
Как из двигателя постоянного тока сделать двигатель переменного тока
Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую.
В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя.
Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря.
Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину.
В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам:
- расширение применения электродвигателей находится в прямой зависимости от удешевления электрической энергии, т. е. от создания генератора, более экономичного, чем гальванические элементы;
- электродвигатели должны иметь по возможности малые габариты, большую мощность ибольший коэффициент полезного действия;
- этап в развитии электродвигателей связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом.
Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока.
В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался.
В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями.
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта).
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
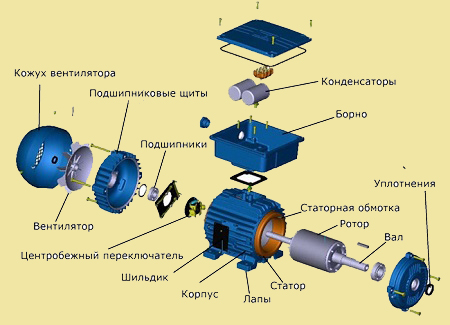
Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором.
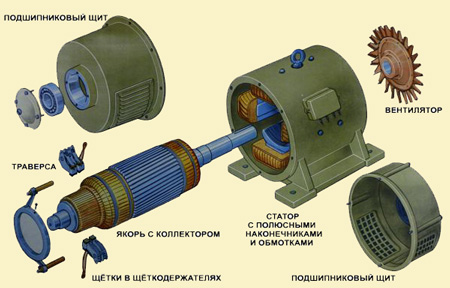
Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах - специальная обмотка, служащая для улучшения условий коммутации.

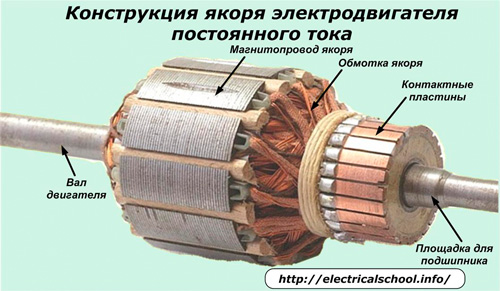
Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя.
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях).
Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины.
Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса.
Рис. 2. Упрощенное изображения коллектора
Рис. 3. Выпрямление переменного тока с помощью коллектора
Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним.
Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной.
Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку.
Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось.
В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет.
В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее.
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.

Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву.
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
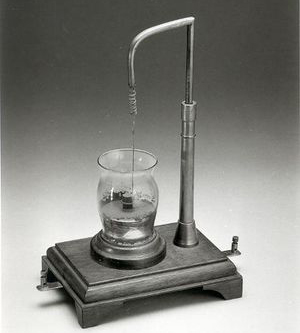
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
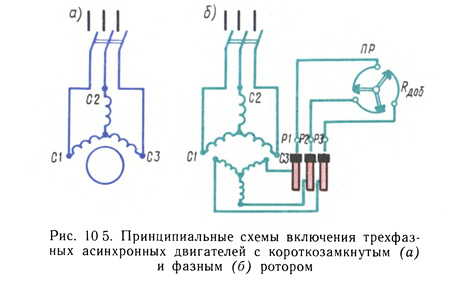
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.

Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
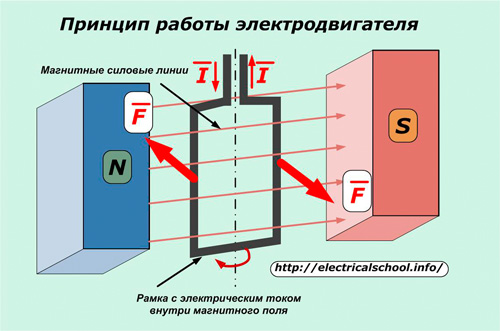
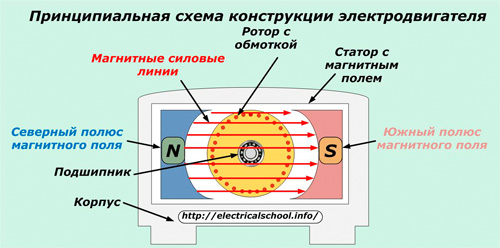
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
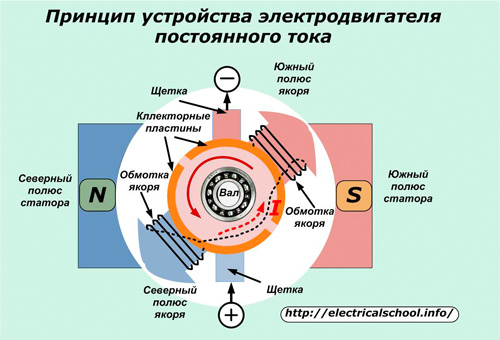
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
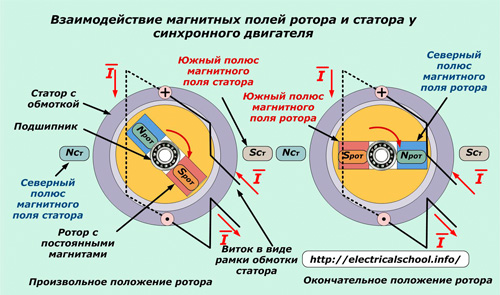
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
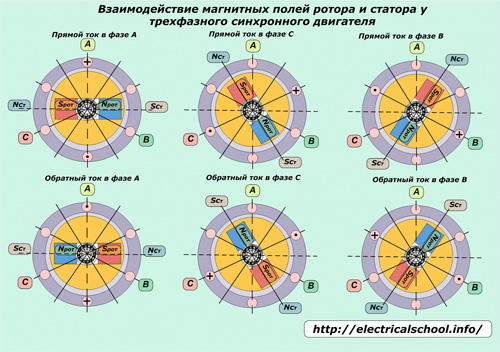
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе . Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
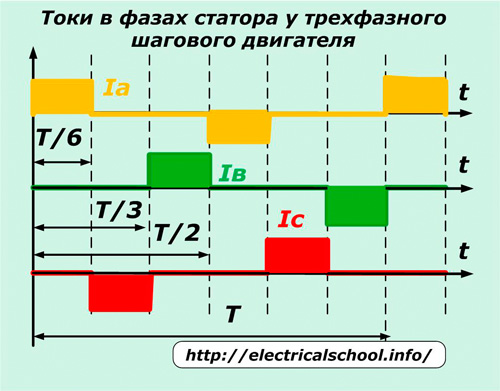
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
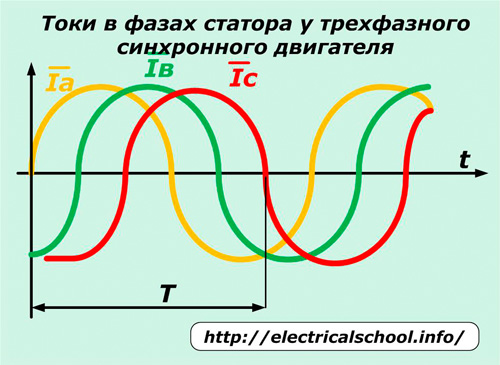
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
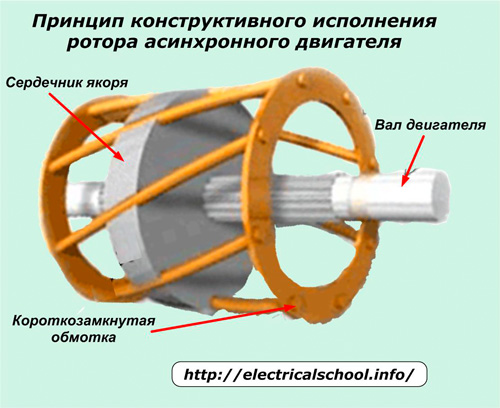
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
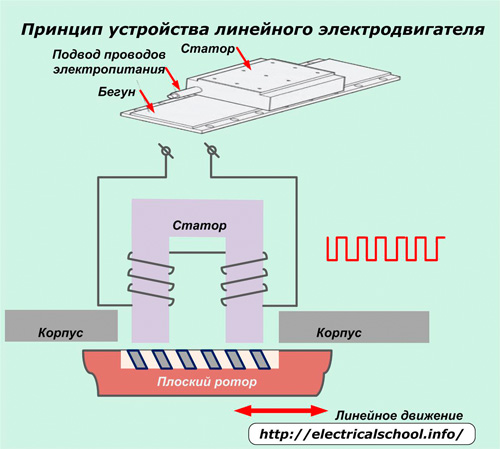
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Универсальный двигатель - вращающийся электродвигатель, который может работать при питании от сети как постоянного, так и однофазного переменного тока [1].
Конструкция универсального электродвигателя
Конструкция универсального коллекторного электродвигателя не имеет принципиальных отличий от конструкции коллекторного электродвигателя постоянного тока с обмотками возбуждения, за исключением того, что вся магнитная система (и статор, и ротор) выполняется шихтованной и обмотка возбуждения делается секционированной. Шихтованная конструкция и статора, и ротора обусловлена тем, что при работе на переменном токе их пронизывают переменные магнитные потоки, вызывая значительные магнитные потери.

Секционирование обмотки возбуждения вызвано необходимостью изменения числа витков обмотки возбуждения с целью сближения рабочих характеристик при работе электродвигателя от сетей постоянного и переменного тока [2].

Универсальный коллекторный электродвигатель может быть выполнен как с последовательным, так и с параллельным и независимым возбуждением.
В настоящее время универсальные коллекторные электродвигатели выполняют только с последовательным возбуждением .

Таким образом, результирующий электромагнитный момент при работе двигателя от сети переменного тока пульсирует. Пульсации электромагнитного момента практически не нарушают работу двигателя. Объясняется это тем, что при значительной частоте пульсаций электромагнитного момента () и большом моменте инерции якоря вращение последнего оказывается равномерным.
Управление универсальным электродвигателем
-
Способы подключения универсального электродвигателя к сети питания:
- симисторный
- транзисторный
Особенности универсального двигателя
Коэффициент полезного действия универсального двигателя при его работе от сети переменного тока более низкий, чем при его работе от сети постоянного тока. Другой недостаток универсального двигателя — тяжелые условия коммутации, вызывающие интенсивное искрение на коллекторе при включении двигателя в сеть переменного тока. Этот недостаток объясняется наличием трансформаторной связи между обмотками возбуждения и якоря, что ведет к наведению в коммутируемых секциях трансформаторной ЭДС, ухудшающей процесс коммутации в двигателе.
Наличие щеточно-коллекторного узла является причиной ряда недостатков универсальных коллекторных двигателей, особенно при их работе на переменном токе (искрение на коллекторе, радиопомехи, повышенный шум, невысокая надежность). Однако эти двигатели по сравнению с асинхронными и синхронными при частоте питающего напряжения f = 50 Гц позволяют получать частоту вращения до 10 000 об/мин и более (наибольшая синхронная частота вращения при f = 50 Гц равна 3000 об/мин) [3].
Области использования
Благодаря тому, что универсальный двигатель может иметь высокую скорость вращения при работе от однофазной сети переменного тока без использования дополнительных преобразовательных устройств, он получил широкое применение в таких домашних приборах как пылесосы, блендеры, фены и др. Так же универсальный электродвигатель широко используется в таких инструментах, как дрели и шуруповерты.
Благодаря тому, что скорость вращения универсального двигателя легко регулируется изменением величины питающего напряжения ранее он широко использовался в стиральных машинах. Сейчас благодаря развитию преобразовательной техники более широкое использование получают бесщеточные электродвигатели (СДПМ, АДКР) скорость вращения которых регулируется изменением частоты напряжения питания.
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе . Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.
Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Читайте также: