
Как установить ros ubuntu
Установка ROS Kinetic
Добавление репозитория ROS
- Добавляем ссылку на репозиторий в список репозиториев системы
- Добавляем ключ репозитория, чтобы система поняла, что репозиторию можно доверять
Если в процессе добавления ключа возникнет проблема вроде:
Установка ROS
ROS предлагает заготовленные наборы ПО для установки:
- desktop-full - включает большое кол-во нод, симуляторы, средства визуализации и т.п.
- desktop - общий набор нод и средств визуализации
- ros-base - только необходимое ПО для работы ROS, остальное устанавливается по необходимости
Если вы собираетесь работать и с ROS ис компьютерным зрением имейте в виду, что при установке desktop-full или desktop будет установлена версия OpenCV, предоставляемая ROS это версия 3.3.1 без дополнительных и несвободных модулей (например SIFT и SURF) и, возможно, без поддержки CUDA (но OpenCL должен быть). В случае, если обязательно нужна поддержка CUDA в OpenCV лучшим вариантом будет ros-base, он не включает в себя OpenCV и это позволит самостоятельно без проблем установить нужную версию OpenCV.
Настройка ROS
- Инициализация утилиты rosdep для установки зависимостей, нужных для компиляции программ
- Настройка окружающей среды, чтобы различные утилиты ROS и ноды можно было запускать из терминала
Создание вашего рабочего пространства
Создание папки для рабочего пространства в домашнем каталоге пользователя (/home/имя_пользователя)
mkdir - команда создания папки, флаг -p указывает, что необходимо создать директорию src и все родительские директории (т.е. директорию catkin_ws) если они не существуют. Без этого флага будет выведена ошибка о несуществующем каталоге catkin_ws.
Папка catkin_ws является основной папкой вашего рабочего пространства.
В папке src хранятся исходные коды пакетов ROS созданных вами или сторонних пакетов.
Прейдем в созданную папку
Выполним инициализацию рабочего места
После этого для последующей компиляции всех пакетов необходимо будет перейти в папку с вашим рабочи местом и запустить команду catkin_make.
Чтобы иметь возможность запускать ноды из пакетов, находящихся в вашем рабочем пространстве необходимо указать ROS, где их найти.
Это позволить запустить нужные ноды только из текущего терминала.
По желанию можно сделать так, чтобы данная операция выполнялась каждый раз когда вы открываете терминал.
Вы конечно же можете посмотреть оригинальную инструкцию по установке ROS Noetic на сайте ROS Wiki , однако там все на английском и объясняется весьма туманно, я же постараюсь объяснить вам как можно понятнее. Итак, начнем.
Что такое ROS?
ROS — Операционная система для роботов, остов для программирования роботов, предоставляющий функциональность для распределённой работы. ROS был первоначально разработан в 2007 году под названием switchyard в Лаборатории Искусственного Интеллекта Стэнфордского Университета.
Можно ли установить ROS Noetic на другие версии Ubuntu?
Правильного ответа на этот вопрос нет. Отдельные пакеты Noetic вроде как можно установить на другие версии операционной системы, однако стабильность их работы не гарантируется. Поэтому скорее все нет. Итак, давайте все-таки перейдем к самой установке.
Что делать если я использую другую версию Ubuntu
ROS разрабатывался в разных версиях, которые устанавливаются на разные версии Ubuntu.
Версия Ubuntu
Версия ROS
Ubuntu 15.04 & 16.04
Как установить ROS если вы используете другую версию Ubuntu? Легко! Просто во всех примерах кода заменяйте слово noetic на название той версии, которая удовлетворяет вашем характеристикам например вместо ros-noetic , вы можете написать ros-melodic
Подготовка к установке. Настройка репозиториев
Начнем с того, что существуют четыре основных репозитория:
Main - бесплатное программное обеспечение с открытым исходным кодом, поддерживаемое Canonical.
Universe - бесплатное программное обеспечение с открытым исходным кодом, поддерживаемое сообществом.
Restricted - проприетарные драйверы для устройств.
Multiverse - Программное обеспечение, ограниченное авторским правом или юридическими вопросами.
Итак, начинаем настройку. Сначала открываем вкладку "Программное обеспечение Ubuntu" и в настройках "Ubuntu Software" ставим галочки так, как показано на картинке

Далее переходим во вкладку "Other sowtware" и ставим галочки на пунктах Canonical Parthners и Canonical Parthners(source code)

Установка этих параметров поможет корректно установить пакеты ROS
Установка ROS Noetic
Шаг 1
После этого настраиваем свои ключи. После добавление репозитория вводи одну из следующих команд:
В качестве альтернативы мы можем использовать curl вместо команды apt-key, что может быть полезно, если вы находитесь за прокси-сервером:
Шаг 2
Во-первых обновляем пакеты с помощью команды
Шаг 3
Начинаем установку. Для этого надо решить, какой ROS вы хотите себе установить:
Desktop Full - та сборка, которую я вам рекомендую ставить. Эта версия устанавливает все, что только можно: 2D/3D симуляторы и программы восприятия. Для того, чтобы установить эту версию пишем в терминале:
2. Desktop Instal - этот пакет содержит в себе все компоненты на базе ROS, а также и такие элементы как rqt и rviz. Для установки этой версии пишем в терминале следующую команду
3. ROS-Base: (Bare Bones) - это просто голые библиотеки и пакеты ROS. Это тот вариант, который подойдет для продвинутых специалистов. Для установки этого варианта пишем в терминале:
Также вы можете установить какой-либо конкретный пакет ROS воспользовавшись командой:
Шаг 4
Устанавливаем пакет bash, в котором мы будем использовать ROS. Пишем в терминале:
Шаг 5
До сих пор вы устанавливали все, что нужно для запуска основных пакетов ROS. Для создания и управления собственными рабочими пространствами ROS существуют различные инструменты и требования, которые распространяются отдельно. Например, rosinstall - часто используемый инструмент командной строки, который позволяет легко загружать множество исходных кодов для пакетов ROS с помощью одной команды. Для его установки пишем в терминале:
Шаг 6
Прежде чем вы сможете использовать многие инструменты ROS, вам нужно будет инициализировать rosdep. Он позволяет легко устанавливать системные зависимости для исходного кода, который вы хотите скомпилировать, и требуется для запуска некоторых основных компонентов в ROS. Если вы еще не установили rosdep, то самое время его установить. Для этого пишем в терминале:
Шаг 7
Для инициализации rosdep пишем в терминале:
И потом пишем следующее:
Поздравляю вас с установкой ROS Noetic. Теперь вы можете начать программировать собственных роботов с помощью ROS.
В этой статье подробно рассмотрим, как установить ROS Noetic на Ubuntu 20.04.
Шаг 1: Добавьте официальный репо Noetic в Ubuntu
Первым шагом в установке ROS Noetic является добавление официального репозитория ROS Noetic в файл списка источников Ubuntu 20.04.
Чтобы добавить Noetic repo, введите:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.list
Шаг 2: Добавьте официальный брелок ROS keyring
Затем добавьте официальный брелок ROS в вашу систему Ubuntu 20.04. Для этого есть два пути.
Итак, выполните приведенную ниже команду.

Второй способ-использовать команду curl для загрузки официального брелока ROS и добавления его локально.
Вывод “ОК” означает, что ключ успешно добавлен.
Шаг 3: Обновите индекс пакета ROS
Затем мы обновим нашу систему Ubuntu таким образом, чтобы получить информацию о пакете ROS Noetic из репозитория.
Это позволит синхронизировать недавно добавленный репозиторий с онлайновыми репозиториями Ubuntu.
Шаг 4: Установка ROS Noetic на Ubuntu 20.04
ROS имеет несколько метапакетов, которые вы можете установить в соответствии с вашими потребностями.
Ниже приведены официальные ROS метапакеты:
- ros-noetic-desktop-full
- ros-noetic-desktop
- ros-noetic-ros-base
- Ros-noetic-ros-core
Выберите нужный метапакет и установите его с помощью приведенных ниже команд. Например мы установим ros-noetic-desktop-full
Установка ros-noetic-desktop-full
Пакет ros-noetic-desktop-full поставляется со всеми пакетами в ros-noetic-desktop, а также пакетами (ros-noetic-perception) и моделирования (ros-noetic-simulators).
Чтобы установить ros-noetic-desktop-full, выполните следующую команду:
$ sudo apt install ros-noetic-desktop-full
После выполнения команды нажмите клавишу Y, чтобы продолжить установку.
Установка ros-noetic-desktop
- vis
- angles
- common_tutorials
- geometry_tutorials
- ros_tutorials
- roslint
- urdf_tutorial
- visualization_tutorials
Чтобы установить ros-noetic-desktop, выполните следующую команду:
$ sudo apt install ros-noetic-desktop
Установка ros-noetic-base
Ros-noetic-base содержит только базовые пакеты. Он включает в себя пакеты в ros_core и другие базовые инструменты, не связанные с роботом, такие как dynamic reconfigure, nodelets и actionlib.
Чтобы установить ros-noetic-base, выполните следующую команду:
Установка ros-noetic-core
Ros-noetic-core содержит комплект пакетов. Которые включают в себя:
- common_msgs
- gencpp
- geneus
- genlisp
- genmsg
- gennodejs
- genpy
- message_generation
- message_runtime
- pluginlib
- ros
- ros_comm
- rosbag_migration_rule
- rosconsole
Чтобы установить ros-noetic-core, выполните следующую команду:
Шаг 5: Настройка среды ROS
Следующим шагом является настройка среды ROS. Сначала запустите сценарий setup.bash в терминале.
Добавьте файл .bashrc, который расположен в вашем домашнем каталоге, чтобы избежать запуска каждый раз:
Проверьте, выполнив следующую команду:
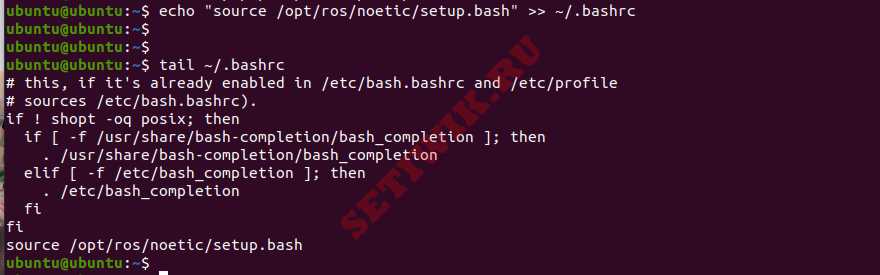
Чтобы изменения вступили в силу, введите:
Проверка установки Noetic
После успешной установки ROS Noetic на Ubuntu 20.04 просто запустите команду roscd.
Вы заметите , что текущий каталог вашего запроса изменяется на /opt/ros/noetic, в котором мы установили Noetic.

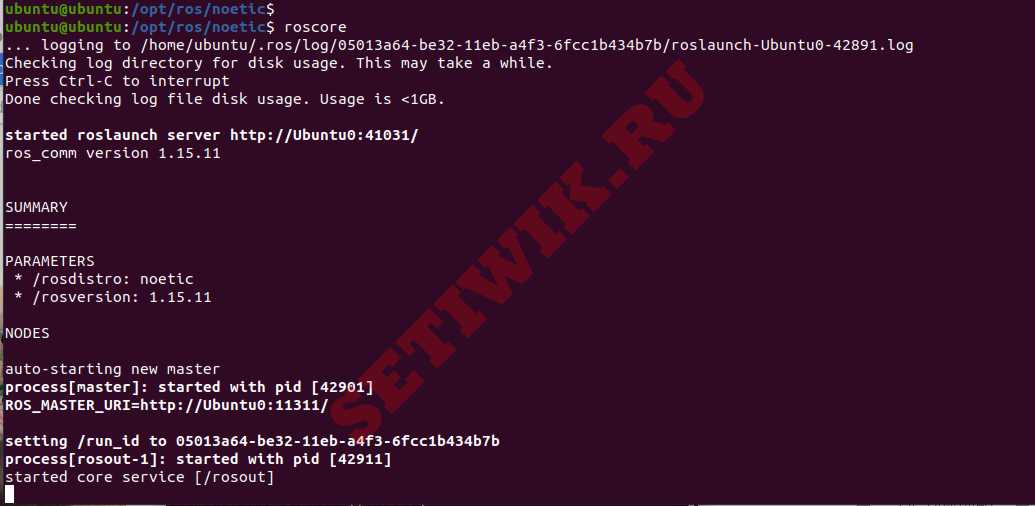
Проверяем установку Noetic
Также можно проверить установку, выполнив команду roscore в каталоге noetic. Выходные данные отображают дистрибутив ros и версию ros в сводке.
Заключение
Из этой статьи вы узнали, как установить ROS Noetic на Ubuntu 20.04. Теперь вы можете программировать своих роботов с помощью Noetic.

Начинаем знакомство с Операционной Системой для Роботов — ROS.
Установка ROS — версия C turtle
Итак, шаг первый — установка.
Для первых экспериментов вполне подойдёт установленная OC Ubuntu Linux под виртуальной машиной .
Как и в экспериментах над роутером — я буду использовать VirtualBox .
Как помним, установка Ubuntu Linux на виртуальную машину особых вопросов не вызывает. Устанавливаем Ubuntu 10.10, но необходимо учесть, что для ROS потребуется не менее 6Гб свободного места на жёстком диске, так что выбирайте динамически-расширяемый образ и задайте размер не менее 20Gb.
Установка ROS под Ubuntu расписана здесь и никаких трудностей не представляет!
Итак, нам потребуются:
1. ПК(сойдёт и виртуальная машина) под управлением OC Ubuntu Linux 10.10,
2. безлимитный интернет (во время установки потребуется загрузить около полутора Гигабайт пакетов, которые займут около 5 Гигабайт жёсткого диска)
Для установки ROS, нужно выполнить следующие пять простых шагов:
1. нужно настроить sources.list, добавив туда адрес сервера ROS, чтобы менеджер пакетов знал откуда брать пакеты
под Ubuntu 10.10 (Maverick) команда:
2. получить ключи
4. установить ROS (параметр команды может отличаться в зависимости от типа установки)
только ROS:
ROS + специфичный стек для робота PR2
Для начала попробуем базовый ROS

! Обратите внимание, что для установки всех нужных пакетов менеджеру пакетов придётся загрузить 1.65 GB архивов, которые после установки займут 4.67 Gb на вашем жёстком диске О_о!
.
.
и вот какоооооооой длиииииииинный список устанавливаемых пакетов получаем на свою голову :)
жмём Y и отправляемся спать или пить цистерны кофе.
Уффф через N-цать часов (в зависимости от скорости вашего интернета) — пакеты закачались и установились :)
Установленную программу нужно искать в каталоге /opt
Там, соответственно, появится директория ros:
/opt/ros
модули(стеки) ROS находятся в директории stacks
, например, стек библиотеки OpenCV — vision_opencv
используемая версия библитеки — 2.1
Но с этим будем разбираться позднее.
5. Завершающий штрих установки — это настройка переменных окружения. Для того чтобы переменные окружения устанавливались каждый раз при начале новой сессии bash нужно выполнить команду:
Если же вы хотите установить переменные окружения только для текущей сессии — можно выполнить команду
из setup.bash вызывается setup.sh, который прописывает переменные окружения:
добавляет $/bin в $PATH
проверить текущее значение переменных окружения можно очень просто:
Обратите внимание, что переменные окружения устанавливаются для текущего пользователя и для другого пользователя данную команду нужно повторить.
Остаётся проверить, что всё установило нормально — для этого можно выполнить команду:
остановить выполнение можно нажав Ctrl+C.
roscore — набор узлов и программ составляющих базу ROS
Итак, базовая версия ROS установилась и даже совсем не сложно!
Теперь пора познакомиться — что же мы установили? :)
Установите ROS Melodic на Ubuntu 18.04 (подробно заполните дыру)
Недавно я узнал о ROS Melodic. В Интернете есть несколько руководств по установке, но они недостаточно подробны. Я сделал это сам, записал весь процесс установки и подробно записал детали и возникшие проблемы, что сэкономило 10 минут для опоздавших. Эта статья относится к статье "Робот-разработка" Актуальные боевые действия ", автор не является мастером.
ROS в настоящее время является самой популярной операционной системой для роботов. Ее основной код написан на C ++ и выпущен под лицензией BSD. ROS возникла в результате сотрудничества Стэнфордского университета и робототехнической компании Willow Garage в проекте Switchyard в 2007 году. В 2012 году команда ROS отделилась от Willlow Garage и создала некоммерческую организацию Open Source Robotics Foundation (OSRF). ROS была передана фонду с 2013 года.
С тех пор, как в марте 2010 года был выпущен первый выпуск Box Turtle, ROS выпускала несколько версий по одной-двум версиям в год. В качестве вторичной операционной системы ROS официально рекомендуется запускать в операционной системе Ubuntu и следовать ритму выпуска Ubuntu. Версия с долгосрочным развитием с периодом обслуживания в 5 лет выпускается в четные годы, а обычная версия с периодом обслуживания в 2 года - в нечетные годы. Но в 2019 году новой версии не было. Исторические версии выпущенных ROS показаны в Таблице 1-1.
Таблица 1-1 Историческая версия ROS
| Версия выпуска | Дата выпуска | крайний срок | Версия Ubuntu | Замечания |
|---|---|---|---|---|
| Melodic Morenia | Май 2018 | Май 2023 г. | 18.04 LTS | LTS |
| Lunar Loggerhead | Май 2017 г. | Май 2019 | 17.04 | |
| Kinetic Kame | Май 2016 | Май 2021 г. | 16.04 LTS | LTS |
| Jade Turtle | Май 2015 г. | Май 2017 г. | 15.04 | |
| Indigo Igloo | Июль 2014 г. | Апрель 2019 | 14.04 LTS | LTS |
| Hydro Medusa | Сентябрь 2013 | Май 2015 г. | 13.04 | |
| Groovy Galapagos | Декабрь 2012 г. | Июль 2014 г. | 12.10 | |
| Fuerte Turtle | Апрель 2012 г. | 12.04 LTS | ||
| Electric Emys | Август 2011 г. | 11.10 | ||
| Diamondback | Март 2011 г. | 11.04 | ||
| C Turtle | Август 2010 г. | 10.04 LTS | ||
| Box Turtle | Март 2010 г. | 9.10 |
1. Настройте источник установки.
Чтобы установить ROS Melodic, вам сначала нужно добавить источник установки в source.list в Ubuntu 18.04 LTS, как показано ниже:
Кроме того, ROS предоставляет внутренний источник установки. Ниже приведен пример кода для добавления источника установки Китайского университета науки и технологий:
2. Добавьте секретный ключ
Добавьте секретный ключ в локальную надежную базу данных и проверьте его следующим образом:
3. Обновите список
Обновите последний доступный список пакетов для Ubuntu 18.04 LTS:
4. Запустите установку.
Далее приступайте к установке ROS.Рекомендуется установить полную версию рабочего стола, чтобы вы могли одновременно установить ROS, rqt, rviz, общую библиотеку роботов, симулятор 2D / 3D, навигацию, восприятие 2D / 3D и другие функции.
Перед установкой необходимо установить другие зависимые библиотеки, однократная установка выглядит следующим образом:
Некоторые люди уже устанавливали некоторые библиотеки раньше, и я установил vtk7 перед установкой opencv на свой компьютер. Версия несовместима и не может быть распознана. Поэтому мне нужно удалить и установить vtk6. Лучше всего выполнить установку этих библиотек.
Наконец, приступим к установке ROS Melodic, метод следующий:
Если вы хотите установить определенный пакет ROS, вы можете сначала просмотреть список доступных в настоящее время пакетов, а затем выбрать пакет, который необходимо установить. Пример кода выглядит следующим образом:
5. Установите основной компонент rosdep
Перед тем, как начать использовать ROS, вам также необходимо установить rosdep. Rosdep - это операционная основа некоторых основных компонентов ROS. Он будет проверять и устанавливать зависимости пакетов при компиляции исходного кода ROS. Способ установки ROS следующий:
6. Настройте переменные среды ROS.
По умолчанию путь к ROS_HOME - «
/ .ros», в котором хранятся файлы журналов и файлы результатов тестирования. Кроме того, при первом запуске ROS необходимо настроить переменные среды.Команда выглядит следующим образом:
Проверьте, правильно ли заданы переменные среды, команда выглядит следующим образом:
Результаты проверки автором переменных окружения следующие:
На этом этапе установлен основной программный пакет ROS.
7. Установите rosinstall
Чтобы создать собственное рабочее пространство ROS и управлять им, необходимо установить rosinstall следующим образом:
После успешной установки вы можете испытать ROS и создавать приложения ROS.
8. Изучите исходный код ROS.
Если вы хотите учиться на основе исходного кода ROS, вы можете загрузить полный исходный код ROS следующим образом:
ROS будет использовать wstool для управления версиями. Если вы хотите продолжить загрузку с точкой останова после прерывания сети, используйте следующую команду:
Что касается того, как узнать больше деталей реализации ROS через исходный код ROS, вы можете просмотреть установку oepngrok в Ubuntu 18.04 LTS, которую я собираюсь представить в следующей статье.
9. Запустите детеныша черепахи.
Turtlesim - это программа моделирования маленькой черепахи, которая поставляется с системой ROS. Шаги следующие:
1. Запустите диспетчер узлов.
Чтобы запустить turtlesim, сначала запустите roscore, чтобы запустить диспетчер узлов ROS. Метод и результаты следующие:
roscore запустит мастер ROS, сервер параметров ROS и узел журнала с именем rosout. ROS Master по умолчанию работает на порту 11311. Если вы хотите указать порт, вы можете обратиться к следующему:
2. Запустите узел ros
Используйте сочетание клавиш Ctrl + Shift + T, чтобы открыть другой терминал и запустить узел turtlesim_node, команда выглядит следующим образом:
3. Используйте клавиатуру
Если вы хотите, чтобы маленькая черепашка могла двигаться, вы можете запустить узел управления turtle_teleop_key клавиатуры turtlesim, использовать сочетание клавиш Ctrl + Shift + T, чтобы открыть другой терминал, и введите команду:
Интеллектуальная рекомендация

Краткое описание общих функций MPI
содержание 1, основная функция MPI 2, точка-точка функция связи 3, коллективная функция связи 1, основная функция MPI MPI_Init(&argc, &argv) Информировать системы MPI для выполнения всех необх.
Примечание 9: EL выражение

JVM память
концепция Виртуальная машина JVM управляет собственной памятью, которая разделяет память во многие блоки, наиболее распространенной для памяти стека и памяти кучи. 1 структура виртуальной машины JVM H.
Проблема сетевого запроса на Android 9.0
вЗапустите Android 9 (API Уровень 28) или вышеНа устройстве операционной системы Android, чтобы обеспечить безопасность пользовательских данных и устройств, использование по умолчанию для зашифрованно.

Учебная запись по Webpack (3) В статье рассказывается о создании webpack4.0.
предисловие Для изучения веб-пакета автор также предпринял много обходных путей. Есть много вещей, которые я хочу знать, но я не могу их найти. Автор поможет вам быстро начать работу. Цель этой статьи.
Читайте также: