
Шорт трек лего ev3
Цель робота - за минимальное время проехать, следуя по линии N полных кругов (количество кругов определяет судья соревнований).
Круг - робот полностью проезжает трассу и возвращается в место старта, пересекая при этом линию старта-финиша.
- Максимальные размеры робота 200*200*200 мм
- Робот должен быть автономным.
- Сборка робота осуществляется в день соревнований. До начала времени сборки робота все части робота должны находиться в начальном состоянии (все детали отдельно). При сборке робота нельзя пользоваться инструкциями, как в письменном виде, так и в виде иллюстраций.
- Во время заезда робот не может изменять свои размеры
- Количество используемых моторов не ограниченно.
- Допускается использование только одного контроллера в конструкции робота.
- Движение роботов начинается после команды судьи и нажатия оператором кнопки RUN робота (или другой) или с помощью датчика
- Количество квалификационных заездов определяет главный судья в день соревнований
- В квалификационных заездах может участвовать как 1 так и 2 робота, на усмотрение судьи соревнований
- Роботы устанавливаются перед линией старта, в одинаковом направлении
- Если робот не может продолжить движение в течении 30 секунд или он мешает прохождению трассы соперником, заезд может быть остановлен судьёй
- Заезд на квалификационном этапе состоит из 2 полных кругов.
- Окончание заезда фиксируется судьёй состязания
- Фиксируется полное время прохождения трассы
- Если робот сходит с дистанции (оказывается всеми колесами с одной стороны линии), то он снимается с заезда, при этом роботу записываются количество пройденных кругов и время прохождения каждого круга
- В финальных заездах участвуют одновременно два робота на поле
- В финальных заездах роботы устанавливаются у линий старта в одинаковом направлении, дорожки для роботов выбираются с помощью жеребьёвки. К роботу прикрепляется флажок синего или красного цвета для облегчения идентификации робота. Флажки представляются организаторами
Соревнования проводятся в два этапа - квалификация и финальные заезды. Между этапами участникам будет дано время на отладку конструкции и программы робота (не менее 20 минут)

На занятии рассматривается назначение шорт-трека, условия состязания, правила проведения, поле для шорт-трека. А также требования к роботу, рекомендации по сборке. Приводится пример программы для робота с 2 датчиками цвета.
Содержимое разработки
Методическая разработка открытого занятия
«Шорт-Трек. Робот для Шорт-Трека»
Направление: «Современный урок и внеурочная деятельность»
Ковязин Владимир Анатольевич,
Педагог дополнительного образования
Муниципальное бюджетное образовательное учреждение дополнительного образования детей
Страна: Россия
629300 ЯНАО г. Новый Уренгой
ул. Молодежная, 17-А
E-mail: kovyazin[email protected]mail.ru
т: 89124307079
проектирование и конструирование;
поиск альтернативных творческих решений;
развитие пространственных и математических представлений в процессе конструирования.
образовательная: формировать умения и навыки проектирования и конструирования;
развивающая: развивать конструкторские навыки, творческое воображение;
воспитательная: воспитывать трудолюбие и стремление добиваться выполнения поставленной задачи.
Оборудование: компьютер, конструктор Lego Mindstorms EV3, поле Шорт-Трек.
Ход занятия
Организационный момент.
Блиц опрос.
1) Какие виды моторов используются в конструкторе Lego Mindstorms EV3?
2) Какие виды механических передач вам известны?
3) Чем рама отличается от балки?
4) Какие виды крепежных деталей из конструктора Lego вы знаете?
5) Чем втулка отличается от штифта?
6) Какую деталь конструктора называют ступицей?
7) К каким портам модуля подключают датчики и моторы?
8) Как перезагрузить модуль EV3?
Изучение нового материала.
Назначение Шорт-трека.

Шорт-трек является логическим завершением движения роботов по черной линии. По своей сути он представляет собой гонку роботов. Робот должен двигаться по черной линии как можно точнее и быстрее.
Цель робота – за минимальное время проехать по линии N полных кругов (количество кругов определяет главный судья соревнований в день соревнований). Движение осуществляется в направлении по часовой стрелке. Круг – полный проезд роботом трассы, с возвращением в место старта, пересекая при этом линию старта-финиша.
Правила проведения состязаний
Квалификационные заезды
1. Количество квалификационных заездов определяет главный судья в день соревнований.
2. В квалификационном заезде участвует 1 робот.
3. Робот устанавливается перед линией старта.
4. Заезд останавливается судьей, если робот не может продолжить движение в течении 30 секунд или время прохождения трассы превышает 60 секунд.
5. Заезд на квалификационном этапе состоит из одного полного круга.
6. Окончание заезда фиксируется судьей состязания.
7. Фиксируется время прохождения трассы.
8. Если робот сходит с дистанции (оказывается всеми колесами с одной стороны линии), то он снимается с заезда, при этом роботу записываются время, равное 60 секунд.
Финальные заезды
1. В финальных заездах участвуют одновременно два робота (пара) на поле.
2. Пары для заездов и дорожка каждого робота определяются с помощью жеребьевки.
3. Роботы устанавливаются у линий старта в одинаковом направлении.
4. В ситуации, когда робот догоняет соперника, заезд досрочно завершается, но при условии проезда не менее 5 секунд без столкновения. Победителем заезда объявляется робот, догнавший соперника.
Столкновение роботов
2. В случае, когда невозможно определить виновника столкновения, судья обязан назначить переигровку, при этом роботы меняются дорожками.
Определение победителя
Соревнования проводятся в два этапа – квалификация и финальные заезды. Между квалификационными заездами будет предоставлено время на дополнительную отладку робота. Между квалификационными и финальными заездами роботы остаются в карантине, время на отладку не предоставляется.
1. По результатам квалификации на основании времени заездов составляется рейтинг роботов.
2. В финальные заезды проходят роботы, занявшие первые места в квалификации. Количество финалистов определяется главным судьей соревнований в день соревнований в зависимости от количества команд участников.
3. Финальные заезды проходят по олимпийской системе (игра на вылет). Судьи соревнований формируют турнирную сетку, в каждом круге из участников составляются пары в соответствии с рейтингом квалификационных заездов и жеребьевки.
4. Из каждой пары в следующий круг выходит победитель заезда.
5. Перед финальным кругом судьи соревнований проводят заезд за третье место.
6. Победителем соревнования становится робот, победивший в финальном круге. Второе место присуждается роботу, проигравшему в финальном круге.
Поле для Шорт-Трека

1. Размеры игрового поля 1200*2400 мм.
2. Поле представляет собой белое основание с черной линией траектории.
3. Линии на поле могут быть прямыми, дугообразными, пересекаться под прямым углом.
5. На линии возможно размещение препятствий (только в одном месте большого и малого круга): горка (размер: 250 мм шириной, 250 мм длиной и 30-50 мм высотой; основной цвет поверхности белый), балка (высотой и шириной в один модуль; длиной не менее 250 мм; цвет белый). Препятствия жестко закреплены на поверхности поля, линия трассы на препятствиях не прерывается. Наличие и место расположения препятствий объявляется в день соревнований.
Требования к роботу для Шорт-Трека
1. Максимальные размеры робота 200*200*200 мм.
2. Во время заезда робот не может изменять свои размеры
3. Допускается использование только одного контроллера в конструкции робота.
4. Движение роботов начинается после команды судьи и нажатия оператором кнопки или с помощью датчика, при этом робот стоит на полигоне.

Сборка своего робота для Шорт-Трека
Выполняется самостоятельно на усмотрение обучающихся из конструктора Lego Mindstorms EV3.
Робот должен иметь ультразвуковой, или инфракрасный датчик для обнаружения соперника. А также 2, или 3 датчика цвета для движения по черной линии. Результат движения робота зависит от количества датчиков, их расположения, а также ходовой части робота (колес).
При этом важно обратить внимание на то, чтобы конструкция робота была компактной и прочной.
Пример программы для робота с 2 датчиками цвета
Программа представляет собой конструкцию цикл в цикле.

Внутренний цикл предназначен для движения робота по черной линии. Он прерывается, когда робот обнаруживает своего соперника на расстоянии 15 см и менее. Робот останавливается. После чего весь процесс движения вновь повторяется во внешнем цикле.
Программа для робота с 3 датчиками цвета будет иметь похожий вид.
Подведение итогов:
а) Просмотр и сравнение собранных конструкций;
б) Отладка роботов и проведение пробных заездов;
в) Проведение соревнований.

-82%


ПОМОГИИТЕ пожалуйста можете скинуть прогамму для шорт трек и чертежника для EV3 заранее спасиибо



Здравствуйте, в этом году ребята впервые будут выступать в номинации сумо.Не прошу программы и инструкции к роботам, с этим вполне справимся сами, прошу скинуть ссылки на статьи которые стоит почитать, чтобы сконструировать правильно робота и знать на что расставлять акценты. Заранее спасибо!

Вера, из собственных материалов можем предложить видео с подобной подготовки, где мы проводим ряд экспериментов и рассказываем о наших конструкциях и программах для сумо

Всем привет, подскажите как сделать программу для езды по черной линии( 2 датчика) MINDSTORMS
Заранее спасибо!


ПОМОГИИТЕ пожалуйста кто может скинуть программу и инструкцию сборки для чертежника для NXT заранее спасибо


Кто может помочь сделаит робо руку то есть скинуть либо картинку робо руки или инструкцию.если картинку то со всех ракурсов

Строим из LEGO Mindstorms и Technic, вот какая есть проблема. Выкладываешь программу, которую писали тетка и маленький пацан, и местные завсегдатаи начинают над ней ржать. Типа какой идиот такое написал. Умными никто не рождается. Просишь готовую программу не с целью слямзить, а с целью посмотреть, научиться, разобраться (ну не все члены сообщества студенты факультетов робототехники!), а в ответ - ваше высказывание под номером 1(((

Всем привет!Помогите пожалуйста как сделать из Mindstorms NXT не EV-3, шорт трек LEGO, помогите пожалуйста завтра соревнование

Помогите пожалуйста с программой для стедикама из nxt. Не для сорев, для себя. Сообразить как это сделать никак не могу

Анна, проблема такая действительно есть и эта проблема - глобальная, не только в нашем сообществе. Дело в том, что образовательная робототехника в России имеет очень заметный перекос к спортивной составляющей, а там где спорт - нам всегда конкуренция. Тренерам нужны победы детей для подтверждения своего статуса, вложенных средств, актуальности рабочего места.. Им не выгодно делиться своими наработками - иначе в средующий раз придется бороться уже с самим собой, улучшать собственный результат. Дело не в том, что Вам не хотят помочь, дело в том, что в этот самый спорт нужно идти тогда, когда вы крепко встали на ноги в обычных, не спортивных типовых компетенциях. Осваивать робототехнику на примере спортивных наработок других команд это тупиковый путь. Но это мое личное мнение, которое может не совпадать с мнением большинства.

Андрей, возможно, это действительно неверный путь, я - дилетант в робототехнике, но я мама, которая пытается помочь ребенку младшего школьного возраста, которому интересно все это. А как еще? Учитель слабоват, других посильнее нет, а ребенку нравится. Даже Бог с ними с соревнованиями, просто интересно учить робота тому, другому. Вот нашли два чужих лабиринта, залили и два дня всей семьейковырялись, разбирались. Книги читать - для непродвинутых это китайская грамота. В общем как еще разбираться пока не придумала. Репетитора искала - в нашем городе не нашла. Я кукол шью: Когда начинала, шила по готовым выкройкам из инета, а когда научилась, мне чужие даром не нужны стали работает ли этот принцип тут - пока не скажу
Оборудование: ПК, конструктор Lego Mindstorms EV3, поле для Шорт-Трека.
Ход занятия
Блиц опрос.
1) Какие виды штифтов различают в конструкторе Lego Mindstorms EV3?
2) Какие виды втулок различают в конструкторе Lego Mindstorms EV3?
3) Какие виды механических передач вы знаете?
4) Какие штифты нужно использовать при сборке ходовой у шагоходов и почему?
5) Как правильно подключить к портам датчики и моторы в конструкторе Lego Mindstorms EV3?
6) Как перезагрузить модуль EV3?
- Знакомство с регламентом соревнований.
- Поле для Шорт-Трека. Количество заездов и участников.

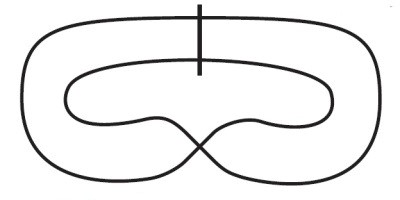
Поле состоит из 2-х соединенных и пересекаемых путей, разделенных линией старта-финиша.
Количество заездов определяется судьёй. В одном заезде одновременно участвуют 2 робота. Роботов ставят перед линией старта-финиша и запускают по сигналу судьи в направлении по часовой стрелке.

Размеры робота не должны превышать по высоте, ширине и длине: 210 мм.
Конструкция робота должна быть прочной.
3) Программа для Шорт-Трека.
Программа представляет собой конструкцию цикл в цикле.
Внутренний цикл позволяет двигаться роботу по черной линии с помощью 2 датчиков цвета и при обнаружении (с помощью ультразвукового датчика) спереди робота на расстоянии менее, или равно 15 см останавливаться. Внешний цикл бесконечно повторяет этот процесс.
Подходящую скорость движения робота можно настроить, регулируя мощность моторов (В+С), во внутреннем цикле.
- Подготовка роботов и пробные заезды.
Перед заездом необходимо проверять и укреплять ходовую часть робота (обычно подправляют вылезающие штифты). Пробные заезды необходимы, чтобы проверить, настроен ли робот на оптимальную скорость движения по чёрной линии. Как правило, на это отводится (10 -12) минут.

Соревнования проводятся под руководством судьи. Определение участников для первого заезда выполняется жеребьевкой. Длина заезда - 1 полный круг. Побеждает робот, который быстрее пройдёт свой круг. Если робот сходит с чёрной линии, или мешает сопернику пройти перекрёсток, то он дисквалифицируется.
Возрастная группа «Изобретатель». Состав команды до 2-х участников.
Игровое поле

Робот
- Максимальные размеры робота 250*250*250 мм.
- Во время заезда робот не может изменять свои размеры.
- Допускается использование только одного контроллера в конструкции робота.
- Робот может быть собран из любого образовательного конструктора или любых подручных материалов. К соревнованию не допускаются готовые роботы фабричной сборки.
Правила проведения состязаний
Цель робота – за минимальное время проехать по линии полный круг. Движение осуществляется в направлении по часовой стрелке. Круг – полный проезд роботом трассы, с возвращением в место старта, пересекая при этом линию старта-финиша. Организаторы вправе ввести дополнительное задание для участников и дать 1 (один) час на его выполнение. Если, во время заезда, робот не выполняет дополнительное задание, предложенное организаторами, то ему начисляются 15 секунд штрафного времени.
На стартовой позиции робот устанавливается колесами перед линией старта. Движение роботов начинается после команды судьи и нажатия оператором кнопки или с помощью датчика, при этом робот не может приподниматься и остаётся на стартовой позиции.
Соревнования проводятся в два этапа – квалификация и финальные заезды. Между квалификационными заездами будет предоставлено время на дополнительную отладку робота. Между квалификационными и финальными заездами роботы остаются в карантине, время на отладку не предоставляется.
- В ходе заезда действует правило “перекресток проезжает первый”. Робот, пришедший к перекрестку вторым, обязан пропустить первого, в случае столкновения – дисквалификация участника, совершившего наезд на соперника.
- В случае, когда невозможно определить виновника столкновения, судья обязан назначить переигровку, при этом роботы меняются дорожками.
Квалификационные заезды:
- Количество квалификационных заездов определяет главный судья в день соревнований.
- В квалификационном заезде участвует 1 робот.
- Робот устанавливается перед линией старта.
- Заезд останавливается судьей, если робот не может продолжить движение в течении 30 секунд или время прохождения трассы превышает 120 секунд.
- Заезд на квалификационном этапе состоит из одного полного круга.
- Окончание заезда фиксируется судьей состязания.
- Фиксируется время прохождения трассы.
- Если робот сходит с дистанции (оказывается всеми колесами с одной стороны линии), то он снимается с заезда, при этом результат данного заезда не учитывается, хотя попытка считается использованной.
Финальные заезды:
- В финальных заездах участвуют одновременно два робота (пара) на поле.
- Пары для заездов и дорожка каждого робота определяются с помощью жеребьевки.
- Роботы устанавливаются у линий старта в одинаковом направлении.
- В ситуации, когда робот догоняет соперника, он продолжает движение за соперником до пересечения линии финиша, не допуская столкновения. Если робот, догнавший соперника, провоцирует столкновение, победителем признаётся его соперник.
Определение победителя:
- По результатам квалификации на основании времени заездов составляется рейтинг роботов.
- В финальные заезды проходят роботы, занявшие первые места в квалификации. Количество финалистов определяется главным судьей соревнований в день соревнований в зависимости от количества команд участников.
- Финальные заезды проходят по олимпийской системе (игра на вылет). Судьи соревнований формируют турнирную сетку, в каждом круге из участников составляются пары в соответствии с рейтингом квалификационных заездов и жеребьевки.
- Из каждой пары в следующий круг выходит победитель заезда.
- Перед финальным заездом проводится заезд за третье место.
- Победителем соревнования становится робот, победивший в финальном заезде. Второе место присуждается роботу, проигравшему в финальном заезде.
Все положения для проведения соревнований, конкурсов и высотавок по робототехнике
Мы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
Читайте также: