
Драйвер двигателя ta6586 чем заменить
Информация по замене радиоэлектронных компонентов на аналоги. Информация пополняется. Если есть, что добавить,добавляйте.
Аналоги шим контроллеров
DH321 = DL0165= DM0265=
DM0365=DM311=DM100
NCP1014AP10 => TNY268P= TNY 267P= TNY266 (отличается частота) сильно свистит в дежурном режиме. Предполагаю, что из-за отличия в частотах. У NCP1014AP10 - 100Кгц, TNY268P - 132Кгц.
КА5М0365RN= KА5М02659R DIP8
STR-A6259H= STR-A6252 (имеют разную рабочую частоту)
вместо NCP1014AP10 так же нормально работает TNY266
ICE 3B3065P= ICE2A765P
P1014AP10 = TNY266. 268
LD7575 = NCP1203D60 = NCP1377
L6561 = L6562 = TDA4863
проверено работает без переделок
THX203X =PD223
3844 dip =FA13844
FSCM0765R(6-ти ногая) успешно заменена без переделок на 5-ти ногую KA5Q0765RT
NY275PN был заменён на TNY176PN без переделок
MIP2C1 заменена на DMO465. Ввиду разных корпусов стыковка производилась проводом МГТФ. Работает прекрасно.Аппарат - домашний кинотеатр SONY,блок питания дежурного режима.
DVD SAMSUNG K-100 вместо KA5M0365RN поставил 5L0380R в штатное место DIP-8 соотв. выгнув "ноги".Переделки схемы не понадобились
MIP0255 заменил на TNY268 без доработок
STRW6251 = STRW6253 = STRW6053
EM311 меняется на FSDL0265R. Без доработок
STRS5706 поставил STRS5707 без переделок
STRG5653 в блоке питания на STRG8656 без переделок.
clarion2 писал:
Решил отписать что сделал. Вместо MR4710 9 ножек устанавливал КA2S0880 5 ножек
1 на 9 MR4710
2 на 3 MR4710
3 на 4 MR4710
4 на 2 MR4710
5 припаевается к дополнительно установленому конденсатору +1мкФ/100В вторая нога конденсатора на GND.
Дополнительно навешивается резистор 240к 0,25 вт с 7 ноги MR4710 на 3 ножку КA2S0880(4нога MR4710).
Информация по замене радиоэлектронных компонентов на аналоги. Информация пополняется. Если есть, что добавить,добавляйте.
ICE3DS01L (DIP- на LD7575 PS (SOP-
шасси МС-19А заменил STR-F6654 на STR-W6754 ,удалил родную обвязку на место родной с доработкой припаял новую.
SQD2011K заменил на STRW6253
ложиться великолепно по выводам и переделывать схему вообще не надо, единственная добавленная
деталь это конденсатор с 7 ноги на корпус 47nf , на фото всё видно , работает без проблем
S3310 = NCP1200 без переделок 1:1 менял на питателе BN44-00605A в "самсунге" UE320F5500AK
NE1101B на LD7575, разведенного на плате резистора на 1-й ноге не было, поставил 100кОм.
В тв. приставке DVBT2 SUPRA SDT-99 ИМС ШИМ в ИИП LY2117 (DIP8) - ничего по ней не нашел, заменил на SW2604 - с ее подключением по даташиту и переворотом "пузом" вверх (для удобства пайки, не "pin to pin") - все детали, кроме 2 резисторов, остались штатные.
LD7523GS заменил на LD7522PS без переделки, надо только запаять с 3 ногу 100к на массу.
Замена LD7536R на LD7537R .
Добавил делитель из резисторов 3 х 560кОм от входа моста (переменное напряжение 220 В) и R - 100кОм (на землю) согласно даташита к 3 пин..
Заменил 3S111 на 1S311 в самсунге UE28F4000AW.
Единственное уменьшил датчик тока, напояв паралельно 1.0Ом на стояший 0.27Ом. На большой громкости срабатывала защита.
5AARZX(NCP1251) меняется на OB2273 - нужно поднять 3 пин
Заменил шестипиновую FSQ0765R на пятипиновую FSCQ0765RT - пятый пин через резистор 3 кОм на GND , 3-й пин - перемычкой на отсутствующий 6-й, RM803 - 804 заменил на 2 по 470 кОм.
Вместо SG6742 в основном БП LCD Toshiba 32KL934 поставил FAN6747 с добавлением цепи Brownout (HV) согласно даташиту.
Вместо ICE3BS03LJ установил - ICE3BS02G, с увеличением керамического конденсатора по её 1-му пину до 0,22 мкФ.
MAP8800 на FAN6961 , единственная доработка - добавить резистор 22 kOm с 3-pin на "землю"
SA0565 идеально меняется на KA5M0365R и его прямые аналоги в корпусе DIP-8. Для этого следует подогнуть "под себя" 1-й вывод м/сх и правильно положить припой. См. даташит на KA5M0365R.
ШИМ 3BR1765JZ успешно заменил на 5L0380R.
Схема замены 5L0380R 1pin=8pin 3BR1765JZ
5L0380R 2pin=5pin 3BR1765JZ
5L0380R 3pin=7pin 3BR1765JZ
5L0380R 4pin=2pin 3BR1765JZ
Вторую ногу 5L0380R через 240ком вешаем на +310в.
MIP3E3 в корпусе DIP8 (без 6-го пина) заменил на TOP224Y в корпусе TO220 только выводы перепиновал.
NCP1337 заменил на LD7575 с пределкой на 1 ноге и подключением оптопары по 2 ноге.
ШИМ LD7552bps.
Удачно заменил его на SG6841 с небольшой доработкой: на ld7552bps с 4 вывода на "землю" стоял резистор 100 кОм - заменил его на 24 кОм. По питанию на 3 вывод поставил два резистора по 1 МОм вместо двух по 500 кОм.
БП LCD шимку прекондея FA5501 менял на TDA4863 элементы коррекции по выводам 1 и 2 пришлось поменять чтобы не верещал: емкости и резистор брал с донора вместе с микрухой.
STR-A6069 стоит в дежурке БП ЖК ТВ Toshiba 32AV607PR, заменил на STR A6259 единственная доработка: отрезал дорожку ,идущую на 2 ножку через резисторы на + диодного моста ,работает без проблем
TEA1530 можно заменить на TEA1507. Режем дорожки к 3 и 4 ноге. К выводу 3 подтягиваем дорожку CTRL, которая ранее шла на вывод 4. Ногу 4 сажаем на землю.
FSGM0765R применяется в LED телевизоре Samsung UE22D5003BW заменил на более распространенную FSCM0765R. Посадил 6 вывод FSCM0765R через сопротивление в 5 кОм на землю и подтянул на 3вывод сопротивление в 1 МОм на плюс к сетевой емкости (+300 В). БП запустился без проблем.
Информация по замене радиоэлектронных компонентов на аналоги. Информация пополняется. Если есть, что добавить,добавляйте.
Микросхема КР 1051ХА11 меняется на TDA 5030A.
В блоке СК-В-001С .
8821-CPNG4NC8 меняется на 8821-CPNG5DD2, при этом после замены и включении телевизора в начале происходит автоматическая инициализация памяти.
Для правильной работы кнопки Vol– телевизора необходимо уменьшить номинал резистора к кнопке Vol– с 15k до 12k. Теперь можно зайти в сервис и установить в 3-м меню значение опции OPT на E7 и SET на 00.
Выводы 56 и 61 процессора необходимо поменять местами.
LC863328A 5W63 меняется на LC863328B 52E5, Каких либо доработок, смены прошивки, пульта не требуется. (Заменено в Avest 54ТЦ-01)
Инфа взята с прайса поставок Телебалта.
I.C. LC863324-52C9=LC863320-5N94=LC863328B-53J5
I.C. LC863328C-56C9 = LC863328A-5W63
I.C. LC863332B-53W3 =LC863328B-52E5
I.C. TDA9381 2NS = I.C. TDA9381 C32NG
I.C. TDA9381PS/N2/1I1278 =TDA9381PS/N3/1/1752
I.C. TDA9381PS/N2/2I1318 = NTDA9381 C38N_PD
Rubin Rolsen
NTDA9381/IC39NB -- TDA9381PS/N3/2/1831
TDA9365ATX V1.8C -- TDA9365PC/N3/5
TDA9381PS/N2/1/1521 -- TDA9381/N3/1/1730
TDA9381PS/N2/2/2I1273 -- TDA9381PS/N2/1373
TDA9381PS/N3/1/0836 ---1156 -- 1720-- 1729
TDA9381SP/N2/2I1091-- CH05T0102 AVEST 54ТЦ-04
CH05T0101, CH05T0102-- (TDA9381PS/N2/1I0817),
CH05T0103, CH05T0106,-- CH05T0108 (TDA9381PS/N2/2I1091),
CH05T0109, CH05T0110 --(TDA9381PS/N3/3/1663),
Horizont
TDA9351PS/N2/1I0761
TDA9351PS/N2/1I0981
TDA9351PS/N2/1I1284
TDA9351PS/N3/2/1608
TDA9351PS/N3/2/1855
TDA9381PS/N2/1I0729
TDA9381PS/N2/1I0840
TDA9381PS/N2/1I1277
TDA9381PS/N3/1/1803
TDA9381PS/N3/1/1895
TDA9381PS/N3/2/1612
TDA9351PS/N2/1I0981
TDA9351PS/N3/1/1764
TDA9381PS/N2/1I0980
TDA9381PS/N2/1I1278
TDA9381PS/N3/1/1752
TDA9381PS/N3/1I1611 все взаимозаменяемые.
У самсунгов все процы TDA9351 (SPM-802xxx - для СНГ региона MTV-xxxx - арабы, европа (CW телики)) взаимозаменяемые.
EEN - без телелекста EE - с телетекстом.
Так же EEN/EE лихо меняются на MTV и обратно, только в MTV может отсуствовать русский язык.
Версия проца роялей не играет. Можно спокойно проц первой версии заменить на проц шестой версии, обратная замена тоже канает.
После замены я всегда ставлю чистую память, и если в телеке по мимо главного проца есть звуковой проц (обычно MSP4100xx от блевотной фирмы micronas) то при включении с чистой памятью главный проц его найдёт.
Так же зваимозаменяемые процы GREEN1 и GREEN2.
TCL-A19V03-TO/8821CPNG4U88 аналог TCL-A30V02-TO/8821CRNG5JB2
Заменён в Avest 54ТЦ-03 без каких либо дополнительных телодвижений.
Судя по мануалу на Avest, скорее всего меняется и на TCL-A19V01-TO/8821CPNG4GD9 (не проверено)
TCL-A19V03-TO/8821CPNG4U88 = TCL-A30V02-TO/8821CRNG5JB2 = TCL-A19V07 8821CPNG5CV5
8821CPNG4RJ1 SHIVAKI STV -1449
ЗАМЕНИЛ НА 8821CPNG5CR2N ERISSON 1401 вместе соответствующей прошивкой без каких либо доработок
Polar 3.0 меняется на Polar 1.1. С доработкой. 4 Pin процессора - блокировка звука (после замены -нет звука). Можно просто отключить.
TDA9565PS/N1/5I XTV1.7i для всех TV ROLSEN 29"(50Hz)
TDA9565PS/N1/5I ATV1.8d для всех мультивизоров (TV+DVD) ROLSEN 29"(50Hz)
Это новые модели (57,157).
В РОЛСЕН D29R55T (старая модель) применяется и присылается TDA9365 с белой бумажной наклейкой NTDA9565PS/N3/5
В мультивизорах 21" идет TDA9352PS/N3/3I PXN 1,1g
STRF6168 = STRF6264 без переделки.
А полный аналог обеих LF1352 отсюда и замена
STRW6750F=STRW6753=STRW6754=STRW6756 = STRW6765=STR-X6757
ВНИМАНИЕ ! STR-W6756 не меняется ни на одну из выше упомянутых, т.к. те слишком маломощные
…оооооочень много раз мне пришлось столкнуться с проблемой перегоревших светодиодов, установленных где-либо в машине…началось всё это с лампочек в габаритах, потом постоянно горела подсветка приборки, потом подсветка блока отопителя, багажника и т.д…
Львиной долей нубов используется линейный стабилизатор напряжения L7812CV и его аналоги КРЕН, что, естественно, никакого толка не даёт и светики горят, как ни в чем не бывало :)
Вот он, виновник торжества.
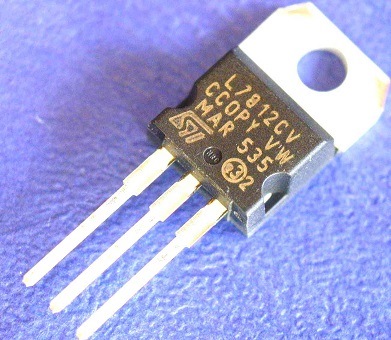
…хотя…его вины тут нет. Виноваты тут далекие от электроники люди, которые слишком мало копали, прежде, чем что-то сделать…
Начнем с того, что светодиоды сгорают от скачков тока, а не напряжения.
"Светодиод питается ТОКОМ. Нет у него параметра НАПРЯЖЕНИЕ. Есть параметр — падение напряжения! То есть сколько на нем теряется.
Если написано на светодиоде 20мА 3.4В, то это значить что ему надо не больше 20 миллиампер. И при этом на нем потеряется 3.4 вольта.
Не для питания нужно 3.4 вольта, а просто на нем «потеряется»!
То есть вы можете питать его хоть от 1000 вольт, только если подадите ему не больше 20мА. Он не сгорит, не перегреется и будет светить как надо, но после него останется уже на 3.4 вольта меньше. Вот и вся наука.
Ограничьте ему ток — и он будет сыт и будет светить долго и счастливо."
Теперь понятно, почему со стабами типа L7812CV постоянно все перегорает?
Да, стабилизация нужна по току, а не по напряжению и делается это токоограничивающими резисторами или линейными/импульсными стабилизаторами ТОКА!
Ладно, поехали дальше.
В связи с тем, что сейчас у меня висит 4 проекта по фарам, которые будут делаться на очень дорогостоящих COB кольцах (которые ещё дороже стали с учетом долбанного курса валют) стабилизация таковых просто жизненно необходима…
Вот как оно выглядит
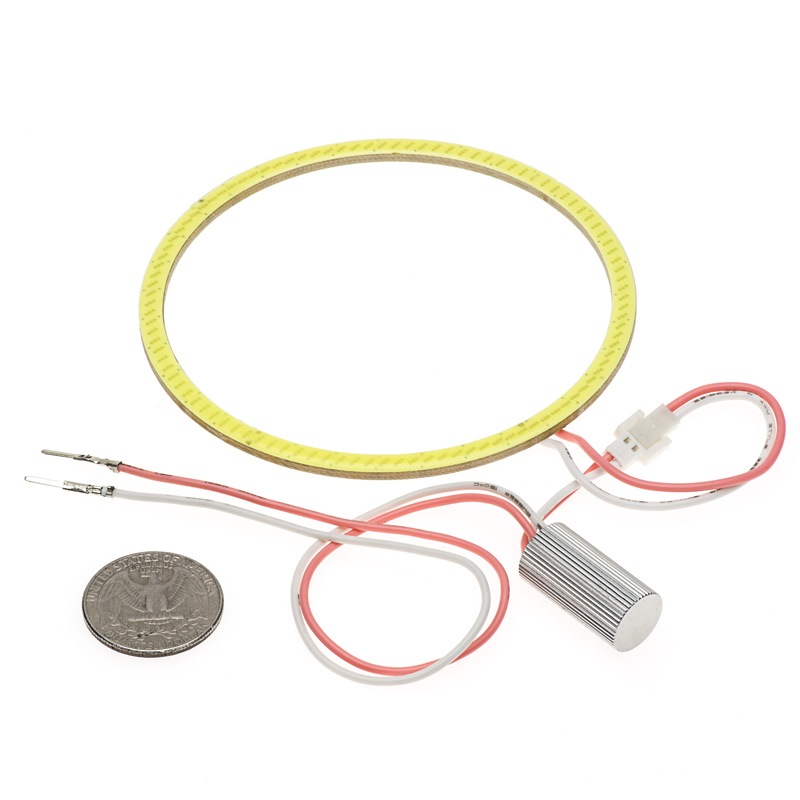
Вы спросите сейчас, а нафига драйвер, если вон он, уже висит и все стабилизирует.
Ну да, я тоже так думал, а на деле оказалось, что там те же самые стабилизаторы напряжения стоят (у одного из клиентов одно кольцо уже начало моросить). Ну кто ж знал, что Китайцы в плане драйверов решили сэкономить.
Итак, делаем простейший драйвер.
Берем идеальную автомобильную сеть 12 Вольт и считаем какой нам нужен резистор на примере COB кольца, мощностью 5 Вт.
ЭТО РАСЧЕТ РАБОТАЕТ, КОГДА ВЫ ТОЧНО УВЕРЕНЫ В ХАРАКТЕРИСТИКАХ СВЕТОДИОДА, ЕСЛИ НЕТ, ТО ДЕЛАЕМ ЗАМЕР ПОТРЕБЛЕНИЯ ТОКА МУЛЬТИМЕТРОМ!
КАК ЭТО ДЕЛАТЬ, СМОТРИМ ТУТ!
К слову, выше расчет, где я взял спецификацию диода от китайца, является неверным, ибо при замере фактическое потребление тока оказалось не 420 мА, а 300мА. Потому сразу можно сделать вывод, что пятью ваттами там и не пахнет :)
Дальше идем в магазин и покупаем:
-LM317. Внешне как и LM7812. Корпус один, смысл несколько разный.
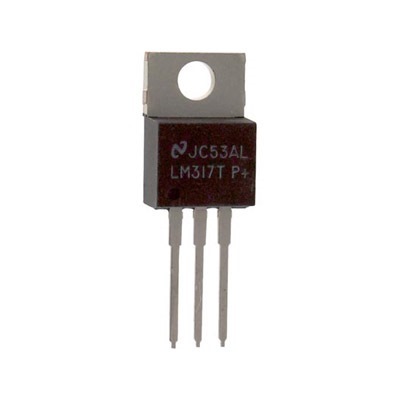
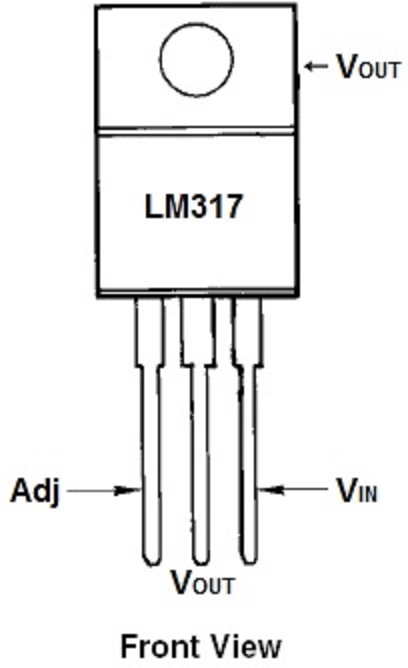
-Резистор, который посчитали выше
И подключаем это всё дело в режиме токового стабилизатора.
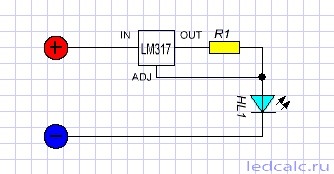
В итоге получили на выходе стабилизированный ток.
Но это для идеального случая. Что касается случая с реальным автомобилем, где скачки до 14 Вольт с копейками бывают, то рассчитывайте резистор для худшего случая с запасом.
Кто не могёт паять по схемам, то даю картинку, где все нарисовано более наглядно
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели. C помощью микросхемы драйвера или готового шилда motor shield можно создавать мобильных роботов, автономные автомобили на ардуино и другие устройства с механическими модулями. В этой статье мы рассмотрим подключение к ардуино популярных драйверов двигателей на базе микросхем L298N и L293D.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino. Реле по команде ардуино замыкает или размыкает контакты, тем самым включает или выключает ток. Соответственно, двигатель включается или выключается. Главным преимуществом этой схемы является ее простота и возможность использовать Главным недостатком данной схемы является то, что мы не можем управлять скоростью и направлением вращения.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Принцип действия H-моста
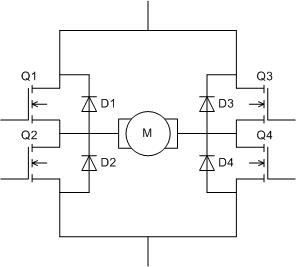
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой. Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В. При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
Плата выглядит следующим образом:

Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).

При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.

Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.

Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей. Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены
. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
Шаговый двигатель это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Один оборот ротора (360°) состоит из определённого количества шагов. Количество полных шагов в одном обороте указывается в технической документации двигателя.
Например, ротор шагового двигателя 17HS1352-P4130, за один полный шаг, поворачивается на 1,8°. Значит для поворота ротора на 360° двигатель должен совершить 200 полных шагов.
Для совершения одного полного шага на обмотки двигателя поступает серия сигналов от драйвера (как в полношаговом «1», так и в микрошаговых режимах «2», «4», «8», «16»).

С принципом работы шаговых двигателей можно ознакомиться в разделе Wiki - ШД.
Микрошаг:
Большинство драйверов позволяют разделить полный шаг двигателя на несколько микрошагов. Выбор микрошага устанавливается согласно таблице в инструкции к драйверу. В таблице указывается количество микрошагов на полный шаг «Microstep» (1/2/4/8/16/32/. ) и/или количество тактов на полный оборот вала «Pulse/rev» (200/400/800/1600/3200/6400/. ).
Если для целого поворота ротора двигателя в режиме 1 микрошаг на полный шаг требуется 200 тактов, то в режиме 4 микрошага на полный шаг, потребуется уже 800 тактов.
Чем больше микрошагов в полном шаге, тем точнее и плавнее поворачивается ротор шагового двигателя, но для поддержания той же скорости, требуется увеличивать частоту следования тактовых импульсов.
Ограничение тока фазы:
Большинство драйверов позволяют ограничить ток фазы (ток протекающий через обмотки двигателя). Выбор тока фазы осуществляется согласно таблице в инструкции к драйверу. В таблице указывается действующий ток «Current» и/или пиковый ток «PK Current». Чем выше ток, тем выше отдаваемый момент (сила двигателя).
Слишком большой ток приведёт к перегреву двигателя и может вызвать его поломку, а слишком маленький может привести к пропуску шагов, или нестабильному вращению ротора.
У некоторых драйверов ограничение тока осуществляется поворотом потенциометра.
Ток удержания:
Ток удержания это постоянный ток проходящий через обмотки двигателя, удерживающий вал в неподвижном состоянии. Некоторые драйверы позволяют снизить ток удержания.
Снижение тока удержания приводит к снижению нагрева двигателя при его удержании.
Силовые выводы драйвера:
Силовые выводы используются для подачи напряжения питания шагового двигателя и подключения его обмоток.
Подключение обмоток двигателя к драйверу зависит от количества выводов у двигателя.

Драйверы DM860H, DM556, TB6600 позволяют работать только с биполярными двигателями. Двигатели с 4 выводами подключаются по схеме А. Двигатели с 6 выводами подключаются по схеме Б или В. Двигатели с 8 выводами подключаются по схеме Г или Д.
Запрещается подключать или отключать обмотки двигателя на включенном драйвере!
Сигналы управления STEP/DIR (PUL/DIR):
Сигналы управления CW/CCW:
(Данные сигналы не поддерживаются драйверами DM860H, DM556, TB6600)
Подключение управляющих выводов драйвера:
Для подключения управляющих выводов можно использовать одну их следующих схем:

Допускается подключать драйвер к контроллеру без использования сигнала ENABLE, тогда выводы ENA+ и ENA- остаются свободными (не подключёнными).
- При уровне логической «1» = 5В, все сопротивления R исключаются из схемы.
- При уровне логической «1» = 12В, все сопротивления R равны 1кОм.
- При уровне логической «1» = 24В, все сопротивления R равны 2кОм.
Подключение драйвера к Arduino:
Так как логические уровни Arduino UNO равны 5В, то при подключении управляющих выводов к драйверу, ограничивающие сопротивления R не нужны.
Для подключения драйвера к Arduino воспользуемся схемой где выводы PUL-, DIR-, ENA- подключены к GND контроллера (правая схема на картинке выше).
Если подключить драйвер к Arduino без использования сигнала ENABLE, оставив выводы ENA+ и ENA- не подключёнными, то приведённый ниже скетч не сможет освобождать вал. Вал двигателя будет удерживаться всё время, пока он не вращается.

Выводы драйвера ENA+, DIR+ и PUL+ можно подключить к любым выводам Arduino, их номера указываются в начале скетча. В примере это выводы 2, 3 и 4 соответственно.
Если для подключения драйвера воспользоваться схемой где выводы PUL+, DIR+, ENA+ подключены к 5V контроллера (левая схема на картинке выше), то в скетче нужно изменить логические уровни устанавливаемые функциями digitalWrite().
Управление двигателем при помощи Arduino:
Для работы скетча установите микрошаг 1/4, что соответствует 800 тактов на 1 оборот. Микрошаг устанавливается DIP-переключателями драйвера согласно таблице на его корпусе.
Скетч постоянно повторяет 4 действия:
- Поворот вала на 2 полных оборота в одну сторону.
- Остановка двигателя на 5 секунд с удержанием вала.
- Поворот вала на 2 полных оборота в другую сторону.
- Остановка двигателя на 5 секунд с освобождением вала.
- Движение вала на 2 оборота в одну сторону:
Перед началом движения вала мы разрешаем работу двигателя (установив 0 на выводе ENA) и выбираем направление движения (установив 0 или 1 на вывод DIR), далее выполняем движение подачей импульсов на вывод PUL в теле цикла for. Каждый импульс поворачивает ротор на угол одного микрошага. Микрошаг установлен DIP-переключателями в положение 800 тактов на полный оборот. Код цикла выполняется 1600 раз, значит вал повернётся на 2 оборота. - Остановка вала с удержанием:
Двигатель не вращается, если на вывод PUL не поступают импульсы. Значит обычная задержка на 5000 мс приведёт к остановке двигателя на 5 секунд. Так как работа двигателя была разрешена (на выводе ENA ранее был установлен 0), то через обмотки двигателя будет протекать ток удержания вала. - Движение вала на 2 оборота в другую сторону:
Направление движения вала определяется логическим уровнем на выводе DIR. Ранее на нём был установлен 0, значит теперь нужно установить 1. Далее подачей импульсов на вывод PUL мы заставляем вращаться вал, но теперь в другую сторону. - Остановка вала без удержания:
В предыдущий раз мы останавливали двигатель прекращая подавать импульсы на вывод PUL, но не запрещали работу двигателя, в результате через его обмотки протекал ток удержания вала. Теперь мы запретим работу двигателя установив на выводе ENA уровень логической 1, что приведёт к исчезновению токов в обмотках двигателя. Теперь в течении 5 секунд, двигатель будет не только остановлен, но и его вал можно свободно вращать руками.
Управление шаговым двигателем по прерываниям от 2 таймера Arduino:
Данный скетч выполняет те же действия что и предыдущий. Но подача импульсов на вывод PUL осуществляется не в цикле основного кода, а по прерываниям от таймера.
Как только переменной step присваивается число отличное от 0, то на драйвер начинают поступать импульсы. Значение step убывает с каждым поданным импульсом, пока не достигнет 0, что приведёт к остановке вала двигателя. Частота подачи импульсов в Гц указывается функцией funcSetTimer2().
В данном скетче мы ждём завершение вращения вала проверяя значение step в цикле while, вместо этого можно выполнять другие действия, например, опрашивать концевики, датчики, измерять пройденное расстояние и т.д.
Читайте также: