
Среда программирования lego nxt
Robot Commander представляет собой управляющее приложение для LEGO® MINDSTORMS®. БЕСПЛАТНАЯ загрузка для большинства смартфонов и планшетов; Robot Commander подключается к модулю EV3 по Bluetooth®. Это простое в использовании приложение позволяет взаимодействовать с вашими уникальными роботами EV3, даже не подключаясь к компьютеру! Это означает, что вы можете мгновенно начать игру с вашими собственными роботами!

Приложения для компьютеров и планшетов
Приложения LEGO® MINDSTORMS® EV3 Home для macOS, Windows 10 и планшетов на iOS и Android
Загрузите, установите, подключите и выполняйте задания по программированию. Для пяти основных роботов есть до пяти задач по программированию. Благодаря более продвинутому, но хорошо знакомому интерфейсу программирования и пяти сложным заданиям для вас и ваших роботов-героев, приложение EV3 Home для PC, Mac и планшетов сможет поднять ваши навыки робототехники на новый уровень!
Важная информация относительно программного обеспечения и приложений LEGO® MINDSTORMS® EV3!
Мы рады сообщить, что пользователям LEGO MINDSTORMS EV3 теперь будут доступны новые возможности при сборке и программировании их творений.
Новое приложение LEGO MINDSTORMS EV3 Home с языком программирования на основе Scratch заменит используемое в настоящее время ПО LEGO MINDSTORMS EV3 Home Edition (Labview) для Windows 10 и macOS, а также приложение LEGO MINDSTORMS EV3 Programmer для планшетов на iOS/Android.
Приложение LEGO MINDSTORMS EV3 Programmer будет удалено из магазинов приложений в конце июня 2021 года.
Выведенное из эксплуатации ПО LEGO MINDSTORMS EV3 Home Edition (Labview) для Mac и PC можно найти ниже. Обратите внимание, что это ПО больше не поддерживается LEGO Group.
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.

Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.

Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.

Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.

Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках

Рисунок 4 — Окно Connections

Рисунок 5 — Окно Data Connections

Рисунок 6 — Законченный вид диаграммы

2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.

Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.
Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.
Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.
Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.
Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках
Рисунок 4 — Окно Connections
Рисунок 5 — Окно Data Connections
Рисунок 6 — Законченный вид диаграммы
2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.
Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,

Лет эдак в 10-11, после долгих и беззаботных лет игры с контрукторами Lego, я узнал о существовании великолепного набора Mindstorms, который позволял создавать самых настоящих роботов без специализованных знаний электроники, электротехники и даже программирования. Я сразу же заинтересовался данной серией, но тогда моим мечтам обладать Mindstorms по различным (в основном — финансовым) причинам не суждено было сбыться.
Сейчас мне 20 и в честь юбилея друзья (спасибо им!) решили окунуть меня назад в детство и таки дать возможность полепить собственных роботов. Правда, в этот раз всё будет серьёзнее, чем в моих детских мыслях — мы будем действительно программировать Mindstorms под Debian GNU/Linux.
Неплохо, да?
Собственно, данный робот и будет нашей основной тестовой моделью. Но мы попробуем немного усовершенствовать его навыки. И для этого мы напишем небольшой кусочек кода.
Действительно. Идущее в комплекте ПО работает только в Windows и Mac OS. А у нас, внезапно, Debian Squeeze. К счастью, Mindstorms обладает огромным сообществом фанатов, которые придумали решение данной проблемы — использование альтернативного ПО для программирования роботов, в частности Bricxcc (здесь выложен полнейший мануал по настройке всего и вся).
А теперь немного теории — в программировании Mindstorms, как правило, помимо визуального среды ROBOLAB для Windows и Mac OS используется язык RCX, однако среди фанатов одним из наиболее популярных языков является достаточно простой NXC (Not eXactly C). Простая программа на NXC выглядит примерно так:
- task music()
- int lastTone=5000;
- while ( true )
- int tone= Random (5000)+500;
- int duration= Random (500);
- PlayTone(tone,duration);
- Wait(duration);
- >
- >
- task main()
- start music;
- while ( true )
- /* Determine Next Action */
- unsigned int duration= Random (5000);
- unsigned int motorSpeed= Random (100);
- unsigned int syncMode= Random (3);
- /* Display Next Action */
- ClearScreen();
- NumOut(0,LCD_LINE1,duration);
- NumOut(0,LCD_LINE2,motorSpeed);
- NumOut(0,LCD_LINE3,syncMode);
- /* Perform Next Action */
- switch (syncMode)
- case 0:
- OnFwdReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 1:
- OnRevReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 2:
- OnFwdSync(OUT_AC,motorSpeed,-100);
- break ;
- case 3:
- OnRevSync(OUT_AC,motorSpeed,-100);
- break ;
- >
- Wait(duration);
- >
- >
Для справки — данная программа заставляет «танцевать» нашего робота под нечто, напоминающее музыку.
Не буду спорить, программа совсем не сложна для понимания, но достаточно громоздка. И её можно заметно упросить, используя вместо написания кода на NXC специальный конвертер PyNXC. Иначе говоря, мы будем писать код на Python'е, а PyNXC будет преобразовывать его в NXC-код и загружать на устройство, избавив нас от необходимости писать громоздкий код на подобии Си.
Ну, а теперь, собственно, напишем на Python'е программу для путешествия нашего робота среди прозрачных чашек, но используя более грамотный алгоритм разворота:
Теперь наш робот научился разворачиваться на месте и, как только мешающий объект пропадет с поля его зрения, продолжать движение вперед.
Как вы уже, наверное, заметили, программировать Mindstorms очень просто. Стоит также сказать, что помимо NXC и Python с использованием PyNXC, можно писать код на Java, Lua, Ruby, Ассемблере, а также, что логично, использовать ассемблерные вставки в других языках.
Благодаря всему этому Mindstorms из детской игрушки превращается в весьма мощную штуку, позволяющую создавать сложные и «умные» механизмы, как например вот эта гитара:

Вязовов Сергей Михайлович, заведующий кафедрой информатики МАОУ "Лицей №14 имени Заслуженного учител Российской Федерации А.М.Кузьмина" г.Тамбова
Графическая среда NXT-G используется для программирования микрокомпьютера NXT. Данный софт имеет интуитивно понятный интерфейс, создание программ управления роботами напоминает создание блок-схем и осуществляется с помощью специальных блоков, размещаемых на LEGO-балках вдоль оси последовательности действий. Порядок выполнения программы определяется порядком следования блоков. Подключение новых компонентов выполняется путем их «перетаскивания» с палитры программирования на LEGO-балку.
Каждый из иконок-блоков обладает набором уникальных характеристик, определяющих поведение робота. В NXT-G имеются блоки: для арифметических операций (сложения, вычитания, умножения и деления), для таймеров, для переменных, для сравнения числовых значений (меньше, равно, больше). Присутствуют блоки, отвечающие за звуковые эффекты роботов или за возможность бесконечного повторения установленных действий и за их завершение по определенным событиям. В программе возможно создание своих собственных компонентов, каждый из которых будет являться последовательностью стандартных блоков, объединенных вместе.
Среди основных достоинств среды визуального программирования – наглядность и простота в использовании, позволяющая быстро освоить программное обеспечение без особых усилий. Однако диапазон функциональных возможностей NXT-G весьма ограничен и требует для работы значительных ресурсов персонального компьютера. Последнее в свою очередь является существенной преградой при разработке сложных проектов.
1. РАБОЧЕЕ ПОЛЕ NXT-G
Для создания новой программы для NXT необходимо выполнить команду File – New.
Рабочее пространство разработки программы для NXT выглядит следующим образом:
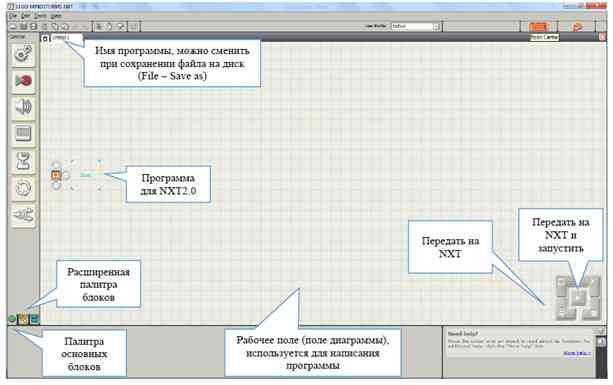
Создание программы для NXT представляет собой перемещение необходимых блоков (с точки зрения логики работы программы) из основной или расширенной палитры блоков на рабочее поле, а также настройка блоков.
Написание эффективных программ для роботов, принимающих участие в робототехнических соревнованиях, как правило, требует использования расширенной палитры блоков.
2. ГРУППА БЛОКОВ «COMMON»
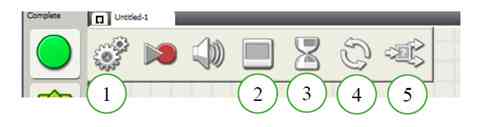
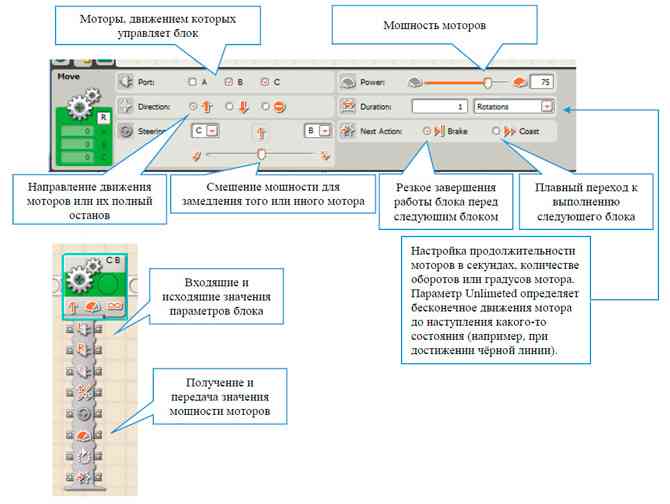
Блок «Move» - блок управления движением. Используется для программирования синхронной работы двух или трех сервомоторов. Однако, его можно использовать и для управления движением только одного мотора.
Блок «Display» - вывод информации на экран блока NXT.
3. БЛОК ОЖИДАНИЯ СОСТОЯНИЯ – «WAIT»
Параметрами блока «Wait» являются значения датчиков или таймер.

Для соревнований «Hello, robots!» нам понадобится датчик освещённости, датчик цвета (работающий в режиме датчика освещённости), ультразвуковой датчик и кнопка.
Датчик освещённости – Light Sensor
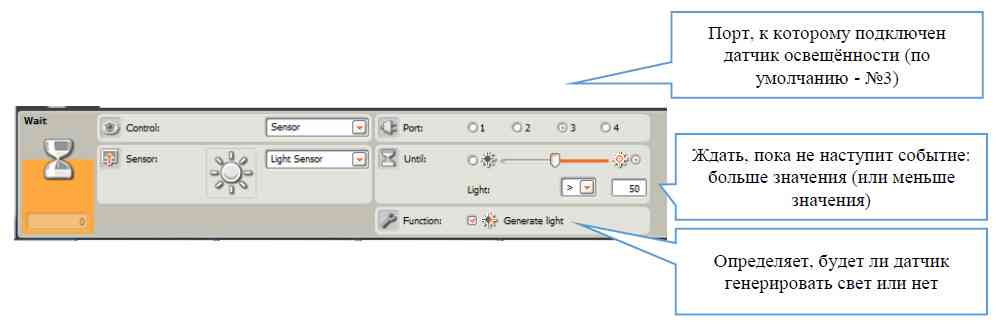
Обратите внимание, что датчик определяет уровень отражённого от объекта (поверхности) света. Чем значение ближе к 100, тем больше света отражено (то есть цвет поверхности ближе к идеальному белому). И наоборот, чем ближе к 0, тем больше света было поглощено (то есть цвет поверхности ближе к идеальному чёрному).

Датчик цвета – Color Sensor
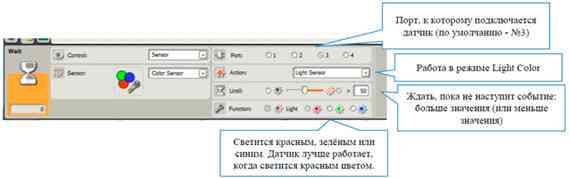
Кроме параметров настройки, датчик цвета в режиме Light Sensor работает точно также, как и датчик Light Sensor.
Ультразвуковой датчик – Ultrasonic Sensor
Ультразвуковой датчик используется для определения расстояния до объектов. Его можно использовать для поиска банок в соревнованиях «Кегельринг» и «Биатлон».
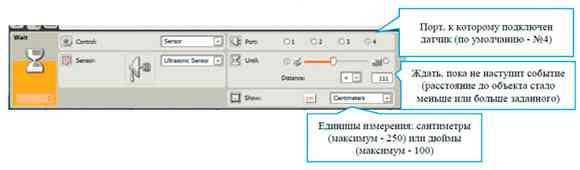
При такой настройке сенсора (как на рисунке выше), предыдущий блок будет выполняться до тех пор, пока расстояние до объекта не окажется меньшем 111 см.
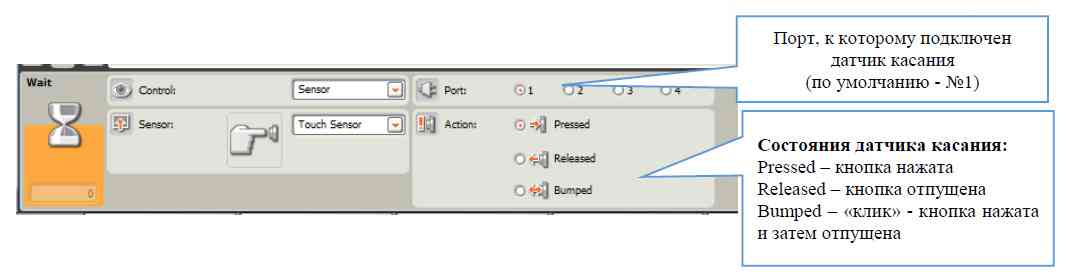
Кнопка – Touch Sensor
В робототехнических соревнованиях часто используют кнопку для старта робота. В других видах соревнований кнопка может быть использована для обнаружения объектов или препятствий.
4. Блок цикла «LOOP»
Цикл «Loop» позволяет обеспечить многократное выполнение одной и той же группы блоков.
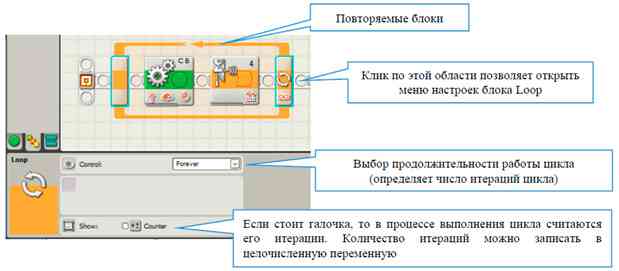
В качестве параметра «Control», определяющего число итераций цикла (количество повторений блоков) может выступать одно из следующих значений:
Forever – бесконечное количество итераций цикла (цикл никогда не завершится).
Sensor – работа цикла продолжается до тех пор, пока не будет получено заданное состояние датчика.
Time – цикл работает в течение заданного количества секунд.
Count – реализации цикла со счётчиком – задаётся точное количество итераций цикла.
Logic – в цикл как параметр передаётся логическое значение, в зависимости от которого цикл либо продолжает свою работу, либо завершает. Возможно сравнение логического значения как с истиной, так и с ложью.
5. Блок «SWITCH» - Выбор
Блок «Switch» позволяет реализовать ту или иную группу блоков, в зависимости от значений принятых параметров. В качестве принимаемых параметров могут быть:
Читайте также: