
Стиральная машина это робот
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робот (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма.
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
“Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.” И. М. Макаров, Ю. И. Топчеев. “Робототехника: История и перспективы”
Сведения о первом практическом применении прообразов современных роботов — механических людей с автоматическим управлением — относятся к эллинистической эпохе.
Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136—1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.

Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн, скорее всего, основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков.

Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Несмотря на их высокую стоимость, численность промышленных роботов в странах с развитым производством быстро растёт. Основная причина массовой роботизации такова:
Медицинские роботы
В последние годы роботы получают всё большее применение в медицине; в частности, разрабатываются различные модели хирургических роботов.
Ещё в 1985 году робот Unimation Puma 200 был использован для позиционирования хирургической иглы при выполнении биопсии головного мозга, проводившейся под управлением компьютера.
В 1992 году разработанный в Имперском колледже Лондона робот ProBot впервые осуществил операцию на предстательной железе, положив начало практической роботизированной хирургии.

С 2000 года компания Intuitive Surgical серийно выпускает робот Da Vinci, предназначенный для лапароскопических операций и установленный в нескольких сотнях клиник по всему миру.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.

Всё большую популярность набирают роботы-уборщики (по своей сути — автоматические пылесосы), способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п.

Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли).
В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.

Получили распространение в войсках и летающие роботы. На начало 2012 года военными во всём мире использовались около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
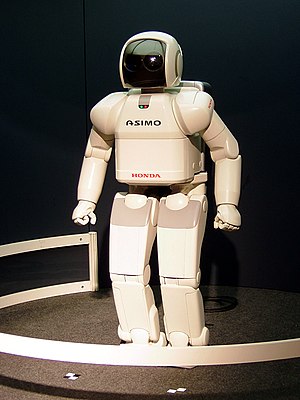
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).

Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Также известны роботы, использующие принципы движения живых организмов — змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.

Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.

Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).

Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших — iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводятся выставки роботов, напр. самая крупная в мире International robot exhibition (iRex) (проводится в начале ноября раз в два года в Токио, Япония).
Если вы хотите получать больше статей, подобно этой, то кликните Recommend ниже.
Выбор стиральной машины для дома — относительно несложная задача (по сравнению со многими другими видами бытовой и компьютерной техники), однако и тут есть свои нюансы. Поэтому правильнее всего будет заранее определиться с основными критериями, что позволит свести к минимуму число конкретных моделей, среди которых нужно будет сделать окончательный выбор. Давайте перечислим эти параметры и посмотрим, на что они влияют.
Тип и размер стиральной машины
Наиболее простой и очевидный параметр — размеры вашей будущей стиральной машины и тип загрузки белья (фронтальный либо вертикальный).

Большинство стиральных машин имеет высоту 81-85 см. У компактных моделей, которые устанавливаются под раковиной, высота не превышает 65-70 см. Встраиваемые машины оснащаются ножками, позволяющими изменить высоту таким образом, чтобы машина подошла под высоту кухонного гарнитура. Добавим, что если вы предпочитаете модель с вертикальной загрузкой, то к высоте машины нужно будет добавить несколько десятков сантиметров для открывающейся крышки. То же самое верно и для модели с горизонтальной загрузкой: лучше заранее проверить, насколько удобно будет открывать люк при повседневной эксплуатации.

Узкая стиральная машина Gorenje W 65Z03/S — редкий пример нестандартного дизайна
Более популярные машины с фронтальной загрузкой потребуют около 50 сантиметров свободного пространства перед машиной для того, чтобы полностью открыть загрузочный люк. Кстати: одна из современных тенденций, которую можно только поприветствовать — делать загрузочные люки стиральных машин с фронтальной загрузкой как можно большего диаметра. Это действительно существенно упрощает и облегчает процесс загрузки белья.
Активаторные машины
Отметим, что помимо традиционных барабанных стиральных машин также существуют машины активаторного типа. В машине активаторного типа белье загружают сверху в неподвижный бак, а перемешивание содержимого бака происходит за счет работы активатора — крутящегося вала с лопастями. Надо сказать, что такие машины не слишком распространены. В первую очередь из-за того, что большинство из них не подключаются к водопроводу и потребуют от пользователя, чтобы он наливал и сливал воду вручную (с помощью специального шланга). Отжим в таких машинах если и присутствует, то, как правило, в виде отдельного барабана-центрифуги. Модели, в которых стирка и отжим производятся в одном баке, не слишком распространены. Зато такие машинки можно использовать там, где нет водопровода. Например, на даче.
Стирающие вещества
Наиболее распространенной является схема, при которой стиральная машина снабжается выдвижным ящиком с тремя отсеками: под стирающее средство для предварительной стирки, стирающее средство для основной стирки и ополаскиватель. Первые два отсека опять-таки традиционно и в подавляющем количестве случаев подразумевают использование порошковых стирающих средств, ополаскиватель же, наоборот, предполагается жидкий.
Устраивает эта схема практически всех, кроме тех, кто пользуется гелем, но не желает полностью отказываться от предварительной стирки: во всех остальных случаях гель можно заливать прямо в барабан, но после предварительной стирки будет произведен слив, и основная будет проходить просто без стирающего средства. В этом случае стоит поискать модель, в которой ящик снабжен дополнительной перегородкой, препятствующей выливанию геля: эта перегородка снимается при использовании порошка и устанавливается, если вы пользуетесь гелем.
Существуют стиральные машины с автоматической подачей стирающего средства: в специальные емкости в машине заливается стирающий гель и кондиционер-ополаскиватель, после чего можно просто загружать белье и выбирать программу стирки — нужное количество средств машина на соответствующих этапах добавит сама. Главное — не забывать вовремя доливать средства в резервуары: в некоторых моделях контроль за их наличием полностью переложен на пользователя.
Инверторный двигатель
Не так давно на рынке появились стиральные машины с инверторным двигателем, конструкция которого не подразумевает использования щеток, а следовательно, такой двигатель будет отличаться пониженным износом. Ключевой особенностью такого двигателя является наличие частотного преобразователя, который изменяет скорость и частоту оборотов барабана, преобразуя ток из постоянного в переменный. Это позволяет более точно управлять работой механизма.
По сравнению с традиционными инверторные двигатели работают практически бесшумно, а их КПД оказывается выше в среднем на 20%. К тому же инверторные машины способны отжимать белье на большой скорости.
Несмотря на все вышесказанное, мы не можем однозначно заявить, что покупка стиральной машины с инверторным двигателем — безусловно рациональное решение с точки зрения соотношения цены и качества. Цена таких двигателей высока, высокой окажется и цена ремонта в случае, если он выйдет из строя.
Качество стирки и отжима
Следующий пункт, который обычно интересует человека, выбирающего стиральную машинку — это качество стирки и отжима белья. От первого параметра зависит то, насколько чистым окажется ваше белье после стирки. От второго — насколько сухим оно будет.
А вот класс отжима — вполне понятная и адекватная характеристика, по которой можно понять, насколько сухим (или наоборот — насколько сырым) будет белье, которое вы достанете из стиральной машины.
- A (менее 45% влажности)
- B (45%—54% влажности)
- C (54%—63% влажности)
- D (63%—72% влажности)
- E (72%—81% влажности)
- F (81%—90% влажности)
- G (более 90%)
При этом на рынке широко представлены модели в диапазоне от А до E, а следовательно, данный параметр является весьма существенным при выборе.

Hoover Dynamic Next со скоростью отжима до 1500 оборотов в минуту
Качество отжима можно также определить по максимальной доступной скорость отжима. Для большинства домашних стиральных машин она обычно находится в диапазоне от 800 до 1200 оборотов в минуту. Для большинства бытовых задач вполне достаточно 1000 об/мин, а более высокие значения обычно означают, что на машину будет возложена бо́льшая нагрузка (например, предполагается стирать много белья для большой семьи).
Класс энергопотребления и расход воды
Раз уж мы заговорили о различных классах, не будет лишним упомянуть и класс энергопотребления. Тут принята точно такая же шкала — от А+++ до G. Расчеты производятся для стирки 1 килограмма хлопкового белья при температуре воды 60 °C.
Модели класса А, которые ранее были самыми экономичными, расходуют менее 0,19 кВт·ч/кг. Классу А+ соответствует расход менее 0,17 кВт·ч/кг, А++ — менее 0,15 кВт·ч/кг, и А+++ — менее 0,13 кВт·ч/кг. Помимо этого для каждой машины указан стандартный расход воды за одну стирку. В среднем этот параметр составляет от 36 до 60 литров, хотя можно встретить и модели, которым потребуется более 100 литров. Понятно, что при наличии счетчика на воду такой расход воды может существенно повлиять на величину ежемесячного счета.
Сушка белья
Функция сушки белья — довольно полезная возможность, позволяющая воспользоваться свежевыстиранным бельем сразу по завершении работы машинки (конечно, его придется еще погладить). К тому же белье не придется развешивать, а следовательно, появляется возможность сэкономить свободное место в квартире. Если вы решили остановить свой выбор на стиральной машине с функцией сушки, не будет лишним проверить несколько нюансов.
Во-первых, это число программ сушки. Для различных типов тканей подходят различные режимы сушки, поэтому лучше, чтобы ваша машинка была универсальной и могла сушить и синтетические ткани, и хлопок, и шерсть, и т. п.
Во-вторых, нужно не забывать, что максимальный объем белья, который может высушить машина, окажется примерно вдвое меньше, чем максимальный объем белья, который она может выстирать.
В-третьих, отметим, что простые модели просто сушат белье в течение определенного времени, а более продвинутые — замеряют влажность в баке, позволяя таким образом не только сэкономить электроэнергию, но и, например, получить слегка влажное белье, которое лучше всего подходит для глажки.
Уровень шума
Уровень шума — простой и понятный параметр, исходя из которого вы сможете определить, подходит ли ваша машина для установки в непосредственной близости от, например, спальни или в совмещенной кухне-гостиной. Для большинства стандартных ситуаций вполне подойдет машина с уровнем шума не более 55 дБ.
Управление
Практически все современные стиральные машины (за исключением активаторных) имеют электронную систему управления. Однако внешний вид панели управления, как и общее удобство эксплуатации, может отличаться весьма существенно. Некоторые машины оснащены специальным дисплеем, отображающим, на каком этапе выполнения программы находится машина в данный момент. На нем же могут отображаться подсказки и коды ошибок в случае, если что-то пойдет не так.

Стиральная машина Haier HW80-B14686 с крупным дисплеем
У активаторных машин до сих пор можно встретить механическую систему управления, при которой пользователь устанавливает все необходимые параметры вручную — с помощью ручек и кнопок.
Наличие дополнительных программ
В зависимости от потребностей для различных пользователей может оказаться важным наличие тех или иных специальных программ и дополнительных возможностей. Давайте упомянем наиболее важные. Название многих из них говорит само за себя:
Все эти функции имеют смысл только в том случае, если вы действительно планируете хотя бы какими-то из них пользоваться. С нашей точки зрения, минимально-необходимый набор программ выглядит следующим образом:
Этого набора, в комбинации с ручным управлением температурой, вам с вероятностью 99% хватит на все случаи жизни, и он присутствует практически у всех современных стиральных машин.
Fuzzy Logic
Исходя из данных, полученных от этих датчиков, центральный процессор автоматически определяет необходимое время стирки, количество воды и подходящий режим.
Так, например, оптический датчик определит степень загрязнения белья по прозрачности воды, а по скорости загрязнения воды микрочастицами будет определен и характер загрязнения.

Защита от протечек
Наконец, последний, но немаловажный для многих пункт — это защита от протечек. Ведь стиральная машина ежедневно взаимодействует с водой, а следовательно, при выходе из строя какой-либо части может случиться потоп. Наиболее уязвимыми местами в данном случае являются шланги подачи и слива воды, а также непосредственно корпус самой машины.
Робототехника — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Робот (чеш. robot, от robota — подневольный труд или rob — раб) — автоматическое устройство, созданное по принципу живого организма.
Действуя по заранее заложенной программе и получая информацию о внешнем мире от датчиков (аналогов органов чувств живых организмов), робот самостоятельно осуществляет производственные и иные операции, обычно выполняемые человеком (либо животными). При этом робот может как и иметь связь с оператором (получать от него команды), так и действовать автономно.
“Современные роботы, созданные на базе самых последних достижений науки и техники, применяются во всех сферах человеческой деятельности. Люди получили верного помощника, способного не только выполнять опасные для жизни человека работы, но и освободить человечество от однообразных рутинных операций.” И. М. Макаров, Ю. И. Топчеев. “Робототехника: История и перспективы”
Сведения о первом практическом применении прообразов современных роботов — механических людей с автоматическим управлением — относятся к эллинистической эпохе.
Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136—1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн, скорее всего, основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота.
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков.
Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Несмотря на их высокую стоимость, численность промышленных роботов в странах с развитым производством быстро растёт. Основная причина массовой роботизации такова:
Медицинские роботы
В последние годы роботы получают всё большее применение в медицине; в частности, разрабатываются различные модели хирургических роботов.
Ещё в 1985 году робот Unimation Puma 200 был использован для позиционирования хирургической иглы при выполнении биопсии головного мозга, проводившейся под управлением компьютера.
В 1992 году разработанный в Имперском колледже Лондона робот ProBot впервые осуществил операцию на предстательной железе, положив начало практической роботизированной хирургии.
С 2000 года компания Intuitive Surgical серийно выпускает робот Da Vinci, предназначенный для лапароскопических операций и установленный в нескольких сотнях клиник по всему миру.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка AIBO корпорации Sony.
Всё большую популярность набирают роботы-уборщики (по своей сути — автоматические пылесосы), способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Боевые роботы
Боевым роботом называют автоматическое устройство, заменяющее человека в боевых ситуациях или при работе в условиях, несовместимых с возможностями человека, в военных целях: разведка, боевые действия, разминирование и т. п.
Боевыми роботами являются не только автоматические устройства с антропоморфным действием, которые частично или полностью заменяют человека, но и действующие в воздушной и водной среде, не являющейся средой обитания человека (авиационные беспилотные с дистанционным управлением, подводные аппараты и надводные корабли).
В настоящее время большинство боевых роботов являются устройствами телеприсутствия, и лишь очень немногие модели имеют возможность выполнять некоторые задачи автономно, без вмешательства оператора.
Получили распространение в войсках и летающие роботы. На начало 2012 года военными во всём мире использовались около 10 тысяч наземных и 5 тысяч летающих роботов; 45 стран мира разрабатывало или закупало военных роботов.
Роботы-учёные
Первые роботы-учёные Адам и Ева были созданы в рамках проекта Robot Scientist университета Аберистуита и в 2009 году одним из них было совершено первое научное открыти.
Для передвижения по открытой местности чаще всего используют колёсный или гусеничный движитель (примерами подобных роботов могут служить Warrior и PackBot).
Реже используются шагающие системы (примерами подобных роботов могут служить BigDog и Asimo).
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Также известны роботы, использующие принципы движения живых организмов — змей, червей, рыб, птиц, насекомых и других типах роботов бионического происхождения.
Системы распознавания уже способны определять простые трехмерные предметы, их ориентацию и композицию в пространстве, а также могут достраивать недостающие части, пользуясь информацией из своей базы данных (например, собирать конструктор Lego).
В настоящее время в качестве приводов обычно используются двигатели постоянного тока, шаговые электродвигатели и сервоприводы.
Существуют разработки двигателей, не использующих в своей конструкции моторов: например, технология сокращения материала под действием электрического тока (или поля), которая позволяет добиться более точного соответствия движения робота натуральным плавным движениям живых существ.
Помимо уже широко применяющихся нейросетевых технологий, существуют алгоритмы самообучения взаимодействию робота с окружающими предметами в реальном трёхмерном мире: робот-собака Aibo под управлением таких алгоритмов прошел те же стадии обучения, что и новорожденный младенец, самостоятельно научившись координировать движения своих конечностей и взаимодействовать с окружающими предметами (погремушками в детском манеже). Это дает ещё один пример математического понимания алгоритмов работы высшей нервной деятельности человека.
Системы построения модели окружающего пространства по ультразвуку или сканированием лазерным лучом широко используются в гонках роботизированных автомобилей (которые уже успешно и самостоятельно проходят реальные городские трассы и дороги на пересечённой местности с учётом неожиданно возникающих препятствий).
Робот способен открывать и закрывать глаза, двигать губами и бровями, использовать руки и ноги.
Существуют компании, специализирующиеся на производстве роботов (среди крупнейших — iRobot Corporation). Роботов также выпускают некоторые компании, работающие в сфере высоких технологий: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводятся выставки роботов, напр. самая крупная в мире International robot exhibition (iRex) (проводится в начале ноября раз в два года в Токио, Япония).
Если вы хотите получать больше статей, подобно этой, то кликните Recommend ниже.
Ро́бот (чеш. robot , от robota — подневольный труд или rob — раб) — автоматическое устройство, предназначенное для осуществления производственных и других операций, обычно выполняемых человеком (иногда животным). Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях [1] [2] .
Робот может управляться оператором, либо работать по заранее составленной программе.
Содержание
История возникновения слова
Предыстория
Мифические искусственные существа
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею. Также в мифе про Гефеста рассказывается, как он создал себе различных слуг. Еврейская легенда рассказывает о глиняном человеке — Големе, который был оживлён пражским раввином (махараль ми-Праг) Йехудом Бен Бецалелем (1509(?)-1609) при помощи каббалистической магии.
Похожий миф излагается в скандинавском эпосе Младшая Эдда. Там рассказывается о глиняном гиганте Мисткалфе, созданном троллем Рунгнером для схватки с Тором, богом грома.
Технические устройства
Очевидно, первыми прообразами роботов были механические фигуры, созданные арабским ученым и изобретателем Аль-Джазари (1136—1206). Так, он создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертёж человекоподобного робота был сделан Леонардо да Винчи около 1495 года. Записи Леонардо, найденные в 1950-х, содержали детальные чертежи механического рыцаря, способного сидеть, раздвигать руки, двигать головой и открывать забрало. Дизайн скорее всего основан на анатомических исследованиях, записанных в Витрувианском человеке. Неизвестно, пытался ли Леонардо построить робота. [3]
Хронология
Конец XIX века — русский инженер Пафнутий Чебышёв придумал механизм — стопоход, обладающий высокой проходимостью.
1898 — Никола Тесла разработал и продемонстрировал миниатюрное радиоуправляемое судно.
1950-е — Для работы с радиоактивными материалами стали разрабатывать механические манипуляторы, которые копировали движения рук человека, находящегося в безопасном месте.
1960 — Дистанционно управляемая тележка с манипулятором, телекамерой и микрофоном применялась для осмотра местности и сбора проб в зонах высокой радиоактивности.
1968 - Японская компания Kawasaki Heavy Industries, Ltd. получила лицензию на производство робота от американской фирмы Unimation Inc. и собрала своего первого промышленного робота. C тех пор Япония начала неуклонное движение к тому, чтобы стать мировой столицей роботов – с более чем 130 компаниями, вовлеченных в их производство. Изначально сконструированные в США, первые роботы Японии импортировались в малых количествах. Инженеры изучали их и применяли в производстве в таких специфических работах, как сварка и распыление. В 70-х годах были разработаны многочисленные возможности практического применения в данной области.
1979 — В МГТУ им. Н. Э. Баумана по заказу КГБ был сделан аппарат для обезвреживания взрывоопасных предметов — сверхлёгкий мобильный робот МРК-01.
1980– коммерческое начало для роботов, производимых на основе высоких технологий. С этого момента рынок начал расти, несмотря на обвал, произошедший в экономике Японии, и на то, что производство (в основном потребительская электроника) было перемещено за рубеж, что повлияло на уменьшение спроса внутри страны в 90-х годах. Постепенно японская экономика восстановилась, и с 2003 года опять наблюдается рост. В настоящее время на долю Японии приходится около 45% функционирующих в мире промышленных роботов. Если говорить об абсолютных цифрах, то к концу 2004 года в Японии было задействовано 356500 промышленных роботов, на втором месте со значительным отрывом шли Соединенные Штаты Америки (122000 промышленных роботов). Япония также занимает первое место в мире и по экспорту промышленных роботов. Ежегодно эта страна производит более 60 тысяч роботов, почти половина из которых идет на экспорт. Такой разрыв, безусловно, делает нашествие японских роботов еще более заметным.
1986 — в Чернобыле, впервые в СССР применены роботы для очистки радиоактивных отходов.
2007 — МВД России в г. Перми проводило испытания тестового робота-милиционера Р-БОТ 001
Читайте также: