
Программы для программирования квадрокоптера tello
Не так давно китайский стартап Ryze Technology, при поддержке таких именитых компаний как DJI (признанный лидер в производстве квадрокоптеров различного уровня) и Intel, выпустил очень интересный квадрокоптер под названием Tello.
По заявлению производителей, которые хоть и позиционируют его, как квадрик бюджетного уровня доступный всем (а это и правда выглядит так, если взглянуть на цены других квадров от DJI), в нем присутствуют такие серьезные вещи как: 14-ядерный процессор от Intel, система визуального позиционирования, куча сенсоров и гироскопов, а также специально разработанное ПО, оценивающее ситуацию в которой квадрик находится, для обеспечения стабильного и качественного полета.
Те же люди заверяют, что летать на нем может любой: хоть ребенок, хоть взрослый, настолько управление интуитивно понятно. Вот тут как раз такой и попался — я ни разу не профессиональный водитель автобуса летун, более того, всегда причислял себя к тем, кто «рожденный ползать, летать не может», хотя регулярно совершаю попытки сам же это и опровергнуть (в кладовке валяются Parrot Ar.Drone 2 и 3-4 штуки других летательных аппаратов). Кроме этого, фишкой дрона является возможность его программирования с помощью простого объектного языка Scratch (специально сделан акцент на простоту освоения детьми) и наличие SDK. Забегая вперед скажу, что слово «программирование» в текущей реализации — это слишком громко сказано…
Итак начнем, как обычно, с упаковки.




Комплетация:
— квадрик,
— аккумулятор,
— 4 винта (в дополнение к установленным),
— съемник для винтов,
— бумажка

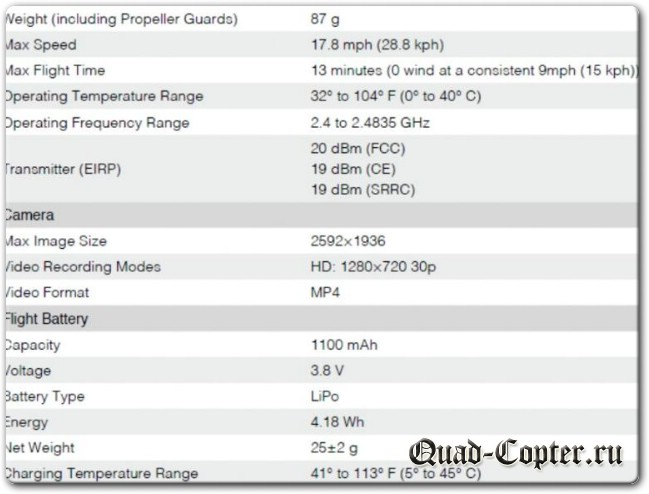
- Максимальная дистанция полета:100 метров
- Максимальная скорость: 8 м/с (28 км/ч)
- Макс. продолжительность полета: 13 минут
- Макс. высота полета:10 метров


Инструкция на Tello в pdf с офф.сайта.
Первое что меня удивило, это его размер — он маленький!



Рассмотрим со всех сторон:

Рама квадрика с кучей ребер жесткости, выполнена из прочного легкого пластика и, как оказалось, она просто неубиваемая.
Винты на Tello не одинаковые и взаимозаменяемы только попарно, по диагонали. На одной паре есть риски на пропеллерах, на другой — нет:


Защита на винтах съемная, выполнена из упругого пластика, но лучше ее не снимать, т, к. движки на этой крохе весьма мощные, я как-то, случайно, коснулся их пальцем во время работы — было больно (на других мелких квадиках, таких острых ощущений никогда при касании не было).
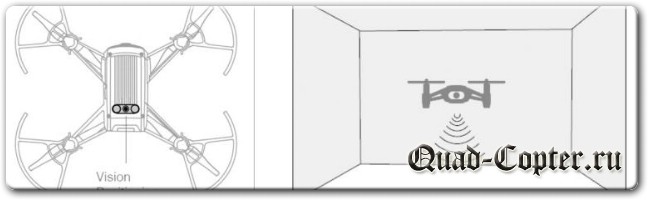
С нижней стороны видны щели обдува (т.к. мощному процессору требуется хорошее охлаждение), датчики и камера системы позиционирования…

… которая называется Vision Positioning System. При работе сквозь линзы заметно красноватое свечение:

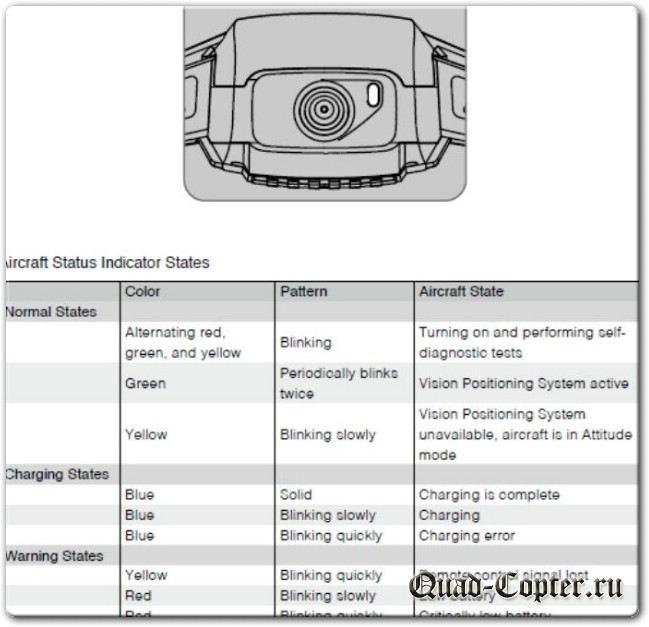
На «мордочке» камера HD720P30 и многоцветный светодиод состояния, который светит различными цветами и мигает с разной интенсивностью, в зависимости от состояния квадрика:

Индикация светодиода в зависимости от ситуации:
Снизу резиновые посадочные ножки, в задние встроены антенны:

Аккумулятор LI-Po 1100mAh, напряжение 3.8V:

Почти полностью занимает внутренности квадрика :)


Заряжается аккумулятор, установленным в квадрик, через его microUSB разъем, установленный на боковой стороне. Включается аппаратец кнопкой на противоположной от разъема стороне:

Заряжаем аккумулятор и взлетаем…
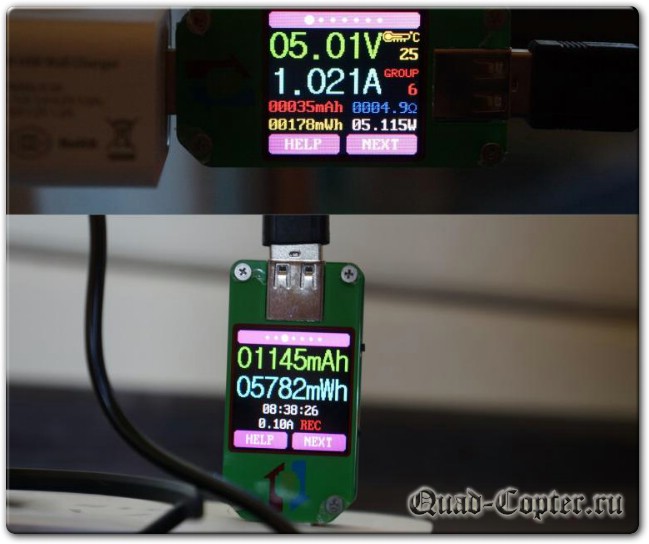
Кстати аккумулятор честный (было бы странно, если бы было по-другому):
Полеты
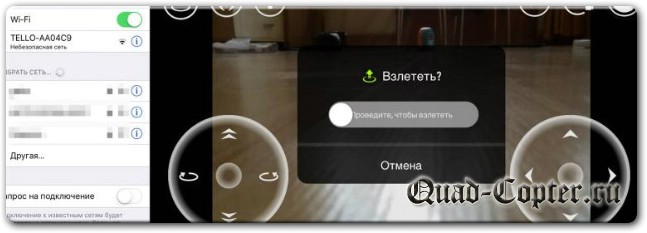
Управляение квадриком выполняется со смартфона с помощью приложения Tello из Apple store или Play Маркета, еще заявлена поддержка, пока только, контроллера GameSir T1D, но это еще 35-40$.
Включаем квадрик, он поднимает свой WiFi к которому коннектим смартфон и в приложении взлетаем не кнопкой, а проведя пальцем слева на право:
Имея опыт управления квадриками со смартфона, особого восторга я не испытывал, однако, тут оказалось все не так плохо, я бы даже сказал очень неплохо. Я не знаю, что сделали разрабы, он елозя по экрану пальцами, удается очень неплохо управлять летуном. Думаю, в этом очень сильно помогает система Vision Positioning System, она позволяет квадрику позиционировать себя в пространстве, ее задача автоматическая стабилизация квадрокоптера в полете, система, по мере своих возможностей, компенсирует все негативные факторы влияющие на стабильное положение квадрокоптера в пространстве, например, сквозняки в помещении или порывы ветра на улице. За счет этого квадрокоптер, при отсутствии управляющих воздействий со смартфона висит, практически, как влитой на одном месте, не смещаясь и не вращаясь вокруг оси (и триммировать его не нужно).
Система, состоит из отдельной камеры и инфракрасного модуля и начинает работать автоматически, сразу после включения квадрика. Работает система в диапазоне высот от 0.3 до 10м (эффективно с 0.3 до 6м)
Настроек в приложении не очень много, есть калибровка — но ни разу не потребовалась, даже после жестких падений, квадрик все далает сам. Регулярно выходят обновления ПО:
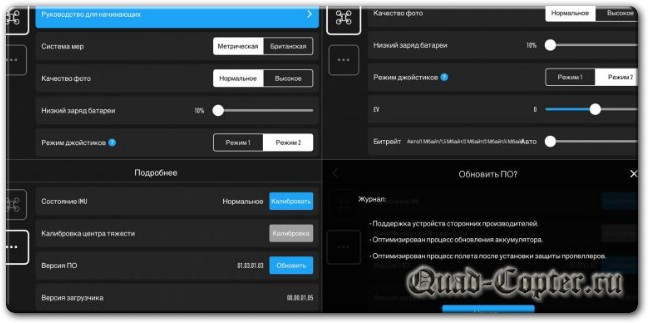
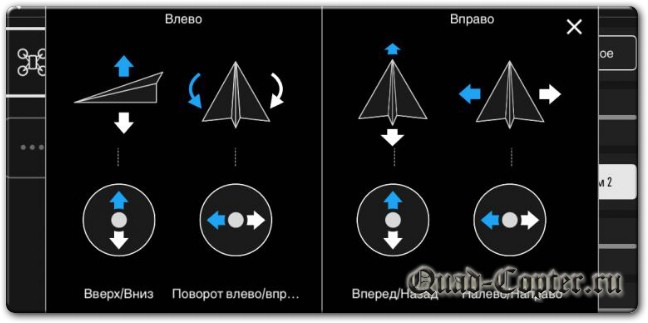
Управление только виртуальными экранными джойстиками, варианта использования акселерометра (управление квадрокоптером наклоном смартфона) нет. Режима Headless (когда квадрик поворачивает вправо или влево одинаково, независимо от того, как повернут к пользователю), также, нет:
После взлета квадрик зависает на высоте около 1.5 метра и там висит пока мы не начнем им управлять:

Были опасения, что это сугубо домашняя игрушка, но, как оказалось, им гораздо приятнее управлять на улице. Мощности двигателей и возможностей системы контроля, хватает для обеспечения стабильного полета даже при некотором ветре, квадрокоптер, до определенной степени, очень быстро сам компенсирует его давление увеличением тяги на нужном двигателе и своим наклоном. Прикольно наблюдать, как машинка, под весьма ощутимым бризом, висит под наклоном на одном месте:


Если к Tello в полете поднести руку снизу, он будет от нее отлетать вверх.
В приложении можно выбрать два режима управления «Slow» и «Fast». Они отличаются, примерно, как обычный и спортивный режимы в автомобиле. В режиме «Slow» квадрик движется плавно, дает меньшие крены, скорость поворта вокруг оси меньше, а радиус разворота больше :), на перемещение виртуальных движков реагирует с некоторой задержкой и «ленцой», то есть это режим для спокойного полета или для обучения. НО все меняется при переключении в режим «Fast», ободки джойстиков на экране смартфона становятся синими, а квадрик «просыпается»…
… реакция на управляющие команды, практически, мгновенная, скорость и доступные крены увеличиваются и начинаешь получать огромное удовольствие от управления. Кроме того, в этом режиме, изменяется реакция дрона: если отпускаешь оба виртуальных джойстика, машинка, как будто, «бьет по тормозам», стараясь моментально остановиться и неподвижно зависнуть. Практически, отсутствует инерция, как в обычных квадриках, когда ты отпускаешь джойстик, а дрон еще метр-два по инерции движется в туже сторону, тут квадрик «притормаживает двигателями». Естественно, в скоростном режиме гораздо лучше летать либо в большом помещении, либо на улице.

В процессе полета на дисплее отображается заряд батареи, уровень WiFi и даже телеметрия в виде скорости и высоты полета (правда высота отсчитывается от начальной высоты взлета, поэтому может быть и отрицательной :)


Помимо ручного управления в квадрике есть 6 «автоматических» программ:

1. 8D-трюки. В этом режиме на дисплее смартфона выделяется квадратная зона, по которой, смахнув пальцем с одного ее конца на другую, квадрик совершает переворот в заданном направлении: вперед-назад, влево-вправо и по любой из диагоналей туда и обратно. Выглядит очень забавно.
2. Самолетик. Используется при старте квадрика, в этом режиме, держа его на ладони просто подбрасываем его и он не падает, а взлетает.
3. Круг. Это режим для «себяшечек», встал в центр и дрон тебя снимает, кружась вокруг (режима следования за объектом в движении тут нет).

Впечатления от полета
Полеты даже мне, здоровому мужику, именно на данном дроне, доставили большое удовольствие. В общей сложности налетал около 3 часов. Управление со смарта вполне удобное. По-началу, естественно, в помещении, привыкал к рулежке и не слабо побился об стены, но квадрик это прощает, имея действительно прочный корпус и реально сглаживая огрехи управления. В режиме «Fast» очень чувствителен к управляющим командам, можно точно лететь туда куда нужно и под конец уже не боялся летать даже над речкой. При потере ориентации (где перед, где зад), особенно на дальнем расстоянии, можно просто отпустить «виртуальные стики» и квадрик будет висеть на месте не двигаясь с него и поддерживая высоту.

Что касается высоты и дальности полета: программное ограничение высоты 10м, а дальности — 100м. Не каждый смарт по WiFi управлению до этого добивает, но «отпускал» кроху достаточно далеко и высоко, дальше было просто стремно — его уже не видно:

Кроме этого, без проблем можно работать через Сяомишный WiFi свисток-репитер, подключенный к повербанку, усиливая сигнал от квадрика.
Камера и видео
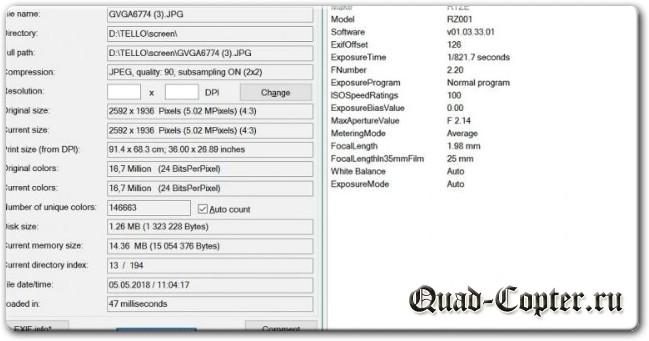
Камера всего 720P, но не самая плохая и, при хорошем освещении, получаются нормальные фотки (2592x1936) и видео (1280x720), можно предполжить, что либо железа на 1080 миниатюрного не нашли, либо в бюджет цены не вписывались с ним.
Со стабилизацией видео все очень средненько. Видео хорошо получается если запускать дрон в автоматическом режиме, типа панорамы или облета по кругу, когда он движется плавно, или, если постараться, плавно летать в режиме «slow», а вот в фаст-режиме, все сильно дергается. В Tello нет никаких носителей информации, куда бы можно было писать видео и фото, все идет по WiFi сразу в смартфон. Кроме этого, судя по всему, в зависимости от качества приема автоматически меняется битрейт, поэтому на высокой скорости, качество видео хуже, да и встроенное ПО, похоже, тоже пытаясь улучшить видео, делает его еще хуже :)
Дальность уверенной передачи картинки не превышает 10м, даже летая по квартире и залетая в соседнюю комнату, картинки уже нет, однако, канал управления работает гораздо дальше. В общем, видео можно писать с дрона на весьма ограниченной дистанции. Микрофона в квадрике (как и во всех DJI дронах) нет.





Быстрый полет:
Tello EDU — вторая версия программируемого беспилотника вышедшая следом за популярным Tello. В отличии от первой версии, программирование EDU возможно на одном из трёх доступных языков, таких как Scratch, Swift и Python (для первой версии доступен только — Scratch). В арсенале дрона обновленный SDK 2.0 с более продвинутыми командами и расширенным интерфейсом данных, позволяющий пользователю без особого труда написать код, чтобы дать команду нескольким Tello EDU летать в организованной группе, а также разрабатывать удивительные функции ИИ. Программирование никогда ещё не было таким увлекательным!
Особенности
- 14-ядерный процессор Intel
- Поддерживает программирование на Scratch, Swift и Python
- Drone Swarm (программируемый синхронный полёт до четырёх Tello EDU)
- Обновленный SDK 2.0
- Mission Pads (метки для расширения возможностей программирования)
- Система управления полётом от DJI
- Визуальное позиционирования (2 × ультразвуковых + 1 × оптический сенсоры)
- Система избегания препятствий (опционально)
- Автовзлёт и посадка
- Удержание высоты
- Взлёт и посадка с рук
- 5 × запрограммированных режимов полёта
- Запись короткометражных видеороликов (для режимов полёта Circle, 360 и Up & Away)
- Исполнение флипов по 8 направлениям
- Защита при потере связи (осуществляет автопосадку)
- Макс. время полёта 13 мин
- Расстояние FPV удаления 100 метров
- 2 × антенны для более стабильной видеотрансляции
- FPV трансляция в HD качестве
- Съёмка видео в качестве 720p
- Съёмка 5Мп фото
- Электронная стабилизация изображения (EIS)
- Управление посредством смартфона либо планшета через мобильное приложение, либо в тандеме с дополнительно докупаемой аппаратурой управления GameSir T1d Controller
- Адаптирован под сопряжение с VR-гарнитурой и геймпадами Gamesir и Apple MFi Bluetooth
- Вес 87 грамм

Комплектация
- Дрон Tello EDU
- Аккумулятор
- 4 × несущих винта (2CW/2CCW)
- 4 × запасных несущих винта (2CW/2CCW)
- Защита несущих винтов
- Micro USB кабель
- Ключ для снятия несущих винтов
- 4 × Mission Pad

Спецификация
Range Finder/Барометр/LED подсветка/Система видения/WiFi 802.11n 2.4G/FPV 720P Макс. скорость горизонтального полёта:Камера
Внешний вид





Программирование
Tello EDU можно программировать с помощью языков Scratch, Swift и Python. Он построен на новом SDK 2.0 с большим количеством команд и расширенным интерфейсом данных. С помощью программирования можно задавать беспилотнику исполнение последовательных действий по заранее выставленному алгоритму, а также реализовать возможность распознавание объектов и многое другое.
Язык программирования Swift имеет интересную учебную программу под названием «Tello Space Travel», где начинающие программисты могут изучать кодирование посредством интерактивных уроков в виде интересной сюжетной линии используя iPad.
Drone Swarm
Используя программный код и контрольные метки «Mission Pad» пользователь может реализовать синхронный полёт (до четырёх Tello EDU единовременно) сопряжённый с различными акробатическими фигурами пилотажа.
Mission Pads

Mission Pads — контрольные метки, служат для более точного выполнения запрограммированных задач и расширения возможностей программирования. Пользователь может запрограммировать конкретную информацию для каждой метки в отдельности, позволяя тем самым беспилотнику распознавать каждую из них и выполнять заданные для каждой метки миссии, например, исполнение различных фигур пилотажа.
Возможности ИИ

Tello EDU предоставляет пользователю полный доступ к данным видеопотока, создавая тем самым больше возможностей для обработки изображений и разработки ИИ. Новый SDK 2.0 позволяет дальше совершенствовать дрон, реализуя больше функций ИИ, таких как распознавание объектов, отслеживание, трёхмерная реконструкция посредством программирования, компьютерное зрение и технологий глубокого обучения.

Tello EDU реализуется через официальные источники разработчиков в единственной комплектации за 129$.
Доп. аксессуары:
Вывод
Плюсы
- Дизайн/Качество
- Управляемость (даже с помощью смартфона)
- Динамичность
- Функциональность (новые языки программирования, Drone Swarm, Mission Pads)
- Обновленный SDK 2.0
- Камера (качество съёмки)
- Время полёта
- Готов к FPV полёту и программированию из коробки
- Цена
Минусы
- Коллекторные моторы
- Нет внешнего накопителя (записанный материал сохраняется на ресурсах сопряжённого смартфона)
- Некоторые функции приложения Tello EDU платные
- Swift Playgrounds доступен только на IOS
Лучшее на сегодняшний день беспилотное предложение с акцентом на программирование. Потенциал дрона в полной мере оценят юные пользователи желающие не только быстро научиться управлять БЛА, но и освоить азы программирования в максимально доступной и увлекательной форме.
В. Каковы основные различия между Tello EDU и Tello?
О. В арсенале Tello EDU все те же функции и возможности, что и у Tello, плюс доработанный SDK 2.0, контрольные метки Mission Pad, и единовременный синхронный полёт Drone Swarm.
В. Как я могу управлять Tello EDU?
О. Вы можете управлять Tello EDU с помощью смартфона/планшета (IOS или Android), а также в комбинации с аппаратурой управления GameSir T1d Controller (докупается отдельно).
В. Что интересного может выполнять дрон во время полёта?
О. Tello EDU может выполнять восемь различных переворотов, взлетать с руки и садиться в режиме «Bounce», а также автоматически записывать короткие видеоролики с помощью EZ Shots.
В. Может ли Tello EDU летать в помещении?
О. Да, Tello EDU может безопасно летать как в помещении, так и на улице. Запуск на улице рекомендуется осуществлять в безветренную погоду.
В. Является ли Tello EDU водонепроницаемым?
О. Нет.

Камера
В. Какими функциями обладает камера дрона?
О. Камера Tello EDU способна снимать 5Мп фотографии и записывать видео в HD качестве. Функция EZ Shots позволяет дрону исполнять полёт по заданным схемам и записывать короткие видеоролики.
В. Где сохраняется полученный фото и видео материал? И как я могу его экспортировать?
О. Фотографии и видео сохраняются на сопряжённом с дроном смартфоне/планшете. Вы можете экспортировать файлы со смартфона по мере необходимости.
В. Поддерживает ли дрон установку SD-карт?
О. Нет.
В. Каково макс. расстояние передачи видеопотока?
О. Макс. дальность полёта составляет приблизительно 100м, но это расстояние может варьироваться в зависимости от присутствующих помех в месте запуска дрона.
В. Как я могу заряжать АКБ дрона?
О. Вы можете заряжать аккумулятор не вынимая его из дрона с помощью идущего в комплекте micro USB кабеля, либо одновременно заряжать до трех АКБ с помощью ЗУ (докупается отдельно).
В. Поддерживает ли дрон горячую замену АКБ?
О. Нет. Если это сделать, то есть вероятность утратить записанный в последнем полёте фото и видео материал.
Пропеллеры
В. Как осуществляется замена несущих винтов дрона?
О. Смена пропеллеров осуществляется в ручную, без каких либо инструментов. Но, на всякий случай в комплекте идёт специальный ключ для их съёма.
В. Как я могу отличить несущие винты CW от CCW? И как правильно их установить?
О. На CW пропеллерах и моторах есть специальные метки (выемки), которые должны обязательно совпадать. На CCW пропеллерах и моторах таких меток нет.

Обновление
В. Как я могу обновить прошивку дрона?
О. Через мобильное приложение.
В. Что делать если во время обновления произошел сбой?
О. Если обновление не удалось, просто заново подключите Tello EDU к мобильному приложению и запустите процесс обновление заново.
В. Возможно ли обновить ПО дрона с помощью компьютера?
О. Нет.
Аксессуары
В. Какие Bluetooth контроллеры совместимы с Tello EDU?
О. В настоящее время дрон совместим с аппаратурой управления Gamesir T1D.
В. Какие программные платформы я могу использовать для программирования Tello EDU?
О. В настоящее время Tello поддерживает программирование посредством Scratch, Swift Playgrounds и Python. В будущем будет доступно больше программных платформ.
Мобильное приложение Tello EDU

В. Возможно ли одновременное использование мобильных приложений Tello и Tello EDU?
О. Нет. Мобильное приложение Tello предназначено для реализации динамичных FPV полётов и аэросъёмки, а приложение Tello EDU ориентировано на программирование. Несмотря на то, что с беспилотником совместимы оба приложения, одно из них должно быть полностью отключено перед использованием другого, а сам дрон перезагружен.
В. Является ли мобильное приложение Tello EDU полностью бесплатным?
О. Несмотря на то, что большинство функций приложения являются бесплатными, некоторые игры всё же включают в себя уровни требующие оплаты.
Swift Playgrounds

Mission Pad
В. Как я могу использовать метки Mission Pad?
О. Пожалуйста ознакомьтесь с руководством пользователя Tello Mission Pad, чтобы узнать как использовать контрольные метки.
В. Каково макс. количество беспилотников Tello EDU я могу контролировать в одном синхронном полёте?
О. Вы можете контролировать до 4 дронов в одном полёте, используя приложение Swift Playgrounds.
Видео
Видео с дроном Tello EDU.
Обучение блочному программированию через приложение Tello EDU.
Пример программирования на Python.
Занятие посвящено получению первичных навыков программирования квадрокоптеров DJI Tello в среде Scratch.
Методическая разработка будет полезна педагогам дополнительного образования и учителям, использующим на занятиях квадрокоптеры DJI Tello. Как показал опыт, многие даже не догадываются о том, что эти квадрокоптеры можно программировать. А среди тех, кто знает о такой возможности – не все разобрались как это сделать. У меня никак не получалось сопряжение квадрокоптеров с редактором Scratch и лишь затратив довольно много времени на изучение англоязычных форумов посвящённых этой теме удалось понять все «тонкие места», своим опытом хочу поделиться со всеми интересующимися данной темой.
| Вложение | Размер |
|---|---|
| mayskaya_gimnaziya_kryuchkov_i.m.docx | 711.41 КБ |
Предварительный просмотр:
Методические разработки учебных занятий для обучающихся технической направленности

Занятие посвящено получению первичных навыков программирования квадрокоптеров DJI Tello в среде Scratch.
Методическая разработка будет полезна педагогам дополнительного образования и учителям, использующим на занятиях квадрокоптеры DJI Tello. Как показал опыт, многие даже не догадываются о том, что эти квадрокоптеры можно программировать. А среди тех, кто знает о такой возможности – не все разобрались как это сделать. У меня никак не получалось сопряжение квадрокоптеров с редактором Scratch и лишь затратив довольно много времени на изучение англоязычных форумов посвящённых этой теме удалось понять все «тонкие места», своим опытом хочу поделиться со всеми интересующимися данной темой.
Тип занятия : изучение и первичное закрепление новых знаний.
Форма занятия : комбинированная.
Предметная : написать первую программу для квадрокоптера.
Методологическая : воспитание информационной культуры учащихся, развитие внимательности, логического мышления, развитие навыков коллективной работы и взаимопомощи.
Метапредметная : практическое применение программирования, развитие пространственного мышления
Методы обучения : объяснительно-иллюстративный, наглядный, частично-поисковый, исследовательский.
Учащиеся должны знать/понимать :
• назначение основных блоков программы в Scratch;
• комбинирование стандартных и специальных блоков;
• меры безопасности при работе с оборудованием.
Учащиеся должны уметь :
• подключить квадрокоптер к ноутбуку по Wi-Fi;
• запустить квадрокоптер согласно полётному заданию;
• выделять путь решения в зависимости от поставленной задачи.
Оборудование : квадрокоптер DJI Tello, ноутбук.
Используемые ЦОР : конспект занятия, презентация.
Перед началом занятия необходимо провести подготовительные мероприятия – установить и настроить программное обеспечение на ноутбуки обучающихся.
- Организационный момент. Актуализация знаний (2 мин).
- Теоретическая часть (8 мин).
- Практическая часть (25 мин).
- Вопросы учеников. Подведение итогов урока (3 мин).
- Рефлексия (2 мин).
Здравствуйте, ребята. Сегодня мы с вами продолжим работу с квадрокоптерами DJI Tello. На предыдущих занятиях мы учились непосредственному пилотированию этих квадрокоптеров. Сегодня мы попробуем писать программу, которая будет управлять нашим беспилотным летательным аппаратом в соответствии с полётным заданием.
Запустите на своих ноутбуках редактор Scratch 2.0. Вы уже ранее работали в новой версии этого редактора, отличия в интерфейсе есть, но они незначительные.
Примечание для педагога: запустите презентацию на большом экране.

Перейдите в папку C:\Tello и запустите файл Tello.s2e.
Как видите во вкладке другие блоки появились блоки для управления квадрокоптером.

Все блоки подписаны на английском, но в них нетрудно разобраться.
Take off – взлёт. Land -посадка. Следующие блоки задают полёт или поворот в указанном направлении, примените свои знания, полученные на уроках английского языка, и переведите названия блоков.

Обратите внимание на красный индикатор – он показывает, что пока система не готова к работе, нужно соединить редактор Scratch со средой Node которая будет пересылать команды нашему квадрокоптеру.
В строке поиска набираем латинскими буквами «cmd» - и вызываем командную строку. Далее, набираем команду cd c:\Tello.
Примечание для педагога: CD – это команда изменения директории (перехода к новой папке), а дальше адрес папки, в которую были скопированы файлы на подготовительном этапе.
После того, как появится строка c:\Tello набираем команду node tello.js
На экране должна появиться вот такая строка

И во вкладке дополнительные блоки индикатор должен поменять цвет с красного на зелёный – почти всё готово, программу уже можно писать.
Напишем первую простую программу для нашего квадрокоптера, а точнее сразу две – основную и аварийную.
Основная программу будет такой:
1.Когда нажат зелёный флажок – взлететь (по этой команде квадрокоптер взлетает на высоту примерно 80 см.
2. Подняться на 100 см вверх (все измерения в этих блоках даны в сантиметрах).
3. Сделать флип (кувырок). Аргумент «f» у команды флип определяет, что кувырок будет сделан вперёд.

Обратите внимание – между всеми командами вставлена команда «ждать» с аргументом «8 секунд». Её приходится вставлять так как опытным путём мы установили, что иначе квадрокоптер не успевает спозиционироваться в новой точке и пропускает команды.
Обратите внимание, что рядом с основной имеется аварийная программа, которую желательно создавать всегда. Она очень простая – когда нажата клавиша «пробел» – приземлиться. Эта программа требуется на случай, если что-то пойдёт не так.
Теперь попробуем запустить наш коптер на выполнение программы.
Установим в него аккумулятор, включим и разместим на ровную поверхность. На занятиях по пилотированию вы уже узнали, что коптер очень плохо летает в слабоосвещённых помещениях, а также на тёмным или зеркальным напольным покрытием. Это связано с тем, квадрокоптер позиционируется по сигналу отражённом от пола и над такими типами напольной плитки летает плохо, его ведёт в сторону. При запуске по программе над такими покрытиями он не будет летать вовсе. Поэтому выбирает хорошо освещённые помещения со светлым матовым покрытием пола.
Подключимся к нашему квадрокоптеру по Wi-Fi

Как видите на поверхности квадрокоптера написаны две буквы или две цифры – это последние два символа его имени в сети Wi-Fi.
Выберите нужный и подключитесь. Как только вы увидите надпись «подключено» - запускайте программу на исполнение. Если разместить рядом с окном редактора Scratch окно консоли – можно в реальном времени наблюдать прохождение по сети исполняемых команд и заметить если какие-то команды пропущены.
Квадрокоптер взлетел, после паузы набрал высоту, выполнил флип и приземлился. Поэкспериментируйте с длительностью пауз в программе – возможно для ваших квадрокоптеров и ваших условий полёта паузы можно будет сократить или убрать вовсе. Если квадрокоптер пропускает какую-то команду – значит пауза слишком мала, он не успел провести позиционирование в пространстве.
Простейшую программу испытали – попробуем немного сложнее.
Задание: Квадрокоптер должен взлететь, подняться вверх на 100 см. Далее пролететь вперёд на 200 см, повернуться влево, ещё вперёд на 200 см, опять повернуться влево. И так последовательно прилететь в исходную точку.
Вам даётся 5 минут на написание программы.
Примечание для педагога. Желательно этот полёт провести вокруг какого-либо препятствия, например колонны в рекреации.
Обязательно проверяйте какую высоту дети указали в строке набор высоты, неверные значения могут привести к столкновению с потолком, что значительно опаснее для квадрокоптера нежели столкновение со стеной.
Проверим какие программы у вас получились.
Примечание для педагога. Возможны два пути решения этого задания – последовательное выполнение команд или цикл. Обратите внимание на тех детей, кто додумался до второго способа решения и отметьте их.
Обязательно создавайте аварийную программу. Квадрокоптер может просто зависнуть в воздухе в случае неправильного кода и висеть до разряда батарей. Его, конечно, можно аккуратно поймать снизу за корпус, но только в случае, если он завис на досягаемой высоте.
Вот один из вариантов решения задачи.

Примечание для педагога: Опытным путём мы установили, что команда лететь вперёд выполняется только на дистанцию менее 600 см.
На следующих занятиях мы попробуем написать программы для полётов по более сложным траекториям.
Ответы на вопросы учащихся. Подведение итогов.
Педагог ДО: Ребята, скажите, пожалуйста, своё мнение о нашем занятии, дополнив понравившиеся вам данные фразы своими мыслями. Оцените свою работу во время занятия.

Не так давно китайский стартап Ryze Technology, при поддержке таких именитых компаний как DJI (признанный лидер в производстве квадрокоптеров различного уровня) и Intel, выпустил очень интересный квадрокоптер под названием Tello. Предлагаю взглянуть на эту зверушку под катом.
По заявлению производителей, которые хоть и позиционируют его, как квадрик бюджетного уровня доступный всем (а это и правда выглядит так, если взглянуть на цены других квадров от DJI), в нем присутствуют такие серьезные вещи как: 14-ядерный процессор от Intel, система визуального позиционирования, куча сенсоров и гироскопов, а также специально разработанное ПО, оценивающее ситуацию в которой квадрик находится, для обеспечения стабильного и качественного полета. Те же люди заверяют, что летать на нем может любой: хоть ребенок, хоть взрослый, настолько управление интуитивно понятно. Вот тут как раз такой и попался — я ни разу не профессиональный водитель автобуса летун, более того, всегда причислял себя к тем, кто «рожденный ползать, летать не может», хотя регулярно совершаю попытки сам же это и опровергнуть (в кладовке валяются Parrot Ar.Drone 2 и 3-4 штуки других летательных аппаратов). Кроме этого, фишкой дрона является возможность его программирования с помощью простого объектного языка Scratch (специально сделан акцент на простоту освоения детьми) и наличие SDK. Забегая вперед скажу, что слово «программирование» в текущей реализации — это слишком громко сказано…
Итак начнем, как обычно, с упаковки.
Внутри:
Комплетация:
— квадрик,
— аккумулятор,
— 4 винта (в дополнение к установленным),
— съемник для винтов,
— бумажка
Характеристики квадрокоптера:
Характеристики полета:
Максимальная дистанция полета:100 метров
Максимальная скорость: 8 м/с (28 км/ч)
Макс. продолжительность полета: 13 минут
Макс. высота полета:10 метров
Вес (без аккума):
Инструкция на Tello в pdf с офф.сайта.
Первое что меня удивило, это его размер — он маленький!
Рассмотрим со всех сторон:
Рама квадрика с кучей ребер жесткости, выполнена из прочного легкого пластика и, как оказалось, она просто неубиваемая.
Винты на Tello не одинаковые и взаимозаменяемы только попарно, по диагонали. На одной паре есть риски на пропеллерах, на другой — нет:
Защита на винтах съемная, выполнена из упругого пластика, но лучше ее не снимать, т, к. движки на этой крохе весьма мощные, я как-то, случайно, коснулся их пальцем во время работы — было больно (на других мелких квадиках, таких острых ощущений никогда при касании не было).
С нижней стороны видны щели обдува (т.к. мощному процессору требуется хорошее охлаждение), датчики и камера системы позиционирования…
… которая называется Vision Positioning System. При работе сквозь линзы заметно красноватое свечение:
На «мордочке» камера HD720P30 и многоцветный светодиод состояния, который светит различными цветами и мигает с разной интенсивностью, в зависимости от состояния квадрика:
Индикация светодиода в зависимости от ситуации:
Снизу резиновые посадочные ножки, в задние встроены антенны:
Аккумулятор LI-Po 1100mAh, напряжение 3.8V:
Почти полностью занимает внутренности квадрика :)
Заряжается аккумулятор, установленным в квадрик, через его microUSB разъем, установленный на боковой стороне. Включается аппаратец кнопкой на противоположной от разъема стороне:
Заряжаем аккумулятор и взлетаем…
Кстати аккумулятор честный (было бы странно, если бы было по-другому):
Полеты

Если к Tello в полете поднести руку снизу, он будет от нее отлетать вверх:
В приложении можно выбрать два режима управления «Slow» и «Fast». Они отличаются, примерно, как обычный и спортивный режимы в автомобиле. В режиме «Slow» квадрик движется плавно, дает меньшие крены, скорость поворта вокруг оси меньше, а радиус разворота больше :), на перемещение виртуальных движков реагирует с некоторой задержкой и «ленцой», то есть это режим для спокойного полета или для обучения. НО все меняется при переключении в режим «Fast», ободки джойстиков на экране смартфона становятся синими, а квадрик «просыпается»…
… реакция на управляющие команды, практически, мгновенная, скорость и доступные крены увеличиваются и начинаешь получать огромное удовольствие от управления. Кроме того, в этом режиме, изменяется реакция дрона: если отпускаешь оба виртуальных джойстика, машинка, как будто, «бьет по тормозам», стараясь моментально остановиться и неподвижно зависнуть. Практически, отсутствует инерция, как в обычных квадриках, когда ты отпускаешь джойстик, а дрон еще метр-два по инерции движется в туже сторону, тут квадрик «притормаживает двигателями». Естественно, в скоростном режиме гораздо лучше летать либо в большом помещении, либо на улице.
В процессе полета на дисплее отображается заряд батареи, уровень WiFi и даже телеметрия в виде скорости и высоты полета (правда высота отсчитывается от начальной высоты взлета, поэтому может быть и отрицательной :)
Помимо ручного управления в квадрике есть 6 «автоматических» программ:
1. 8D-трюки. В этом режиме на дисплее смартфона выделяется квадратная зона, по которой, смахнув пальцем с одного ее конца на другую, квадрик совершает переворот в заданном направлении: вперед-назад, влево-вправо и по любой из диагоналей туда и обратно. Выглядит очень забавно.
Впечатления от полета
Полеты даже мне, здоровому мужику, именно на данном дроне, доставили большое удовольствие. В общей сложности налетал около 3 часов. Управление со смарта вполне удобное. По-началу, естественно, в помещении, привыкал к рулежке и не слабо побился об стены, но квадрик это прощает, имея действительно прочный корпус и реально сглаживая огрехи управления. В режиме «Fast» очень чувствителен к управляющим командам, можно точно лететь туда куда нужно и под конец уже не боялся летать даже над речкой. При потере ориентации (где перед, где зад), особенно на дальнем расстоянии, можно просто отпустить «виртуальные стики» и квадрик будет висеть на месте не двигаясь с него и поддерживая высоту.Что касается высоты и дальности полета: программное ограничение высоты 10м, а дальности — 100м. Не каждый смарт по WiFi управлению до этого добивает, но «отпускал» кроху достаточно далеко и высоко, дальше было просто стремно — его уже не видно:
Кроме этого, без проблем можно работать через Сяомишный WiFi свисток-репитер, подключенный к повербанку, усиливая сигнал от квадрика.
Камера и видео
Камера всего 720P, но не самая плохая и, при хорошем освещении, получаются нормальные фотки (2592x1936) и видео (1280x720), можно предполжить, что либо железа на 1080 миниатюрного не нашли, либо в бюджет цены не вписывались с ним.
Со стабилизацией видео все очень средненько. Видео хорошо получается если запускать дрон в автоматическом режиме, типа панорамы или облета по кругу, когда он движется плавно, или, если постараться, плавно летать в режиме «slow», а вот в фаст-режиме, все сильно дергается. В Tello нет никаких носителей информации, куда бы можно было писать видео и фото, все идет по WiFi сразу в смартфон. Кроме этого, судя по всему, в зависимости от качества приема автоматически меняется битрейт, поэтому на высокой скорости, качество видео хуже, да и встроенное ПО, похоже, тоже пытаясь улучшить видео, делает его еще хуже :)
Дальность уверенной передачи картинки не превышает 10м, даже летая по квартире и залетая в соседнюю комнату, картинки уже нет, однако, канал управления работает гораздо дальше. В общем, видео можно писать с дрона на весьма ограниченной дистанции. Микрофона в квадрике (как и во всех DJI дронах) нет.
Читайте также: