
Как поставить linux на stm32
Готовим «взрослую» среду разработки под STM32 в Linux
Ранее мы выяснили, как разрабатывать под микроконтроллеры STM32 с использованием знакомой и понятной многим Arduino IDE. Этот подход, впрочем, не лишен недостатков. В частности, он (1) вводит лишние слои абстракции, что не позволяет писать максимально эффективный и компактный код, (2) работает с весьма ограниченным множеством микроконтроллеров и плат, а также (3) привязан к конкретной среде разработки, и не самой лучшей. Поэтому сегодня мы научимся разрабатывать под STM32 по-взрослому.
Важно! Порог вхождения в мир STM32 довольно высокий. Если вы никогда раньше не работали с микроконтроллерами, я бы рекомендовал начинать с плат Arduino и микроконтроллеров AVR.
Необходимый софт
Нам понадобятся следующие пакеты, часть из которых уже упоминалась в предыдущем посте:
yaourt -S arm-none-eabi-gcc arm-none-eabi-gdb \arm-none-eabi-newlib stlink stm32cubemx openocd
Здесь приведены названия пакетов для Arch Linux, но я довольно уверен, что в других дистрибутивах Linux они называются так же, или как-то похоже. Если вам не удастся найти готовый пакет с STM32CubeMX, программу можно скачать отсюда (потребуется регистрация). Для работы приложению требуется виртуальная машина Java. Несмотря на то, что программа имеет расширение .exe, она превосходно запускается в Linux через java -jar file.exe .
Необходимое железо
Помимо профессионального софта нам также понадобится профессиональное железо. Плата Blue Pill, рассмотренная в прошлом посте, в целом неплоха, но пользоваться ею несколько неудобно. В частности, к ней приходится подсоединять внешний программатор с его лишними проводами. Плюс STM32CubeMX про эту плату ничего не знает, что также вносит свою долю неудобства. Наконец, если у вас этой платы еще нет, вам придется ждать ее доставки с AliExpress.
Компания STMicroelectronics производит собственные отладочные платы серий Discovery и Nucleo. Последние являются более новыми, поэтому сосредоточим свое внимание на них. Платы STM32 Nucleo имеют встроенный отладчик STLink v2.1, что избавляет нас от лишних проводов. Они до определенной степени совместимы с Arduino-шилдами, что может пригодиться. Цены на платы Nucleo в России начинаются от 19$ за плату Nucleo-F030R8, притом купить ее можно в любом Чип-и-Дипе хоть сегодня.
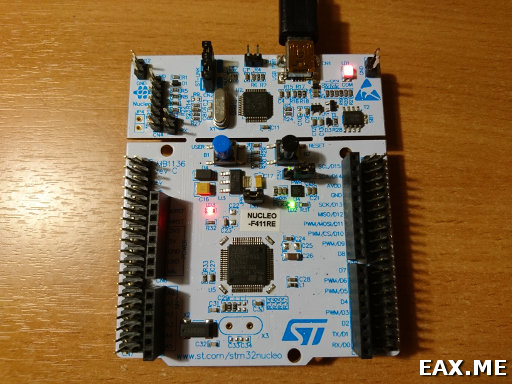
Принимая во внимание разнообразие плат Nucleo, выбор первой платы может быть непростым делом для начинающих. Следует учитывать множество факторов, включая количество Flash-, SRAM- и EEPROM-памяти, максимальную рабочую частоту, используемое ядро Cortex-M, количество аппаратных реализаций SPI/I2C/I2S/UART/CAN-интерфейсов, наличие/отсутствие DAC, ADC и модуля FSMC, энергопотребление, стоимость отладочной платы и ее наличие в ближайших магазинах, и, конечно же, стоимость и доступность самого микроконтроллера. Так как сейчас я не работаю над каким-то конкретным проектом, а просто изучаю микроконтроллеры STM32, я выбрал плату Nucleo-F411RE из-за неплохого соотношения цены и качества. Также меня привлек тот факт, что в микроконтроллере STM32F411RET6, на котором основана эта плата, используется довольно мощное ядро Cortex-M4F со встроенным FPU.
Fun fact! Существуют платы Xnucleo от компании Waveshare, совместимые с платами Nucleo. Платы Xnucleo легко узнать по характерному сине-желтому дизайну. На вид они более продуманы, чем Nucleo, так как используют более общепринятый в наше время разъем micro USB вместо mini USB, лишены дизайнерских «линий надреза» (см предыдущее фото), делающих плату более хрупкой, и имеют впаянный HSE кварцевый резонатор. Также компания Waveshare является производителем множества шилдов для плат Nucleo и Xnucleo.
Создание каркаса проекта в STM32CubeMX
Имеется большое количество отладочных плат и микроконтроллеров, под каждый из которых может требоваться немного измененные версии заголовочных файлов и стандартной библиотеки. Это количество помножим на число всевозможных конфигураций этих микроконтроллеров, например, какие пины для чего используются, какая из внутренних шин на какой частоте работает, и так далее. В плане подобных настроек STM32 является очень гибкой платформой. Получается довольно сложно. Для борьбы с этой сложностью создание каркаса пустого проекта (так называемый scaffolding) для заданной платы или микроконтроллера осуществляется при помощи специальной GUI-программы, STM32CubeMX.
Запускаем программу, жмем New Project. Во вкладке Board Selector находим вашу плату и делаем по ней двойной клик. Если у вас еще нет платы Nucleo, но есть плата Blue Pill и программатор STLink v2, на этом шаге вы можете выбрать микроконтроллер STM32F103C8Tx во вкладке MCU Selector.
Появится интерфейс с несколькими вкладками, из которых наиболее интересной для нас сейчас является вкладка Pinout:

Важно! Если вы используете Blue Pill, в STM32CubeMX обязательно требуется включить SWD. По умолчанию для микроконтроллера STM32F103C8T6 он выключен. В связи с этим, плату вы без труда прошьете в первый раз, но прошить ее во второй будет довольно непросто (хотя возможно). Более подробное описание этой тонкости ищите в заметке Используем STM32 безо всяких отладочных плат.
На двух других вкладках с названиями Clock Configuration и Configuration в этот раз нам ничего менять не придется. На вкладке Power Consumtion Calculator можно оценить энергопотребление микроконтроллера и время его работы в зависимости от выбранного аккумулятора и рабочего напряжения. Надо сказать, довольно любопытная и полезная возможность.
На этом с настройкой покончено. Говорим Project → Generate Code. Во вкладке Project вводим имя проекта (Project Name), выбираем родительский каталог для этого проекта (Prоject Location), в выпадающем списке Toolchain / IDE выбираем вариант «Makefile». Во вкладке Code Generator стоит выбрать опцию «Add necessary library files as reference in the toolchain project configuration file». Иначе в ваш проект будут скопированы все библиотечные файлы, а это более 160 Мб. Затем жмем ОК. Проект STM32CubeMX автоматически сохранится в каталоге с исходным кодом (файл с расширением .ioc), поэтому отдельно сохранять его не требуется.
В противном случае не будут найдены исполняемые файлы компилятора.
Во-вторых, стоит найти переменную OPT и дописать в нее флаг -Wall :
В-третьих, если после этого шага сказать make , вы можете получить ошибки вроде следующих:
main.c:507: multiple definition of `_Error_Handler'main.c:507: first defined here
На момент написания этих строк в STM32CubeMX был баг, заключавшийся в том, что он несколько раз включал одни и те же файлы в список C_SOURCES . Нужно найти этот список в Makefile и убрать из него все повторы.
В-четвертых, Makefile умеет компилировать проект, но не содержит таргетов для прошивания платы, ее очистки, а также подключения по UART. Стоит дописать:
Наконец, из соображений скорее перфекционизма, чем острой надобности, я бы заменил все абсолютные пути на относительные, введя переменную вроде:
На этом подготовку шаблона/каркаса можно считать завершенной! Чтобы не проделывать описанные выше шаги при создании каждого нового проекта, шаблон стоит сохранить где-нибудь в надежном месте. Дабы не приходилось при повторном использовании этого шаблона редактировать имя проекта, стоит также отредактировать значение переменной TARGET на какое-нибудь абстрактное main .
Пишем код!
Если вы откроете файл Src/main.c, то найдете в нем множество отметок вроде:
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
Управление микроконтроллером осуществляется через библиотеку под названием HAL, Hardware Abstraction Layer. Как видите, что касается обычного чтения кнопок и мигания светодиодами, здесь все не намного сложнее, чем в случае с той же Arduino.
Важно! Иногда микроконтроллер не запускается с новой прошивкой без нажатия черной кнопки Reset. По идее, обновление прошивки программатора с помощью утилиты STLinkUpgrade и использование утилиты st-flash с флагом --reset , как в нашем Makefile, исправляет эту проблему. Но так как она воспроизводится нерегулярно, полной уверенности нет.
Заключение
Как видите, все не так уж и сложно. Полученных знаний уже вполне достаточно, например, для того, чтобы написать программу, выводящую что-то на ЖК-экранчик или декодирующую сигнал от джойстика Sega. Можно даже пообщаться с какими-то сторонними модулями по SPI или I2C, хотя и не слишком эффективно, если вспомнить о наличии в микроконтроллере аппаратной поддержки этих протоколов. Однако эти темы, ровно как и ШИМ, чтение аналогового сигнала, работа с прерываниями или отладка кода, увы, выходят за рамки этой и без того уже довольно длинной статьи.
Кстати, к вопросу о выходящем за рамки. Хотя приведенных выше сведений будет вполне достаточно тем, кто пишет в Vim, как в данное время суток это делаю я, или каком-нибудь Sublime Text, кто-то из читателей может предпочитать работать в IDE. Настройка Eclipse для разработки под STM32 подробно расписана в книге Mastering STM32 за авторством Carmine Noviello. Если же вы предпочитаете CLion, его настройку подробно описал Илья Моторный в статье JetBrains CLion для микроконтроллеров.
Полную версию исходников к этому посту, как обычно, вы найдете на GitHub.
Реально ли портировать linux на микроконтроллеры stm32 манипулируя исходниками по блочно и по файльно, особо не влезая в сам исходный код.
Например: есть контроллер stm32 и к нему подключено много датчиков температуры ds18b20 которые работают по протоколу 1-wire. Этот контроллер должен выдавать информацию то же по протоколу 1-wire. В ядре линукс есть поддержка протокола 1-wire как ведущего так и ведомого устройства. По идее можно только взять файлы которые отвечают за этот протокол, может ещё кое что. Я понимаю что для такой задачи stm32 очень много, но это я для примера привёл.
Если это реально, где этому можно научиться или кто может научить.

Не взлетит, там слишком мало ОЗУ для линукса.
Не взлетит, там слишком мало ОЗУ для линукса.
Может я ошибаюсь, но вроде как то портируют.
linux вряд ли заведется, но для такой задачи он и не нужен. Проще будет все реализовать на голом железе. ( тогда и контроллер можно будет взять попроще stm8 к примеру )
( тогда и контроллер можно будет взять попроще stm8 к примеру )
я написал что для такой задачи stm32 очень много, но это может я неудачный пример привёл. Если очень серьёзная задача для которой stm32 как раз подходит, при этом программа должна быть очень большой. Как тогда быть. Не ужели линукс не стартанёт?
Тогда у меня вот какой вопрос, на какое минимальное железо можно портировать linux?

не взлетит, нет MMU. есть мизерный шанс на ucLinux, но рассчитывать на него не стоит. Конкретно для stm32 и DS1820 есть вагон и маленькая тележка библиотек в свободном доступе, а свой собственный велосипед пишется за 2 часа
на какое минимальное железо можно портировать linux?

он весьма тормознутый, поэтому на всякий случай перезалил в облако:
1) Распаковываем файл st-stm32cubeide_1.50.sh из архива, двойное нажатие по нему приведет к созданию папки с таким же именем.

2) Открываем папку, она будет содержать различные файлы (может придется подождать десяток сек):

3) Запускаем терминал ( Ctrl + Alt + T) и пишем путь к создавшейся папке (можно скопировать из строки сверху):

4) Теперь меняем права (это может и не понадобится) и вводим пароль, который запросит:
sudo chmod a+x install.sh

5) Далее непосредственно запускаем файлик установки:

6) Появляется лицензионное соглашение, жмём Ввод (Enter), пока оно не закончится. Принимаем его (прописав игрек в командной строке):

6)Указываем путь установки (папку создавать не нужно):

7) Ждём, пока установится. Высветится окно для ввода пароля, вводим.

8) Откроется окошко с установкой SEGGER J-Link и спросит продолжать ли (Do you wish to continue?). Пишем:

9) Теперь листаем долгий текст (Enter) и соглашаемся со всем (Do you agree with the terms of this license?):

10) Скорее всего таким же образом будет установка двух программ: ST-Link и ST-Link Server.

На этом всё, можно использовать бесплатную среду разработки для программирования микроконтроллеров STM32 на бесплатной операционной системе Linux.

Статья посвящена U-Boot и uClinux. Основной тип операционных систем используемых для микроконтроллеров остается RTOS. При наличии большой бизнес логики используют Linux. Для обеспечения реального времени применяют AMP, RTLinux и др. U-Boot (Universal bootloader) — универсальный загрузчик.
Что касается микроконтроллеров, необходимо значительный объем памяти на микроконтроллере, или поддержка нативной адресации ПЗУ (ROM) со стороны внешней памяти микроконтроллера, в случае отсутствии последнего, bin файл загружается из внешней памяти (NOR, SD и др.) в RAM с нативной адресацией.
Важность Das U-Boot в Embedded Linux системах достаточно лаконично изложена в книге Embedded Linux системы, Карим Ягмур. Текст о U-Boot начинается словами: «Хотя существует довольно много других загрузчиков, Das U-Boot, универсальный загрузчик, возможно, является самым богатым, самым гибким и наиболее активно развивающимся из загрузчиков с открытым исходным кодом». U-boot может использовать следующие файловые системы:
Для работы с U-Boot и uClinux для микроконтроллеров понадобиться репозиторий с github u-boot.
Все эксперименты будут происходит на базе данного репозитория, в качестве отладочной платы используется stm32f746g-disco и операционная система ubuntu 14.04 (можно использовать иные дистрибутивы Linux).
Для сборки u-boot нам понадобиться GNU Cross-Build Tools (возможно вам придется еще установить ia32-libs).
Распаковываем Cross-Build Tools и добавляем его в PATH.
В конце файла добавляем строку.
Основные директории для нашей отладочной платы:
Для примера изменим файл board.c функцию checkboard.
В директории lib-arm нужно открыть файл config.mk и изменить компилятор на arm-uclinuxeabi (можно передать как аргумент при сборке системы).
Сохраняем файл и в корне каталога выполняем следующею команду.
Затем находим необходимый VCP(COM-порт).
Затем bin файл зашиваем в плату с помощью openocd.
Запускаем sudo minicom -s или запускаем sudo gtkterm и
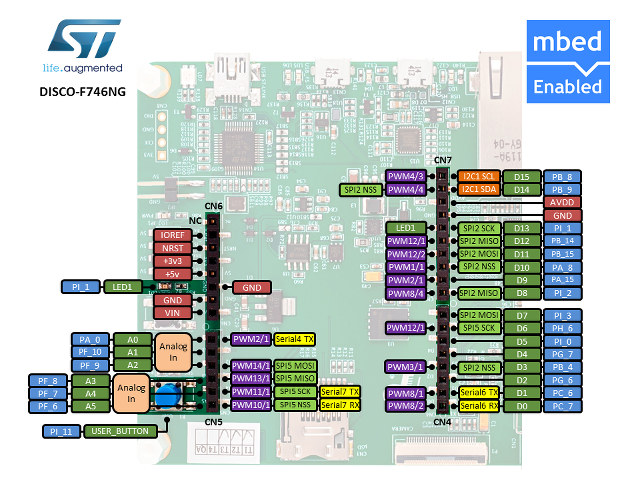
подключить VCP к Serial 6.
Для читателей которые еще не использовали openocd, переходим по ссылке openocd и скачиваем данный репозиторий к себе на компьютер.
Следующим моментом будет настройка tftp сервера.
Аргумент /srv/tftp команды in.tftpd указывает на каталог в котором будут храниться файлы TFTP сервера. Заменим /srv/tftp на /tftpboot.
Создадим директорию /tftpboot:
Чтобы новые настройки вступили в силу, перезапустим службу inetd:
нужно записать в директорию с проектом networking.uImage (скачиваемым образ с emcraft) и настраиваем окружение для u-boot (нужно воспользоваться командой setenv, saveenv, printenv).
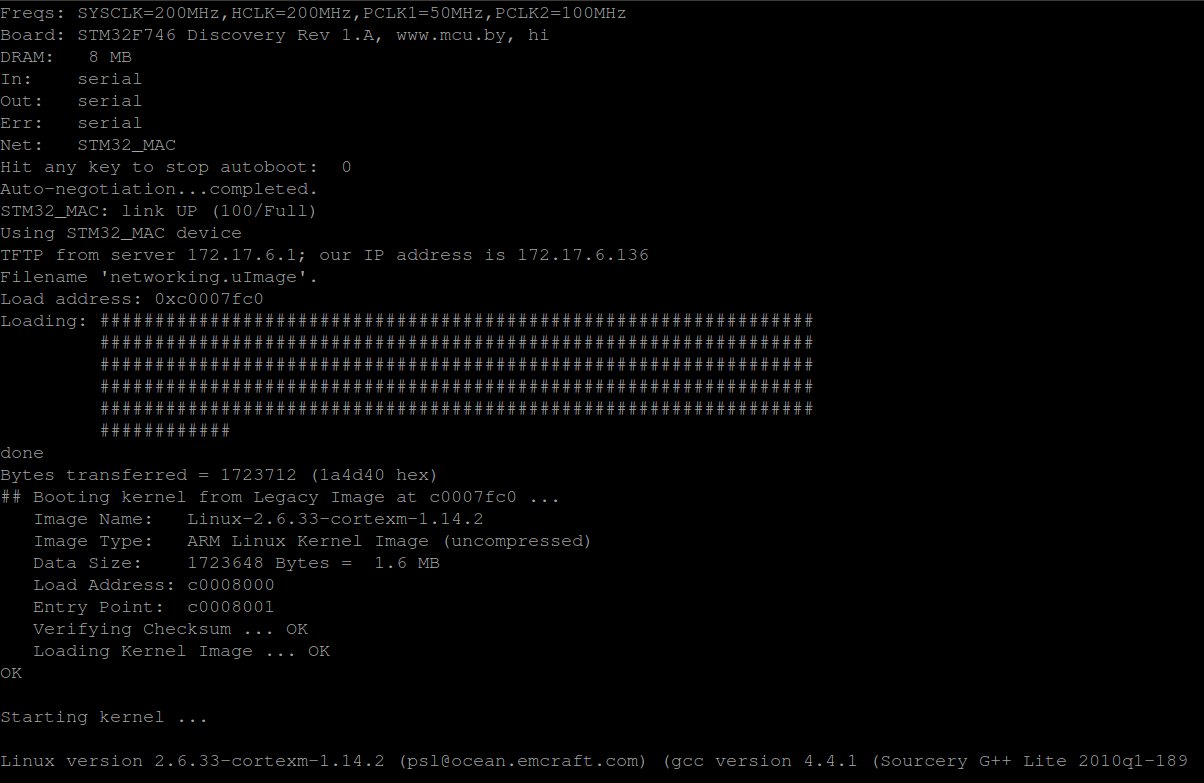
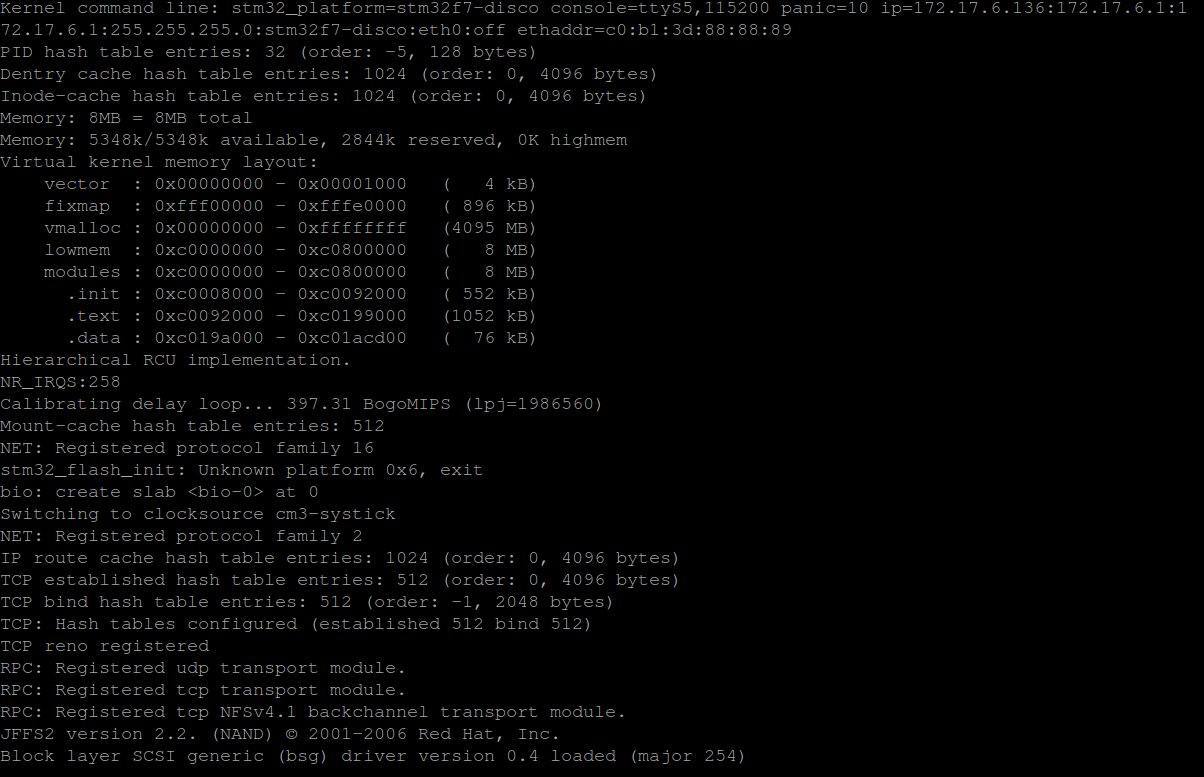
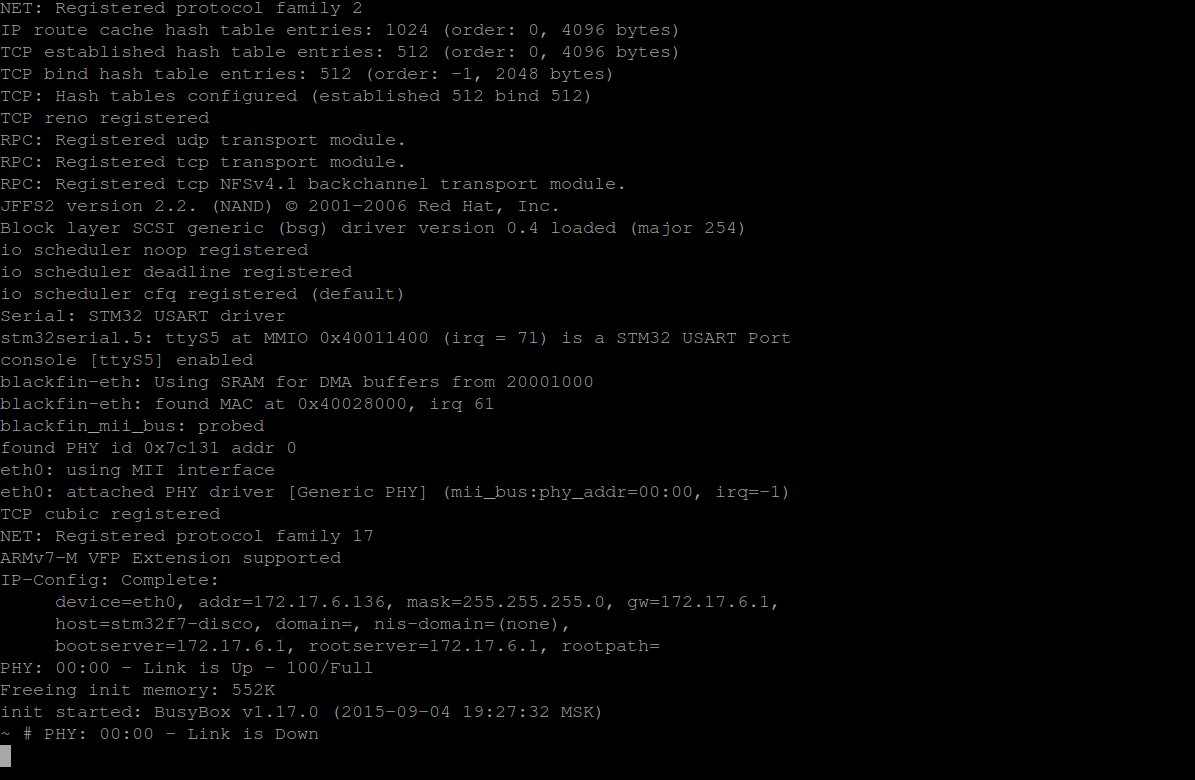
Итого: установили U-Boot и uClinux, собрали исполняемый bin файл и запустили uClinux.
Читайте также: