
Mission planner подключение по wifi
Дальше при подключении моторов начались проблемы. Скажу сразу, что тип рамы, правильность подключения моторов, регуляторы откалиброваны по газу - все это перепроверено и все ок. Первое - после арминга и увеличении уровня газа мог заработать один или два мотора, даже при 100% газе моторы крутились не все и понять алгоритм когда какие запускаются было не возможно. Меняли настройки, ПИДы, калибровали пульт, заново создавали на пульте новую модель - все в пустую. Перепробовав все решил сбросить настройки платы - занова залита прошивка, проведены настройки, откалиброван пульт, после этого моторы начали вращаться все, но опять даже на 100%-м газе крутились они явно не на полную и слабоватенько. При подключении винтов коптер даже не смог взлететь. Пульт, миксы, калибровка пульта в Mission Plannere - все было проделано, на этих же настройках предыдущая плата летала, при подключении напрямую Пульт - приемник - регулятор - мотор реагировал адекватно на уровень газа с пульта. На следующий день опять сделан Reset, заново прошита плата, проведены опять все настройки и калибровки - проверено без пропеллеров, моторы уже реагируют более адекватно управлению с пульта, но при подключении винтов коптер взлетал вибрируя и не реагировал или реагировал очень странно на стики кроме газа, в общем его можно было только поднять в воздух (прошлая плата на настройках по умолчанию летала довольно адекватно) и пытаться приземлить (сломал все шасси((((
В общем летать что-то он совсем не захотел (Опять = тип рамы, расположение моторов и ESC, установка пропеллеров, все перепроверено, ESC прошити Simonk и позже этот коптер на этих регулях, моторах раме но другом контроллере летал без проблем)
А, чуть не забыл про арминг. При подключении по USB АПМ армится без проблем. При питании от BEC ESC от батареи армится ну наверное один раз из трех, постоянно нужно было отключать, подключать заново.
Как будто что-то не то с питанием.
Смущает то, что прошлая плата которую я покупал заработала без проблем, все в ней настроил и все адекватно работало и летало, и вообще не возникло каких либо сложностей на любом этапе постройки/настройки.
Я не знаю, могу ли я вернуть или обменять, т.к. запаял джампер 1 (как и на предыдущей плате, с которой все было ок - джампер нужно установить согласно инструкции питания коптера от ESC BEC, но такого типоразмера нет, поэтому пайка) да и спохватился не сразу, так как плата планировалась на коптер который только сейчас собирается, а летал на другом контроллере, да и на попытки настройки ушло прилично времени, так как до последнего пытался заставить ее полететь. С покупки прошло уже больше месяца.
Поэтому хочу посоветоваться с Вами, что может быть с этой платой не так, что мне вообще можно с ней делать, возможно как-то ее диагностировать или что-то еще. Я постарался по памяти описать вопросы, но может нужна какая-то еще более детальная информация, я все распишу.
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
установите Mission Planner
перейдите на страницу загрузки и выберите самую последнюю версию.

Следуйте инструкциям до завершения установки программы. В процессе установки программа автоматически установит необходимые драйвера. Если у Вас возникает ошибка DirectX , то необходимо его обновление. Если вы получаете предупреждение, как показано на картинке ниже, выберите Установить драйвер для продолжение установки программы.

После установки программы запустите её, она автоматически информирует вас , если есть обновления. Пожалуйста используйте по возможности самую последнюю версию Mission Planner
подключите радиоприемник: PWM или PPM сигналы
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод. Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке

Выберите “соединение” в правом вверхнем углу экрана , что бы загрузить параметры MAVLINK в APM , Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.

Включите передатчик и убедитесь, что он в режиме самолета (Полетному контроллеру необходим режим полета , независимо от платформы на эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw), правая будет контролировать крен (Roll) и тангаж (Pitch) . Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” , нажмите на “калибровка” и правом нижнем углу, Mission Planner выведет окно, что батарея не должна быть подключена , как и моторы с пропеллерами.

Нажмите “ок” и начните двигать стиками в каждую из сторон до предела, а так же трехпозиционный тумблер. наблюдайте за результатами, красные линии установят пределы минимамльного и максимального значения вашего радиопередатчика.

Когда все значения каналов радио смогли показать свой минимум и максимум нажмите в программе “Done”. Данные вам отобразятся в отдельном окне, нормальное значение около 1100 для минимума и 1900 для максимума.

Крепление пропеллеров
Винты должны быть прекреплены в соотвествии с конфигурацией, они устанавливаются в самую последнюю очередь , после того, как все настроено. ниже приводится схема и направление пропеллеров и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus Конфигурация квадрокоптер H рама Конфигурация трикоптер Конфигурация гексакоптер и октакоптер Конфигурация трикоптер Y6 Конфигурация квадрокоптер X8
Предполетная информация
Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами. Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи. Прочтите вики раздел "первый полет" по снятию с охраны (arming) и постановке на охрану (disarm) квадрокоптера, так же по управлению и вариантам полетов.
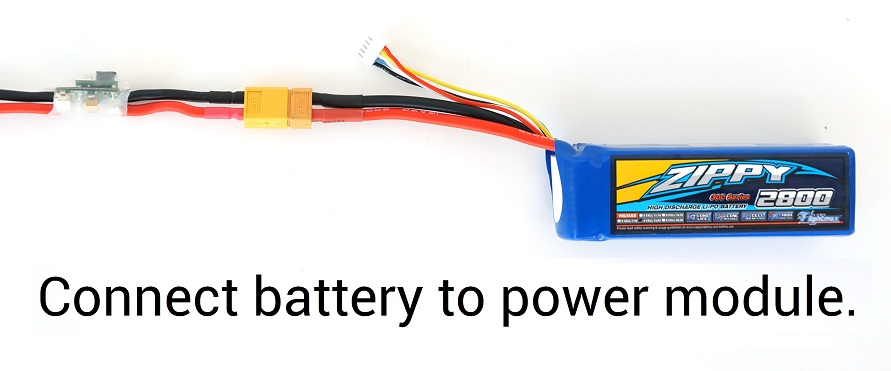
Когда все готово для полетов , установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте безопасному снятию с охраны, что бы это не повлекло "сумашедший полет" (вики)
Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)
Следующие шаги
Постепенно изучайте беспилотные полетные режимы, для получение всех возможностей от ArduCopter, включая режимы Loiter и полет по точкам
Просьба ссылаться на данный ресурс. 2021.
версия 0.75rc
Мы в социальных сетях:
для опытных ардуводов и тех кто боится настроек с бубном
Начнём с подключения всего
Схема подключения классических квадриков и вращение моторов тут
Схема Н тут
Схемы разных трикоптеров тут
Схемы классических гекс и окто тут
Соосная гексатрёха тут
Соосный октоквадр тут
Дальше подключение к ПК и прошивка, программу мишенпланер берём тут после прошивки делаем RESET и erase ОБЯЗАТЕЛЬНО! И ТОЛЬКО ПОСЛЕ НАСТРАИВАЕМ.
Дальше калибруем акселерометр таким образом с одной разницей лучше сделать так:
Дальше калибруем компас такими плясками из этого окошка
вот как на 9хр настроить 6 режимов
Дальше калибруем регуляторы, регуляторы калибровать после каждой калибровки пульта обязательно
или так
А теперь проверим как у нас откалибровалось всё
Перейдём к дополнительным калибровкам
включим чёрный ящик и автотюн (автонавтройка PID) и начало знакомства с мишенпланером
Полётные режимы и и продолжаем знакомство с мишенпланером
ТУТ ОБНОВЛЯЕМАЯ ВСЕГДА САМАЯ НОВАЯ ИНСТРУКЦИЯ но на вражеском языке :
ну и как всегда бонус от меня фпв полёт ночью (видео то что видел я в мониторе) и весёлая полетушка с соседом
Mission Planner - программное обеспечение для настройки и управления ЛА, оснащённого полётным контроллером ArduPilot Mega.
Полное название: Mission Planner Ground Control Station или Mission Planner GCS.
Содержание
Он же экран полётных данных, также содержащий окно HUD (Heads-up Display).

На нём отображаются следующие параметры полёта:
- Красная линия - фактический курс, направление носа (переда) ЛА.
- Зелёная линия - курс назначения с учётом коррекции по треку.
- Чёрная линия - курс, определённый по данным, полученным от GPS (обычно отличается от фактического).
- Жёлтая линия - направление на текущую маршрутную точку, к которой исполняется полёт.
- Desired turn radius - расчётный радиус поворота
- GPS reported altitude - высота по данным GPS
- Latitude - широта
- Longitude - долгота
- Track of recent travel - Трек недавнего перемещения
Вид окна HUD более крупно:
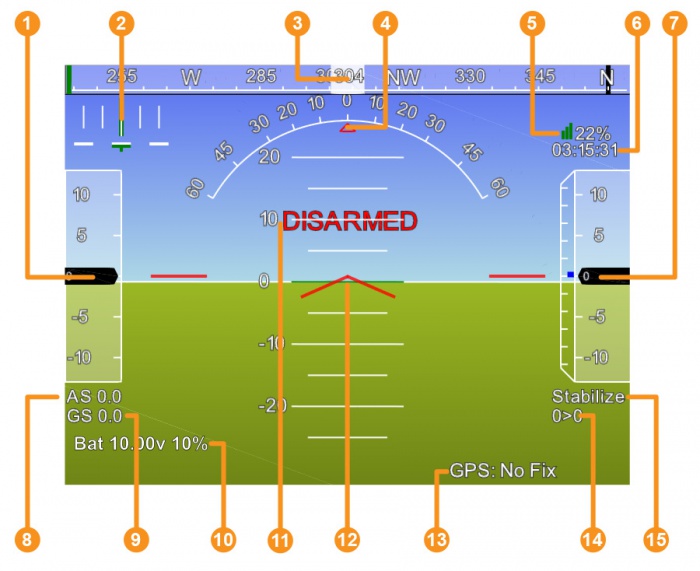
- Air speed или Ground speed - скорость относительно земли (или скорость относительно воздуха, если установлен соответствующий датчик)
- Сrosstrack error and turn rate - ошибка следования треку и скорость поворота
- Heading direction - Курс (направление носа ЛА)
- Bank angle - Угол крена
- Wireless telemetry connection - Качество передачи телеметрийных данных (% потерянных пакетов)
- GPS time - время по данным, полученным от GPS
- Altitude - высота по данным APM (синяя метка показывает скорость изменения высоты).
- Air speed - воздушная скорость (относительно воздуха), показывается только при наличии датчика.
- Ground speed - скорость относительно земли
- Battery status - состояние батареи
- Artificial Horizon - искусственный горизонт, (всегда реверсивен по отношению к крену ЛА).
- Pitch angle - Угол тангажа
- GPS status - состояние GPS-модуля
- Distance to current waypoint > Current waypoint number - расстояние до текущей точки маршрута и её номер
- Current autopilot mode - текущий режим автопилота
- На карте будет показываться текущая позиция только после того, как произойдёт определение координат по GPS. Или в любом случае - при использовании симулятора полёта.
- Как работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево. То есть всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то перепутано, но на самом деле всё в норме. 😉
- Следует в любой момент понимать, какой режим автопилота включен. Для того, чтобы полётный контроллер корректно воспринимал команды MAVlink от Mission Planner, он должен работать в одном из «автопилотных» режимах: Stabilize, Fly-by-Wire, Auto и т.п. Если же контроллер находится в режиме Manual, то все команды будут игнорироваться.
- Двойной клик на окне HUD позволит его распахнуть на весь экран на втором экране.
- Для того, чтобы использовать другие карты взамен Google Maps, нужно нажать Ctrl-F и загрузить собственные карты, которые должны быть подготовлены программой Global Mapper.

Одной из самых интересных особенностей Mission Planner является возможность управлять ЛА не прибегая к помощи пульта и не готовя заранее маршрут полёта. В окне карты в любом месте можно кликнуть правой кнопкой мыши и выбрать “Fly To Here”, то есть «лети сюда». ЛА полетит в заданную точку и зависнет в ожидании следующей команды. Это и есть режим “Guided Mode”, который обладает и другими интересными возможностями.
Внимание: “Guided Mode” - это самостоятельный режим полёта. Выбрав его, полётный контроллер будет оставаться в этом режиме до тех пор, пока не будет выбран какой-либо другой режим. К примеру, если выбрать точку на карте и дать команду “Fly To Here”, то после прибытия в неё ЛА будет зависать над ней до тех пор, пока из Mission Planner не поступит следующей команды, а именно: либо команды переместиться в другую точку, либо переключения в другой режим. Более того, если переключение произойдёт в режим Auto, то миссия (полёт по маршруту) возобновится с той точки, где она была прервана.
Так работает искусственный горизонт: когда ЛА кренится вправо, горизонт наклоняется влево, так как показывает отклонение ЛА относительно реального горизонта т.е. всегда наклоняется в противоположную сторону. Часто это настораживает новичков: дескать, что-то работает неправильно, но на самом деле всё в норме. 😉
Зайти на основную страницу Mission Planner , нажать комбинацию Ctrl+F, нажать Param Gen - это перезагрузит информацию о параметрах и всё будет нормально отображаться.
К примеру, параметр Altitude Hold P в CONFIG/TUNING->Extended Tuning можно менять но значение не сохраняется. Так же и другие параметры (в этом или других окнах). Замечено в свежих версиях Mission Planner (глюки?). Как с этим бороться:
- отключиться в Mission Planner от контроллера, затем заново подключиться;
- установить настройки по-умолчанию;
- найти и поменять параметр в полном списке параметров Mission Planner.
Можно попробовать поменять провайдера карт (на экране планировки миссий). Например, Яндекс-карты хорошо работают.

По задумке - это запретные или ограниченные для полётов территории (вокруг аэропортов, режимных объектов и т.п.). По факту, полёты и выполнения миссий не ограничиваются. Но пилотам следует принимать во внимание эти предупреждения и, по возможности, не осуществлять полёты в этих территориях.
Quanum Nova - это наиболее доступный из готовых квадрокоптеров которые могут носить стабилизирующий подвес с камерой типа GoPro.
Продается квадрик в разных вариантах, с аппаратурой управления, без нее, для него есть подвесы, подробно о комплектации и ссылки на продажу можно посмотреть тут.
Аналогом Новы является Cheerson CX-20, практически полный двойник, кроме надписей.
Инструкцию для этих квадрокоптеров можно прочитать тут, написана для Новы, но подходит и для CX-20.
Воздушные винты:
Штатные 8х4.3, хорошо летает без камеры и подвеса. С подвесом или просто с камерой на авторежимах на этих винтах летает не стабильно.
Для полетов с подвесом: 9х4.5, 10х4.5 На последних летает дольше всего, винты надо укоротить на 2-3 мм, а то задевают друг за друга.


Трехлопастные 9х4.5 - хорошо работают с авторежимами, но очень резкий становится на ручном управлении.

Готов ответить на вопросы по этому квадрокоптеру.
Редактировалось: 1 раз (Последний: 2 июня 2015 в 22:15)Доброго времени суток !
Никак не могу откалибровать Quanum Nova.
1) Вкл питание аккум .
Мигает правый зеленый потом светиться ровно ( нашел спутники)
стик газа в крайнее правое .
Правый красный мигает и сам квадрик мигает БАНО и пищит .
Все что бы не делал какие бы танцы не таневал . не хочет винты запускать ..
Кто что посоветует ,где копать ?
Спасибо !
1. вкл квадрокоптер
2. вкл аппаратуру управления
3. подожав секнд 20 левый стик вниз-вправо
Если не помогает - триммеры стика так же сместить вниз и вправо на 2 сек. Если задержать там на 20 сек - то перейдет в калибровку гироскопов.
Если не помогает - подключить к Mission Planer и убедившись, что передатчик коннектится с коптером, сделать калибровку стиков передатчика.
Так же посмотреть - не слетели ли настройки арминга и на какое действие он настроен.
И вопрос - вы откалибровать или таки заармить пытаетесь?
Редактировалось: 1 раз (Последний: 9 декабря 2014 в 16:53)Зармить ( Ну точнее запустить винты !! ) В ручном режиме !!
Что значит (не слетели ли настройки арминга и на какое действие он настроен.) То есть действий может быть много .
Пытаюсь запустить на окне ..спутники ловит на Mission Planer показывает 3х фиксацию..
Может на улицу выйти ?
Для арминга ловля спутников не нужна, посмотрите в мис.планере на калиброку аппы
Включите радиоаппаратуру, убедитесь, что передатчик находится в режиме самолета (APM необходим режим полета, независимо от типа платформы на экспериментальной основе), установите все стики по центру.

Рекомендуемая настройка RC каналов на передатчике.
Для аппаратуры Mode 1 , левый джостик (стик) будет контролировать высоту (Pitch) и рыскания (Yaw), правый - будет контролировать дроссель (газ, throtle) и крен (Roll).
Для аппаратуры Mode 2 , левый джойстик (стик) будет управлять дроссельной заслонкой (throtle) и рыскания (Yaw); правый - будет контролировать крена (Roll) и тангажа.
Для любого типа передатчика, трехпозиционный переключатель должен быть подключен к 5-му каналу и будет контролировать режимы полета.
По желанию ручки настройки передатчика должны контролировать канал 6 для настройки полетета. 7 и 8 канал могут быть использованы для вспомогательных функций. В Planner Mission, нажмите кнопку "Калибровка Радио" в нижней правой части окна. Mission Planner вызовет диалоговое окно с предупреждением что пропеллеры должны быть сняты!. Выберите OK.

Нажмите OK и начните двигать ручки управления и тумблерами на аппаратуре до их предела и наблюдайте за результатом калибровочных границ радио. Появившиеся красные линии калибровочных баров укажут максимальное и минимальное значения.
Ваше передатчик должен привести следующие изменения управления:
радиоканал 1: низкий = ролл слева, высокий = ролл прямо
радиоканал 2: низкий = шаг вперед, высокая = шаг назад.
радиоканал 3: низкий = дроссельная заслонка вниз (в выключенном состоянии), высокий = дроссельной заслонки до максимума.
радиоканал 4: низкий = рыскания влево, высокий = рыскания вправо.

Когда красные линии для крена, тангажа, дросселя, рыскания и радиоканала 5 (необязательно у радиоканалов 6, 7 и 8) установлены на минимальных и максимальных значениях, выберите нажмите "Done". Mission Planner покажет сводку данных калибровки. Нормальные значения около 1100 для минимумов и 1900 для максимумов. Если значения показания бара идут в противоположном направлении от направления движения стика или тумблера это означает, что канал находится в инверсии на стороне передатчика. Используя меню аппаратуры настройте требуемый канал (установите или снимите инверсию) что бы установить правильное функционирование.

Если аппа откалибрована, а снятие не происходит то вероятно:
APM с прошивкой 3.0.1 (и выше) включает в себя предварительную проверку безопасности при снятии с охраны, которая приводит к тому, что одна из проблем была выявленна:
Проверяет, что была выполнена калибровка Радио.
Проверяет, что была выполнена калибровка акселерометра.
Проверяет, что компас здоровый и правильно передает данные.
Проверяет, что смещение компасе не слишком большое (т.е. корень SQRT (х ^ 2 + у ^ 2 + Z ^ 2) <500).
Проверяет, что калибровка на живую компаса или на базе журналирования была выполнена или что "COMPASS_LEARN" включен.
Проверяет адекватное напряжение магнитного поля: (APM1/APM2 около 330, PX4/Pixhawk около 530)
Проверяет, что барометр здоровый и правильно обменивается данными.
Если круговая ограда (Fence) включена или снимаете с охраны в режиме Loiter проверка безопасности проверяет, что:
у вас есть фиксация спутников по GPS
параметр GPS HDOP < 2.0 (настраивается параметр GPS_HDOP_GOOD)
Путевая скорость меньше 50 см / сек
Проверяет, что полетный контроллер питается между 4,5 и 5,5 вольт для АРМ 1 или АРМ 2
Проверяет, что 7 и 8 канал не настроен на управление на одну и ту же функцию.
Если включен Radio FailSafe проверяет минимальное значение стика газа канала не ниже FS_THR_VALUE
Проверяет параметр ANGLE_MAX (т.е. максимальный угол наклонав большинстве режимов) является больше 10 и меньше 80 градусов
Проверяет уровень PWM по четырем первым каналам , если они меньше 1300 и не больше 1700
Если все остальное нормально, за исключением того, когда вы пытаетесь снять с охраны (Arming) стиком газа вниз и вправо (режим Mode2 на аппаратуре), он будет на самом деле не сниматься с охраны и двигатели не будут вращаться он, вероятно, не прошел проверку Pre-Arm безопасности. Вы должны заметить, что красный светодиод будет мигать двумя быстрыми вспышками по кругу.
Вот видео где все это описывается:
Вариант - настроить все как полагается или отключить проверки.

Чтобы понять, что вызвало сбой Pre-Arm Check:
Подключите свой полетный контроллер к компьютеру через порт USB.
Запустите Mission Planner и соединитесь с ArduPilot нажав кнопку "Connect" в правом верхнем углу.
Включите аппаратуру радиопередатчика и удерживайте стик газа вниз и вправо (процедура постановки на охрану - Disarm).
Первый причиной проверки отказа Pre-Arm безопасности будет отображаться красным цветом в окне HUD Mission Planner.
Каждая проблема и адрес будет сообщаться при попытке снять с охраны, как указано выше.
Когда все проблемы были исправлены, вы увидите проверку "снятия с охраны" (Pre-Arm Check) в окне HUD.
После этого можно отключить от компьютера и имеють хорошую гарантию того, что снятие с охраны (arming) будет происходить в обычном режиме.
Устранение проблем предварительной проверки снятия с охраны (Pre-arm fix):
Если не прошла проверка Радио калибровки - сделайте повторно калибровку радио .
Если не прошла проверка калибровки акселерометра - сделайте повторно калибровку акселерометра .
Если происходит сбой компаса - сделайте заново живую калибровку компаса .
Если проверка барометра (высотомера) не работает, то ваш контроллер скорее всего имеет аппаратную проблему с барометром.
Если проверка позиция GPS не удалась
ждать HDOP вашего GPS, чтобы он опустился ниже 2.0, прежде чем пытаться снимать с охраны. Вы можете сделать это более легко - наблюдая в области быстрого экрана Mission Planner.
Отключите Geofence в Config/Тюнинг -> Geofence
Снимите с охраны (arming) в полетный режим Стабилизации (Stabilize mode) и позже перейдите в режим Loiter (этот режим (loiter) не рекомендуется на момент старта, потому что хорошая фиксация по спутникам GPS требуется для Loiter и HDOP является хорошим показателем того, что GPS позиция хороша)
увеличить параметр GPS_HDOP_GOOD от 200 до 250 (это также не рекомендуется по тем же причинам, что и выше)
Если проверка напряжения питания полетного контроллера не успешная:
проверить UBEC , который используется для подачи напряжения на АРМ напряжение должно быть между 4,5 и 5,5 вольт (чем ближе к 5V, тем лучше)
проверить, если какие-либо периферийные устройства, которые питаются от АРМ и имеют слишком высокий потребляемый ток.
Если на канал 7 и 8 было установлено тоже самое (одинаковая функция) измените один из них с помощью Mission Planner Config/Тюнинг -> PIDS
Читайте также: