтобы просто программировать летающего робота нужна система навигации. И если на улице эта проблема решается применением спутниковой навигации, то в помещении эта задача не имеет однозначного решения. Учитывая, что далеко не всегда имеется возможность работы на улице из-за погоды, окружающей местности или безопасности, навигация в помещении становится просто необходима. Какую систему навигации мы выбрали будет рассказано ниже.
2. Первая версия электроники «школьного» коптера
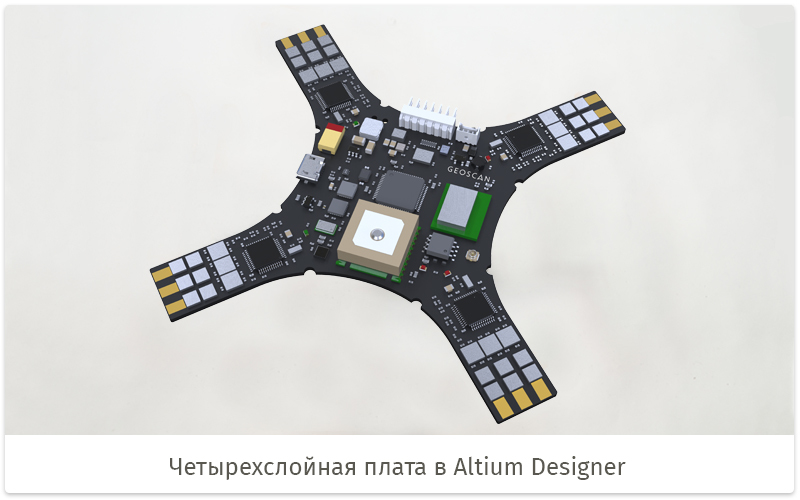
Чтобы создать небольшой коптер, необходимо свести массу и размеры электроники до минимума. Для этого логично применить одноплатное решение, содержащее автопилот (АП) с датчиками, регуляторы моторов, радиосвязь, источники питания и необходимые разъемы. «Одноплатность» упрощает совмещение электроники с рамой и уменьшает количество проводов до минимума.
Бесколлекторные моторы используются в силу ряда преимуществ по сравнению с коллекторными. Такие моторы эффективней и надежней, а большой крутящий момент относительно небольшого веса, позволяет отказаться от применения редуктора на винт. Определенной сложностью является разработка регуляторов скорости бесколлекторных моторов. Но благодаря имеющемуся опыту в области разработки «взрослых» БПЛА, это не стало большой проблемой. Из минусов выбранной винто-моторной группы можно отметить только стоимость моторов и регуляторов, но она оправдываются временем полета, хорошими скоростными характеристиками коптера, возможностью перемещать бОльшую полезную нагрузку, а также меньше придется возиться с покупкой и заменой вышедших из строя моторов.
Таким образом мы подошли к созданию платы-прототипа для маленького коптера. Мы не будем уделять этой плате много внимания, а лишь отметим ее основные недостатки, которых не мало, в первую очередь из-за очень скромных сроков разработки в три недели.
При начальном проектировании хотелось попробовать максимальный функционал коптера, поэтому на плате были размещены магнитометр и модуль спутниковой навигации, которые оказались не работоспособны из-за недостаточно хорошей электромагнитной совместимости с платой. Магнитометр был слишком близко расположен к силовым проводникам и при прохождении тока через проводник, магнитометр выдавал некорректную информацию. Из-за недостаточной площади экрана керамической антенны, GPS приемник находил недостаточное для навигации количество спутников.
Для простоты подключения квадрокоптера к компьютеру был использован Wi-Fi модем. Использовать данный интерфейс для телеметрии и управления проблематично, если предполагается работа в зашумленной среде, например, на выставках или других массовых мероприятиях, где очень много устройств на 2.4 ГГц. В добавок модуль показал нестабильную работу в сети.

С точки зрения эксплуатации, всё также получилось не совсем гладко. Во-первых, фазные провода моторов приходилось паять на плату, так как для них не было предусмотрено разъемов. Трудность заключается в необходимости иметь навыки работы с паяльником и возможности перепутать порядок проводов, что приводит к неверному направлению вращения мотора, а также усложняет сборку-разборку. Во-вторых, не получилось сделать удобных крепежных отверстий на плате, что плохо сказывалось на надежности и практичности крепления платы к раме. В-третьих, интерфейсный разъем в виде стандартных «штырьков» с шагом 2мм не всегда удобно использовать при подключении нескольких устройств.
Помимо прочего, размеры платы оказались больше ожидаемых из-за одностороннего монтажа элементов (за исключением небольшого числа элементов регуляторов на нижней стороне).

Тем не менее коптер получился рабочим. Прошивки автопилота и регуляторов были перенесены с нашего «большого» коптера . Немного настроив коэффициенты контуров управления, мы заставили коптер отлично справляться с его основной задачей — летать. С моторами 1306 3100 kV, винтами 5" и аккумулятором LiPo 2s 1300 mAh коптер летает 15-16 минут, а с GoPro3 (80 г) — около 10 минут.
Был реализован полет в ультразвуковой (УЗ) системе навигации от Marvelmind. Система состоит из двух типов УЗ-маячков: стационарного и подвижного. При этом, закрепленный на коптере подвижный маячок системы выдает 3 координаты положения на автопилот с достаточно низкой точностью (± 5-10 см) и созданная нами система управления комплексирует эти данные с данными гироскопа и акселерометра, контролирует пространственное положение коптера.
3. Идеи при создании новой версии
При подходе к новой версии платы нам стало очевидно, что необходимо внести ряд доработок. Мы продумали концепцию проекта более детально, так как появилось полное видение областей и способов применения коптера. Главной идеей стало решение оставить на плате только необходимые компоненты и сделать своего рода «материнскую» плату, к которой будут подключаться модули, задающие функциональное назначение коптеру. Примером такого модуля может служить спутниковый приемник с компасом для навигации на улице.
Теперь новая плата содержит главный контроллер АП с датчиками — акселерометром, гироскопом и барометром. Барометр нужен для режима удержания высоты, который значительно упрощает контроль над коптером при ручном управлении. Чтобы хранить логи полетов и параметры автопилота мы используем отдельную микросхему флэш-памяти.

Связь с ПК осуществляется через радиоканал или USB. Чтобы сократить время разработки, мы использовали готовый радиомодуль фирмы Radiocraft на 868 МГц с мощностью в 25 мВт.
Радиомодуль обеспечен чип-антенной на плате, а также разъемом для подключения внешней антенны. Правда, чтобы использовать разъем внешней антенны, придется поработать паяльником. Предполагается, что обычному пользователю будет достаточно чип-антенны. Чтобы подключить ПК к коптеру по радио нужно использовать ответный USB модем, поставляемый в комплекте.

В роли индикаторов различных событий выступают управляемые RGB светодиоды WS2812B. Есть возможность подключить дополнительные светодиоды, кроме тех, которые находятся на плате.

Регуляторы скорости моторов способны выдерживать ток в 20 А и обладают возможностью активного торможения, что положительно сказывается на динамике управления коптером.
Напряжение питания лежит в пределах 2s-3s LiPo аккумуляторов. К АП регуляторы подключаются по UART, а не через ШИМ сигнал. Это хорошо сказывается на устойчивости к помехам. Размер регуляторов уменьшен, сравнительно с первой версией, за счет более компактных корпусов электронных компонентов. Вдобавок мы сделали двухсторонний монтаж компонентов, который также позволил уменьшить размер платы.

Теперь на плате появились «человеческие» крепежные отверстия для удобного монтажа к раме.
Полезных разъемов стало больше. Сейчас не нужно паять провода моторов к плате. Модули расширения подключаются посредством двух разъемов сверху платы, при этом нельзя перепутать положение модуля за счет разного количества пинов и конструкции самого разъема. Разъемы TE Micro-MaTch выбраны с учетом защиты от механических повреждений. В отличие от штырьков 2.54 мм, их не так легко повредить при падениях или небрежном обращении. Также можно подключать модули через шлейф-удлинитель для возможности выноса модуля, например, вниз коптера. На эти разъемы выведены следующие интерфейсы: UART, SPI, I2C, несколько GPIO, сигнал для подключения дополнительных управляемых светодиодов и питание 3.3 В и 5 В. Логический уровень интерфейсов по-умолчанию 3.3 В, но при желании может быть изменен на 5 В.
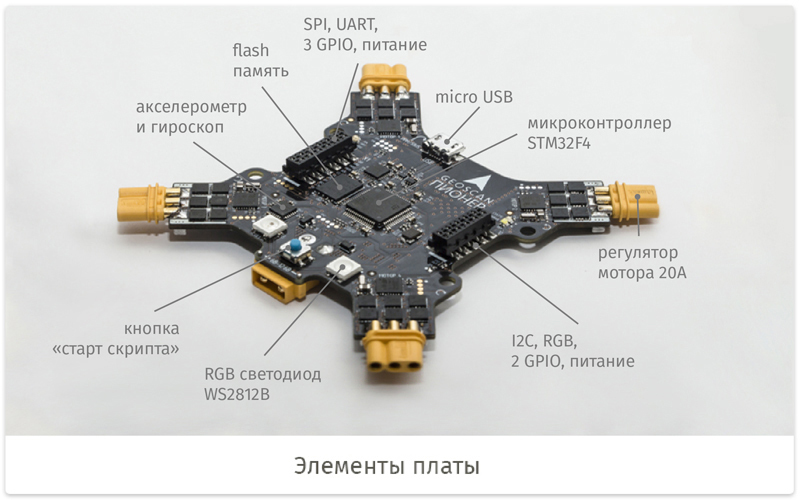
Кнопка программируется пользователем или используется по-умолчанию для запуска скрипта.
Немного о программной составляющей платформы. Прошивка микроконтроллера автопилота STM32F4 написана на C++ и работает под управлением RTOS NuttX. Прошивка закрыта, но пользователь может написать свой код на скриптовом языке Lua.
Вообще мы выбирали из нескольких скриптовых языков: Python, JavaScript (IoT.js) и Lua. Стандартную реализацию Python сложно использовать под МК, из-за слишком большого размера. Мы рассмотрели вариант с MicroPython, но он не устроил из-за возможности прямого доступа к ассемблерным инструкциям. А доступ к ним мы не хотели бы предоставлять рядовому пользователю. У JavaScript избыточная функциональность и, чтобы убрать лишнее, пришлось бы поработать. Lua — очень популярный язык, легко расширяемый с помощью C++, имеет подходящие для нас реализации.
Скрипт может содержать алгоритмы управления или просто последовательность действий, получение и обработку данных с датчиков, управление полезной нагрузкой и т. д. В целом предоставляется широкий функционал взаимодействия с летающим роботом, который может использоваться для исследовательских, конкурсных или любительских задач. Скрипт может быть написан и залит в коптер с помощью специального приложения, но также можно генерировать код с помощью Google Blockly.
Закачать скрипт можно через USB провод или радио канал. Приложение на ПК отображает информацию телеметрии, что позволяет судить о состоянии коптера. И, конечно, имеются элементы управления и настройки робота.
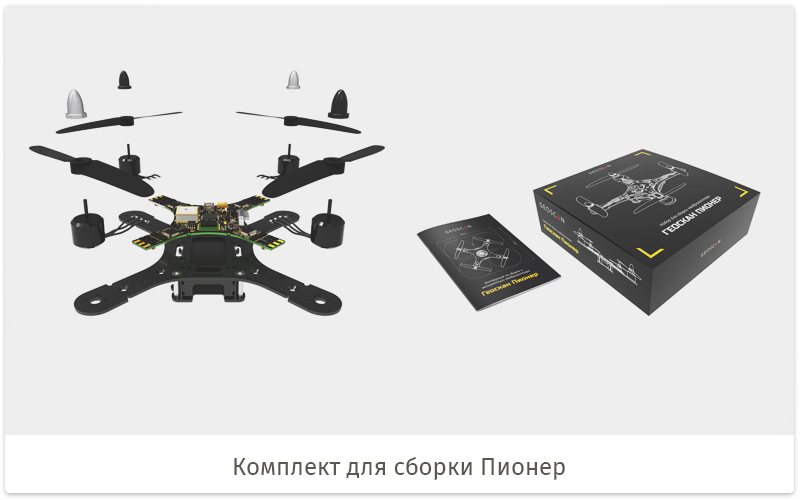
Рама, на данный момент, изготавливается из карбона или стеклотекстолита путем фрезеровки пластин. Она собирается из небольшого количества частей и имеет отсек для батареи.
Опционально можно поставить шасси и защиту винтов. Сейчас в разработке рама из пластика, которая будет изготавливаться с помощью литьевой технологии.

4. Расширяем функционал модулями
Как было сказано выше, плата обладает возможностью расширения с помощью подключаемых модулей. Основными являются следующие модули:
Модуль Навигации — приемник для собственной системы позиционирования внутри помещения по ультразвуку.

Модуль GPS — позиционирование на улице по спутникам. Также имеет на борту магнитометр для ориентации по курсу.

Модуль ToF — получает информацию с нескольких ToF датчиков расстояния, направленных в разные стороны, что позволяет детектировать препятствия.

Модуль Груза — оснащен электромагнитным захватом груза и светодиодами для индикации и световых эффектов.

Модуль Marvelmind — переходник для системы позиционирования от Marvelmind.

Модуль OpenMV — переходник для камеры для компьютерного зрения OpenMV.
Модуль Сонар — обеспечивает возможность получения высоты при помощи ультразвукового датчика.
Модуль WiFi — добавляет WiFi интерфейс.
Модуль Bluetooth — добавляет Bluetooth интерфейс.
Возможны, конечно, и многие другие модули, которые мы планируем создавать в будущем.
5. Применение на практике и планы на будущее
Промо видео Геоскан Пионер
Мы осуществили несколько поставок Пионера в различные образовательные учреждения. Они были сделаны на базе первой версии платы, поэтому поставки носили скорее экспериментальный характер. Но тем не менее, коптер вполне подошел как сборочный конструктор и для обучения навыкам пилотирования.
Были проведены соревнования на пилотирование с участием Пионеров в Алферьево во время конференции Аэронет 2016.
Как летающий робот Пионер привлек к себе внимание на фестивале робототехники Робофинисте. Там проходит испытание с полетом по восьмерке, с которым, собственно, коптер успешно справился. Система работала на базе навигации по УЗ.

Была сделана площадка с безопасным пространством в виде каркаса с сеткой, где у всех посетителей фестиваля была возможность поуправлять коптером. При этом система управления не давала вывести коптер за пределы разрешенной зоны.
На сегодняшний день мы работаем над производством первых партий Пионеров, разрабатываем новые модули расширения, проектируем пластиковую раму под литьё и завершаем создание своей системы навигации по ультразвуку. А еще планируется презентация нашего Пионера. О месте и времени проведения можно будет узнать на сайте Геоскан.

Пионер Мини – это базовый учебно-методический комплекс для первого знакомства с автономными летательными аппаратами. Подойдет для школ, авиамодельных секций, кружков робототехники и самостоятельного изучения.
Пионер Мини разработан в рамках концепции STEM-образования, позволяя ученикам развиваться сразу в нескольких предметных областях – программировании, физике, математике.
Квадрокоптер может летать в помещении полностью автономно по написанной учениками программе, открывая широкие возможности для проведения учебных занятий и соревнований по робототехнике.
- Получить базовые навыки пилотирования;
- Ознакомиться с устройством и принципом работы квадрокоптера;
- Изучить на реальном примере физику полёта;
- Научиться программировать электронные устройства;
- Освоить новое интересное хобби.
Управление
В ручном режиме управление квадрокоптером осуществляется с помощью мобильного приложения Geoscan Jump для смартфонов. Перед началом работы необходимо загрузить актуальную версию с сайта компании «Геоскан» или с Google Play Store.
Установленные системы
По умолчанию, на квадрокоптере «Пионер мини» установлены следующие системы:
Система оптического потока. Система позволяет позиционировать квадрокоптер используя оптический датчик, отслеживая смещение объектов. Дает возможность удерживать положение и летать в автоматическом режиме без системы навигации в необорудованном помещении.
Фото/видеокамера. Начального уровня с возможностью передачи видео по Wi-Fi.
Инфракрасная система и ультразвуковая система навигации в помещении. Система позволяет работать в локальной системе координат. Принимает и обрабатывает сигналы инфракрасных/ультразвуковых маяков, самостоятельно определяет положение, скорость и направления движения коптера.
ESP-32. Система на кристалле, позволяет решать задачи, не связанные с логикой полета. Открывает широкие возможности по программированию.
Разъем. Разъем для подключения сменных модулей.
Лазерный дальномер. Дополнительно позволяет ориентироваться в пространстве.
Барометр. Позволяет определить высоту полёта квадрокоптера.
Датчик тока и напряжения. Следит за состоянием аккумуляторной батареи.
Инерциальный блок. Состоит из 3-х осевого гироскопа и 3-х осевого датчика ускорений.
Фильтр
Магазин
Метки
Производитель
Последний заказ

Радиоуправляемая багги HSP XSTR TOP 4WD Li-Po 1:10
Учебный квадрокоптер Геоскан Пионер Мини



Многофункциональный учебно-методический комплекс для школ, авиамодельных секций, кружков робототехники и самостоятельного изучения. Пионер Мини - это базовый учебно-методический комплекс для первого знакомства с автономными летательными аппаратами.
Пионер Мини - квадрокоптер начального уровня. Он предназначен для комплексного обучения в рамках проведения уроков технологий или занятий по робототехнике в помещениях (Школах, ЦМИТов, Фаблабов, кружков, секций).
Пионер Мини разработан в рамках концепции STEM-образования, позволяя ученикам развиваться сразу в нескольких предметных областях – программировании, физике, математике.
Квадрокоптер может летать в помещении полностью автономно по написанной учениками программе, открывая широкие возможности для проведения учебных занятий и соревнований по робототехнике.
С его помощью можно:
Получить базовые навыки пилотирования;
Ознакомиться с устройством и принципом работы квадрокоптера;
Изучить на реальном примере физику полёта;
Научиться программировать электронные устройства;
Освоить новое интересное хобби.
Преимущества:
Полностью автономный полет по программе;
Учебно-методическое пособие для учителей и учеников;
Возможность управления с мобильных устройств;
Возможность установки дополнительных модулей;
Небольшой вес и размер, простая сборка;
Поворотная фото/видео камера;
Поддержка ультразвуковой (УЗ) и инфракрасной (ИК) систем навигации в помещении;
Широкие возможности для программирования благодаря ESP-32;
Возможность зарядки аккумулятора через micro-USB, не вынимая из коптера.
На борту Пионер Мини:
Камера с разрешением 2Мп;
Система на кристалле ESP-32;
Модуль SD-карты;
Барометр;
Дальномер;
Датчик оптического потока;
Системы навигации в помещении;
Прочный корпус из пластика;
Защита пропеллеров.
Основные характеристики:
Длительность полета: до 10 минут
Камера - 2 Мп
Разрешение видео: до 1200х1600
Масса квадрокоптера: 100 г.
Двигатель: коллекторные / 4 двигателя
Дальность полета: до 50 м
Скорость полета: до 15 км/ч
Диаметр пропеллеров: 65 мм
Размеры коптера: 134х164х38 мм
Аккумулятор: LiPo 1S
А можно ли вообще подключить телефон к магнитоле? Этим вопросом очень часто задаются начинающие водители при выборе автомобильной магнитолы .
Большинство современных автомобильных магнитол имеют функцию подключения к внешнему носителю через Блютуз, AUX и USB. Именно о данных способах подключения речь и зайдет в нашей сегодняшней статье.
Как подключить aux магнитолы к телефону
Еще один способ соединения телефона с магнитолой осуществляется через разъем AUX. Данный способ подключения к внешнему устройству существует очень давно – со времен кассетных магнитол. Это самый первый способ подключения головного устройства к внешнему носителю.

Подключение смартфона к автомагнитоле через AUX выход очень простое. Нужен просто кабель с двумя Jack (3.5мм) с обеих его сторон, один из которых подключается к указанному выходу на магнитоле, второй – вставляется в разъем для наушников смартфона. Все, теперь можно выставить на смартфоне желаемую музыкальную композицию и наслаждаться.
Обязательными условиями успешности такого типа подключения является наличие кабеля (его легко купить и стоит он копейки), выхода AUX на магнитоле (они есть практически во всех магнитолах, даже не в самых современных) и, самое главное, наличие соответствующего разъема для наушников на смартфоне.

Тут ситуация бывает сложней, так как некоторые производители вообще «забывают» о таком полезным выходе, а другие используют некие специализированные выходы, которые могут использоваться только в комплекте с фирменными наушниками. Если выхода на наушники нет, то тут уже ничего не поделаешь, а вот если он не стандартный, то проблему можно решить специальным штекером.
Как подключить телефон к магнитоле – вопросы читателей
А сейчас хотелось бы ответить на самые популярные вопросы наших читателей о подключении автомобильной магнитолы к телефону!
Как подключить телефон к магнитоле pioneer
Для того, чтобы подключить свой телефон к магнитоле Pioneer, Америку открывать не стоит! Воспользуйтесь тремя выше описанными методами, и все у вас получиться!
Как подключить телефон к магнитоле через bluetooth
Подключение автомобильной магнитолы к телефону посредством Bluetooth-соединения можно организовать в том случае, если в телефоне и магнитоле есть соответствующие функции. Проверить есть ли в автомагнитоле такая функция, можно в меню.
Больше про Хуавей: Как подключить смартфон к машине -
Также необходимо проверить, чтобы оба устройства имели одинаковые протоколы связи по Bluetooth (в том числе, А2DP). В современных магнитолах такой протокол обычно поддерживается, Смартфоны прежних лет выпуска могут не поддерживать потоковое воспроизведение.
Связь магнитолы с телефоном посредством блютуз можно организовать, как со стороны телефона, так и со стороны автомагнитолы. При этом оба устройства должны активировать Bluetooth. Затем необходимо на одном из устройств осуществить поиск всех устройств Bluetooth в радиусе действия связи. Далее выбрать соответствующее устройство, дать запрос на соединение, обменяться кодом.
Преимущества Bluetooth-соединения: не требуется кабель, беспроводная связь.
Недостатки: сложность настройки подключения, возможность помех.
Как подключить телефон к магнитоле через usb кабель
Самый распространенный способ подключения телефона к магнитоле – это использование USB-разъема. Ни одна современная магнитола уже не выпускается без стандартного USB-выхода на панели. Такой выход позволяет использовать в качестве носителя музыки обычную компьютерную флеш-карту. Но к нему можно запросто и подключить мобильный телефон через шнур подключения к компьютеру

Такой шнур на одном конце имеет стандартный USB-штекер, а с другой – выход для подключения к смартфону. Простые магнитолы не способны интегрироваться с телефоном, и в таком случае последний выступает только как носитель информации, то есть в качестве обычной флешки.
Для воспроизведения музыки достаточно подключить шнур к смартфону и к выходу магнитолы, а после в настройках телефона в пункте «USB-подключение» выбрать «Передача данных», после чего магнитола сможет считывать все музыкальные файлы. При этом управление музыкальными файлами будет осуществляться только с магнитолы.

Подключение через USB-шнур – вполне удобное, оно позволяет управлять файлами непосредственно с магнитолы, к тому же многие смартфоны при таком соединении подзаряжаются, хоть и не так быстро, как от обычного зарядного устройства. И все же получается двойная выгода – и музыка звучит, и телефон хотя бы не разряжается от этого.
Как подключить телефон к штатной магнитоле на ладе приора ?
Штатная магнитола Лады Приора к сожалению не оборудована функцией Bluetooth-соединения! Поэтому подключится к смартфону через него не получится, но воспользоваться двумя выше описанными методами через USB и AUX у вас получиться!

Как сделать в автомагнитоле pioneer линейный вход
Иногда, после приобретения автомагнитолы у владельца машины стоит вопрос: как подключить автомагнитолу пионер к линейному входу. Это дополнительная функция, которая позволяет к магнитоле подключать приборы и устройства от внешних источников звука. Сделать линейный вход своими руками достаточно легко. Для работы понадобятся:
Инструкция проведения операций:
- В штатной автомагнитоле пионер, скорее всего, уже встроен вход AUX — внешний источник звука. Для его подключения нужно найти распайку подключения.
Отыскать и отключить три контакта, расположенные на разъеме, с помощью которого производится подключение автомагнитол pioneer. Отвечают они за входящий сигнал к правому и левому каналам. - Чтобы убедиться в правильности отключения именно тех проводов, которые необходимы, нужно включить автомагнитолу и по отдельности коснуться пальцем каждого провода. При увеличении громкости, можно услышать в динамиках характерное гудение.
Бояться, что ударит током не стоит: в схеме напряжение низковольтное, поэтому рукам ничего не угрожает. - Припаиваются к проводам разъемы по типу напоминающих тюльпан. В этом случае, можно будет подключать к автомагнитоле разные устройства, с помощью переходников, или припаять напрямую от наушников разъем.
- Линейный вход можно сделать и немного по-другому: открывается автомагнитола и отыскиваются в ее схеме все метки, отвечающие за распайку входа Line-in. Они, в основном, так и метятся: Line-R, Line-Lи Line GND.
Касанием каждым пальцем контакта можно проверить правильность определения «назначения». - Для линейного входа на печатных платах часто предусмотрены контакты. Нужно найти эти контакты, припаять к ним разъемы и провода для подключения, с помощью переходников устройств.
- Подобным образом отыскиваются входы звукового сигнала на микросхеме усилителя. Но, сначала нужно разобраться в сути работы: сигнал поступает от источника к внешним выходам и усилителю.
Чаще всего все эти устройства монтируются на одной плате, но иногда усилитель выносится и на отдельную плату. - Отыскиваются на схеме магнитолы конденсаторы, а затем рядом с ними припаивается провод, который нужен, чтобы подключить внешнее устройство. Проверяется правильность распайки тоже, методом тестирования, притрагиваясь пальцем ко всем проводам.
После выполнения всех операций, к автомагнитоле pioneer можно будет подключить mp3-плеер, телефон и другие устройства.
О wi-fi и не только…
Да, магнитолы можно подключать к Wi-fi. Для этого необходимо наличие встроенного Wireless интерфейса (REALTEK 8188EUS moodle, к примеру). В случае если имеется встроенный интерфейс беспроводной передачи данных, пользователь сможет подключиться к интернету посредством раздачи Wi-fi-соединения со смартфона, или получив доступ к ближайшей точке (например, около McDonnalds’а).
Также можно воспользоваться специальными адаптерами, коих очень много. Они используют любой USB-вход в машине и «раздают» точку Wi-fi. Заряд такие девайсы держат около 4-5 часов. Здесь можно прочесть о способе, который объяснит, как подключить модем к магнитоле на Андроиде.
Инструкция:
- Покупаем адаптер на aliexpress или ebay;
- Подключаем его к USB-входу (прикуриватель, превращённый в USB или выход на передней панели самой магнитолы);
- Включаем модем и ждём, пока загорится индикатор работы устройства;
- На автомагнитоле включаем поиск беспроводной сети и ищем адаптер;
- После нахождения адаптера необходимо ввести пароль (стандартно это 12345678, если не подошёл, смотрим инструкцию к модему) и подключаемся к нему;
- Используем интернет.
Далее в статье читатель сможет найти информацию о том как ещё можно подключить интернет к магнитоле на андроиде.
Особенности разъемов iso
По стандарту ISO в комплект входят два штекера разных цветов:
- Коричневого – для обеспечения выхода на акустику машины звука.
- Черного — для питания устройства и некоторых дополнительных функций.
При подключении автомагнитолы нужно обеспечить правильное соединение плюсового провода.
Совет: Для подключения изделия нужно использовать плюсовой провод от АБК и соединять его через предохранитель. Диаметры проводки и на разъеме автомагнитолы должны быть одинаковыми или на проводке больше.
Больше про Хуавей: Как настроить часы Huawei Band 2 Pro | InfoHuaweiЧтобы уменьшить утечку электроэнергии, автомагнитолу можно подключить по схеме, показанной на фото.
Схема подключения автомагнитолы
- Синий, обеспечивает включение антенны.
- Красный, сигнализирует включение автомагнитолы от замка зажигания.
- Желтый, обеспечивает питание от АБК.
- Черный – подключение земли.
- Диоды, используются разные, можно брать со слабым током типа КД522Б.
После установки устройства подключение производится подачей полюса на красный и желтый провода:
- Красный – силовой, отключает автомагнитолу.
- Желтый – отвечает за настройки и питание памяти изделия.
Как подключить автомагнитолу pioneer к автомобилю можно увидеть на видео.
Подключение автомагнитолы пионер
От правильного подключения автомагнитолы в автомобиле зависит надежность ее работы, сохранность зарядки аккумулятора, четкость воспроизводимых звуков. Устройство подключается посредством разъемов, которые бывают:
- ISO разъемы, соответствующие международному стандарту.
Совет: Использование такого типа разъемов должно выполняться строго по целевому назначению, иначе можно вывести из строя оборудование.
- Индивидуальные.
Для удобства берется переходник, на одном конце которого расположен ISO разъем, а другой подключается к проводке автомобиля. Но соединение проводов может быть не достаточно надежным, тогда это будет поводом для короткого замыкания.
Совет: Лучше один раз приобрести разъем стандарта ISO, цена их приемлемая для каждого автолюбителя, и не испытывать в дальнейшем проблем с подключением новых магнитол.
Читайте также: