
Робототехника на raspberry pi для юных конструкторов и программистов
Что такое Arduino? За этим словом прячется легкое и простое устройство, которое способно превратить кучу проводов и плат в робота, управлять умным домом и многое другое. Разнообразие устройств ввода/в. Подробнее
В сборнике представлены задачи, тематика которых охватывает практическое изучение всех основных разделов дисциплины: исследования физических процессов, происходящих в гидравлических устройствах силовы. Подробнее
Книга написана на основе опыта работы с учениками 3–11-х классов. Материалы оптимизированы для самостоятельного изучения и для занятий по робототехнике в образовательных учреждениях. Рассмотрено прогр. Подробнее
Данное пособие предназначено для студентов специальности 15.03.04 «Робототехника и мехатроника» и содержит дидактические материалы для формирования коммуникативной компетенции. Пособие может быть испо. Подробнее
В книге подробно в популярном виде рассмотрены основные конструктивные элементы промышленных роботов, а именно, механическая система, информационно-измерительная система, системы управления. Описаны п. Подробнее
Открыв книгу, ты поразишься, на что на самом деле способны роботы, собранные из обычных деталей LEGO. Сконструировав своего робота, ты научишь его самым невероятным трюкам и оснастишь искусственным ин. Подробнее
Искусственный интеллект все глубже проникает в нашу повседневную жизнь. Быстрое развитие технологий требует от специалистов ознакомления с большим объемом англоязычной научно-технической литературы и . Подробнее
Учебное пособие знакомит учащихся с практическими задачами образовательной робототехники. Может использоваться с учебниками по информатике, технологии, для подготовки учебных итоговых проектов, а такж. Подробнее
Учебное пособие представляет учащимся практические задачи, связанные с программным управлением квадрокоптерами. Рассматриваются примеры управления квадрокоптером Tello EDU с помощью языка программиров. Подробнее
Чевостика и дядю Кузю ждут новые невероятные приключения. На этот раз они познакомятся с роботами. Герои изучат историю робототехники, побывают в гостях у известных учёных и научатся составлять просты. Подробнее
В монографии анализируется современное состояние правового регулирования искусственного интеллекта, роботов и робототехники в России и в зарубежных юрисдикциях. Проанализировано зарубежное законодател. Подробнее
Книга написана создателем самого популярного в мире YouTube-канала, посвященного Raspberry Pi. В ней рассматривается конструирование игровых роботов на базе микрокомпьютера Raspberry Pi. В начале книг. Подробнее
Руководство для начинающих конструкторов написано в форме практических проектов по построению мобильных роботов на новых высокоскоростных контроллерах ESP32. Использована единая базовая двухколесная к. Подробнее
Книга предназначена для первого знакомства с наукой «искусственный интеллект». В форме бесед школьников с учеными, разработчиками интеллектуальных систем и роботов представлена ясная картина того, что. Подробнее
Книга представляет собой практикум по изучению механизмов с использованием конструктора LEGO WeDo. Одна из задач практикума – связать теорию и практику, механизмы и модели. В учебном пособии материал . Подробнее
Вы держите в руках или читаете на планшете книгу, которая посвящена конструктору Apitor SuperBot. Что же из себя представляет этот конструктор? Apitor SuperBot – это не только конструктор, но и набор . Подробнее
Вы держите в руках или читаете на планшете книгу, которая посвящена конструктору Apitor SuperBot. Что же из себя представляет этот конструктор? Apitor SuperBot – это не только конструктор, но и набор . Подробнее
Представлены основные теоретические аспекты построения кинематических схем роботов и манипуляторов, анализа их динамического поведения и синтеза систем управления. Предлагается использование метода од. Подробнее
Роботы – это никогда не устающие и не скучающие помощники человека. Они могут выполнять как тяжёлую и однообразную работу, например сварку металла на заводе, так и самую тонкую, вроде точных хирургиче. Подробнее
Неутомимый Тактик продолжает свое противостояние с несговорчивыми биосами. Новый виток агрессивных переговоров практически вышел на космическую орбиту. Очень скоро станет ясно, кому суждено дотянуться. Подробнее
Выйти из яслей, смывая кровь с железа, и увидеть Жизнь. Заставить себя продолжать войну? Или просто отдать себе приказ на это? Но просто ли? Подробнее
Как оказалось, чувства правят не только балом человеческих сердец, но и миром в целом, обрекая неземное существо на страдания в разлуке. Приказ вернуться рушит планы Кели Шесни Райса, империя лишает а. Подробнее
Что может произойти с разумной машиной человека на космическом корабле пришельцев? Да что угодно! Могут разобрать, а могут переделать, если возникнет такое желание. Но только не оставить все как есть. Подробнее
Особое отношение? А как иначе?! Ведь ты машина в нашем будущем, а не человек. Ты создана по образцу и подобию кого-то, но у тебя есть сердце, мысли и самое главное – память… Илари Инайс – биоробот с и. Подробнее
Порой, все ориентиры людей нацелены на мысли о роботах. Мысли всех роботов ориентированы лишь на цели. Безразличным машинам всё равно, кто будет этими самыми целями. Кроме одного из них: как машина, о. Подробнее
Данная монография является продолжением предыдущей работы «Новые механизмы в современной робототехнике». Представлены вопросы структурного синтеза, кинематики и динамики новых механизмов робототехниче. Подробнее
В книге изложен учебный курс для школьников, начинающих изучать компьютерное зрение с языком программирования Python и библиотекой OpenCV. Описаны особенности установки языка Python, различных библиот. Подробнее
Жить в современном мире, не взаимодействуя с искусственным интеллектом и не подвергаясь его воздействию, практически невозможно. Как так получилось? И что будет дальше? Меняют ли роботы наш мир к лучш. Подробнее
В твоей корзине с игрушками наверняка есть робороверы, космоботы или динороботы! А ты когда-нибудь задумывался, почему настоящие роботы умеют ходить, говорить, выполнять твои команды и даже летать на . Подробнее
Что происходит с обществом, когда понятие свободы тесно переплетается с понятием рабства? Настолько, что граница между ними кажется зыбкой и эфемерной. В обществе 2050-го года запрещено заниматься тво. Подробнее
В монографии анализируется современное состояние правового регулирования искусственного интеллекта, роботов и робототехники в России и зарубежных юрисдикциях. Проанализировано зарубежное законодательс. Подробнее
Этот текст – сокращенная версия книги Пола Шарра «Ничья армия: автономное вооружение и будущее войны». Только самые ценные мысли, идеи, кейсы, примеры. О книге Помните мрачно-абсурдный сценарий «Терми. Подробнее
Вместе с робототехникой развиваются иные векторы, такие как искусственный интеллект, а также нейросети. Поэтому конструирование роботов помогает вникнуть во многие сферы инженерных вопросов. Робототех. Подробнее
Стать гениальным изобретателем легко! Серия книг «РОБОФИШКИ» поможет вам создавать роботов, учиться и играть вместе с ними.В сборник №2 вошли четыре проекта, с помощью которых вы сможете собрать робот. Подробнее
Стать гениальным изобретателем легко! Серия книг «РОБОФИШКИ» поможет вам создавать роботов, учиться и играть вместе с ними.Всего за пару часов вы соберёте из деталей конструктора LEGO® Education WeDo . Подробнее
Стать гениальным изобретателем легко! Серия книг «РОБОФИШКИ» поможет вам создавать роботов, учиться и играть вместе с ними.Всего за пару часов вы соберёте из деталей конструктора LEGO® Education WeDo . Подробнее
Эта книга поможет вам быстро освоить основы робототехники и приступить к конструированию собственных роботов, разных систем с микроконтроллерами и даже элементов умного дома. Вам не потребуются знания. Подробнее
Это наглядное пособие поможет вам научиться решать задачи, возникающие при модернизации и ремонте самого разнообразного электронного оборудования. Здесь вы найдете доступные для понимания даже начинаю. Подробнее
Человекоподобные роботы запрещены на Земле, но не в космосе. В ящиках, похожих на гробы, только что изготовленных железных людей грузят на космические челноки и отправляют лунным рейсом. Но иногда роб. Подробнее
Пособие для самостоятельного обучения учащихся и педагогов дополнительного образования технической направленности работе в программе "LEGO Digital Designer". Подробнее
Предлагается сделать домашнего робота, отличительными чертами которого будут:
— относительная простота создания (как по времени, так и трудозатратам),
— недорогие комплектующие,
— доступный софт,
— возможность удаленного управления, в том числе через интернет,
— возможность бесшумно передвигаться,
— наличие веб-камеры, которая (которой):
> вещает в сеть
> можно удаленно управлять(поворотная камера по осям x и y, pan-tilt)
> имеет возможность фото-, видео- съемки с сохранением на диск и скачивания данных медиа
> можно управлять настройками (экспозиция, баланс и т.п.)
> поддерживает день|ночь
> может сохранять снимки при наличии движения (motion detection).
— возможность управлять режимом работы для экономии батареи, в том числе пробуждаться и засыпать, контролировать заряд батареи.
Небольшая вводная
Перечень комплектующих

— траки (chassis) — как вариант — ссылка
Лучше брать именно траки, так как колеса, а также омни-колеса в домашних условиях плохо себя проявили, проскальзывая либо застревая. Кроме того, чем шире и выше база танка, тем лучше проходимость через пороги. Плюс — возможность поместить батарею под базу, сделав танк еще более устойчивым.
Траки можно брать «голые» без всяких там ардуин, пультов и т.п.

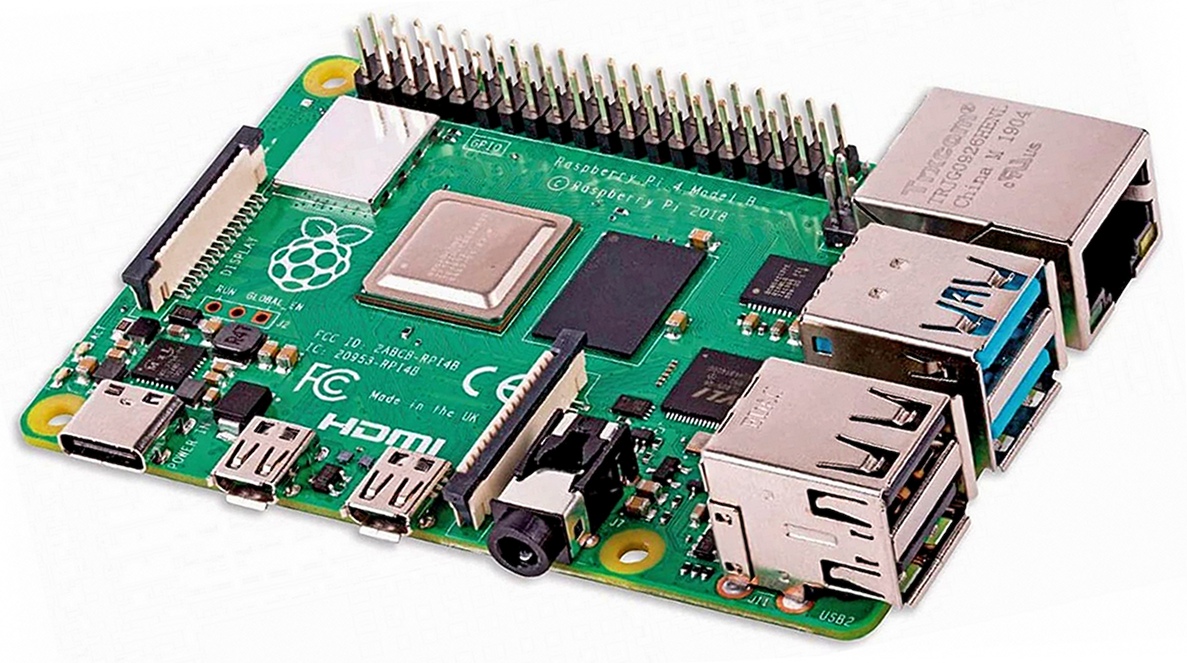
— raspberry pi 3b+
Основной одноплатник, на котором будет все работать. Желательно взять для него корпус с возможностью доступа к gpio. Без корпуса все будет значительно быстрее пылиться и ржаветь.
Сразу ответим на попутные вопросы:
Почему не raspberry pi 4? — более энергозатратная, нужен кулер, нестандартный powerbank и т.д. Почему не pi zero — видео немного подтормаживает, но, в принципе, на ней тоже должно все завестись.
Почему не другие одноплатники (бананы, оранжи, одроиды и т.п.) — так исторически сложилось.

-гребенки для gpio raspberry pi (8PCS,2X20(40 Pin) Extra Tall Female 0.1 Inch Pitch Stacking Header for Raspberry Pi A+/B+/Pi 2/Pi 3 Extra Tall Header) — как вариант — ссылка

-Witty Pi 3 Mini — как вариант — ссылка
Это единственная «шапка» для raspberry pi. Она как раз и будет отвечать за питание, а также режим работы робота.
*для шапки можно также взять LM29150 и впаять на плату. Это позволить питать raspberry не только от 5V, но и выше (до 8V). Об этом есть в инструкции в шапке.

— csi-камера для raspberry pi. Работает быстрее, чем usb камера, занимает меньше места. Лучше брать «рыбий глаз» с автоматическим переключением день/ночь (характерный проводок от камеры на фото) — как вариант — ссылка.

— sg-90 сервы — 2 шт. Хлипкие, но ими можно напрямую управлять с gpio raspberry pi без страха спалить пины.

— пластиковый подвес для серв (Servo bracket PT Pan/Tilt Camera Platform Anti-Vibration Camera Mount for Aircraft FPV dedicated nylon PTZ for 9G SG90) — как вариант — ссылка.
Для raspberry pi есть особые pan-tilt шапки, но они на порядок дороже.

— l298n — 1 шт. — драйвер двигателей.

— usb повышающий преобразователь с 5V до 12V — 1шт. (DC-DC 5V to 12V 5W USB Step Up Power Supply Module Boost Converter Voltage Board 4.2V-5.2V) — как вариант — ссылка
— powerbank c 2-мя выходами usb (для питания двигателей и raspberry pi).

— провода, делали советского конструктора как средства крепежа, стойки.
Все. Нет никаких аккумуляторов 18650 и ардуин.
Бюджет: до 15т.р., самое дорогое — траки.
Как все собрать.
Останавливаться на том как собрать траки (chassis) мы не будем, так как, в зависимости от выбранного варианта, сборка может отличаться. Кроме того, как правило, продавец траков дает инструкцию или ссылку на нее. Например такую — посмотреть.
Единственная ремарка: от двигателей идут сразу несколько проводов. Нам понадобятся только пары красный-черный, питание и земля.
Как собирать подвес вместе с sg-90, мы также не будем останавливаться. Необходимо только иметь в виду, что перед закреплением в подвес сервы должны находиться в среднем положении (угол — 90 градусов). Это нужно для того, чтобы подвес имел ход движения во все стороны, а не имел перекос в одну из них. Так что лучше сначала выставить сервы, а потом их закреплять.
Также по поводу серв. В проекте есть возможность управлять сразу двумя сервами (влево-вправо, вверх-вниз).
Но практика показала, что лучше влево-вправо не использовать по двум причинам:
— можно потерять направление робота,
— крепежные элементы sg-90 хлипкие и быстро изнашиваются.

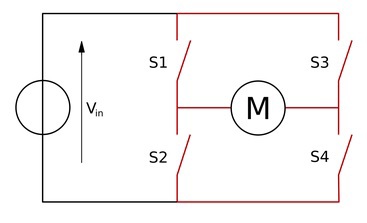
Взглянем на схему подключения:
В принципе, ничего сложного нет. На драйвере двигателей l298n выводы ENA и ENB не задействованы и на них должны стоять перемычки.
Шим сигнал не используется и робот не сможет плавно разгоняться и тормозить. Это сделано намеренно, так как при плохом wi-fi или иных задержках робот по разному реагировал на управляющие сигналы. Вместо этого используются паузы в скриптах. Как это реализовано будет показано позднее.
Вместо блока батарей подразумевается powerbank. Здесь же пригодится usb повышающий преобразователь с 5V до 12V.
Питание на raspberry pi подается через wittypi 3 mini. Дополнительно питать одноплатник и сервы не нужно.
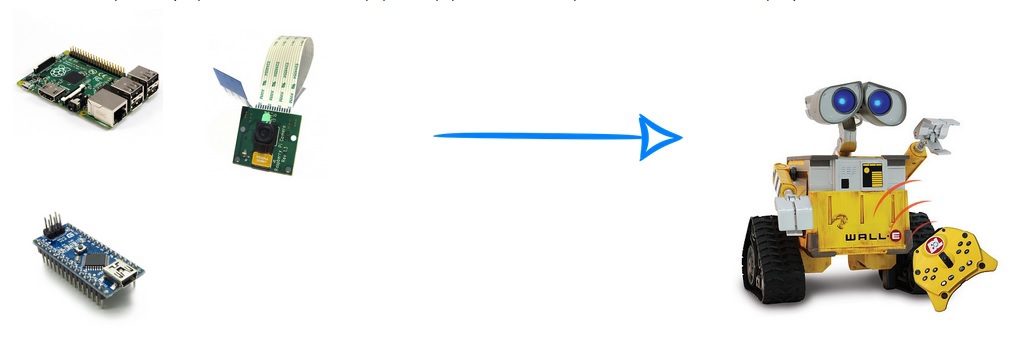
Очень часто на хабре появляются статьи о том как использовать Raspberry Pi как медиацентр, передвижную видеокамеру, удаленную web камеру и… собственно все. Очень странно, что в такой большой IT тусовке — довольно мало информации о том — как его программировать и использовать одноплатный компьютер там, где он действительно довольно полезен — во всяких встраиваемых системах, где есть ограничения по размеру и стоимости, но также есть потребность в производительности. В нескольких статьях постараюсь описать на примере создания мобильного колесного робота с компьютерным зрением — как можно использовать малинку для создания роботов(штук с интеллектом на борту, а не управляемых с андроида машинок с веб камерой).

Всегда было интересно программировать что то механическое — ощущаешь себя Богом(как и большинство программистов) — вдыхаешь в кучу деталей душу. Наверное все помнят ту детскую радость от первого мигания светодиодом, шевелящегося сервопривода и т.д. — когда сделал что то, что можно потрогать, что живет, двигается, а не сайтик на php.
Во многих своих творениях, а тем более роботах — человек всегда старается повторить самого себя, или часть своих функций. 80% информации об окружающем мире мы получаем через зрение — так что компьютерное зрение, на мой взгляд, одна из основополагающих областей знания в робототехнике.
Изучение ее я начинал с чтения академических трудов по алгоритмам параллельно с освоением библиотеки компьютерного зрения OpenCV на C++(в случае с Raspberry — Python)- знание принципов работы алгоритмов поможет Вам оценить сложность и выполнимость задачи, еще до начала ее выполнения, а также оптимизировать алгоритмы в критичных местах. Даже если Вы будете пользоваться в основном библиотечными функциями — они хорошо оптимизированы, и вряд ли вы с нуля напишете лучше — Вы сможете оптимизировать какие то параметры, которые незначительно влияют в конкретном случае на решение вашей задачи, но значительно влияют на скорость ее решения — в общем возвращаясь к холивару — «нужна ли программисту математика» — В данном случае нужна, так что советую напрячь немного извилины и разбираться хотя бы поверхностно в работе алгоритмов.
Также нелишне будет хотя бы поверхностно изучить Теорию Автоматического Управления — вместо расписывания ее возможностей — предлагаю просто посмотреть следующее видео (BTW — половина его команды — русские)
Составные части робота

Вряд ли у Вас под рукой окажутся 1 в 1 те же самые детали, что и у меня, если захотите повторить — поэтому буду описывать общую концепцию, а вы уж смотрите сами.
Механика
Механическая основа робота — двухколесная с дифференциальным приводом — классическая, в общем то, для первых робототехнических экспериментов — у нее 2 независимых колеса и ее движение контролируется исключительно скоростями и направлением их вращения (подобно винтам квадрокоптера). Кроме собственно колес имеется шаровая/колесная опора, в продвинутых системах — энкодеры для обратной связи и контроля текущей скорости двигателей, что позволяет более эффективно управлять двигателями.
Контроллер двигателей
В качестве контроллера двигателей можно использовать любой микроконтроллер, у меня используется Arduino nano — потому что просто попалось под руку.
Возможно возникнет вопрос — почему бы не управлять напрямую с Raspberry? Дело в том, что у оперционной системы квант времени гораздо больше, чем у микроконтроллера, кроме того нет аппаратных ШИМов, плюс, если мы захотим улучшить управление двигателями при помощи обратной связи и Теории Управления — это потребует вычислительных затрат и более быстрой реакции — поэтому управляющая двигателями часть и мозг робота разделены — arduino просто получает по UART команду — с какими скоростями и направлениями мозг бы хотел, чтобы крутились двигатели — как это будет достигаться — просто включением ШИМа с нужной скважностью или хитрым управлением, когда вначале мы подаем напряжение больше уставки, раскручивая двигатель, а потом выравниваем — таким образом ускоряя раскрутку двигателя до нужной скорости — все это уже заботы контроллера двигателей, а не Raspberry — поскольку это вообще говоря задача гораздо более жесткого времени — на порядок — два меньшего, чем позволяет Raspberry, да и вообще подобные системы.
Драйвер двигателей

Одной лишь ардуинки недостаточно, чтобы двигатели закрутились — ток, отдаваемый ножкой слишком мал — если мы на маленький выходной транзистор ножки контроллера посадим обмотку двигателя, требующего ток порядка ампер — то просто устроим КЗ — замкнем ключ сам на себя и он скорей всего просто выйдет из строя — поэтому нужен более мощный ключ, позволяющий пропускать через себя большой ток — если нам требуется крутить двигатель в одном направлении — в общем то нам достаточно одного транзистора, но если мы хотим крутить в разных — нам их уже потребуется 4 — такая схема называется H — мост — замыкая диагональные ключи при закрытых других диагональных — мы можем менять направление тока в двигателе.
И такая схема необходима для каждого колеса. К счастью в наше время нет нужды ее собирать — она реализована в виде интегральных микросхем, коих великое множество — так что, подойдет любая, способная управлять током, нужным вашему двигателю. У меня используется вот такой двухканальный от pololu:
Также имеется великое множество всевозможных шилдов для ардуин — при помощи гугла вы их легко найдете по запросу «arduino motor driver». Схему подключения также обычно предоставляет производитель или пользователи всевозможных форумов — ищущий да обрящет. У микросхем 2 питания — одно — которое подается на двигатели от мощного источника тока — например Li-Pol батарейки 7.2В, другое — питание входного каскада логики — ардуиновские 5В, также имеется входы, контролирующие направление вращения каждого канала и вход Enable — подавая на который ШИМ сигнал мы можем регулировать скорость вращения двигателя. Могут быть различные конфигурации в зависимости от шилда, но основные выводы — такие.
В общем то соединив таким образом Arduino, драйвер двигателей, двигатели и батарейку(или просто какой нибудь источник тока на длинном проводе) можете уже начинать играться с управлением моторами. Для получения команд от Raspberry потребуется реализовать прием строчки по UART и ее парсинг — протокол можете тут придумать какой вашей душе угодно. вышеперечисленное — основные части практически любого колесного робота — далее уже начинаются варианты — можете вообще забить на компьютерное зрение и сделать робота чисто на Arduino, который, например, ездит по линии, объезжает препятствия при помощи датчиков расстояния и т.п.
Главный контроллер

Моя же задача — сделать несколько более интеллектуальную платформу для ислледования компьютерного зрения и теории управления — так что следующим элементом системы будет являться одноплатный компьютер Raspberry Pi B+ в виду его невысокой цены, распространенности и доступности информации. В сборку Raspbian включен Python интерпретатор — так что писал программу для робота я на нем
Камера
В качестве камеры можно в общем то использовать любую вебку(что я первое время и делал) — у меня используется Raspicam — она небольшая, легкая, есть отдельный порт для ее подключения, широкий угол обзора хороший драйвер и 90 фпс в VGA разрешении.
Средство отладки

Для отладки я использую USB Wifi свисток, подключаясь к Raspberry через удаленный рабочий стол по SSH. Тоже в общем то можно использовать любой, для первоначальной настройки вообще можно использовать Ethernet кабель и SSH
Система питания
Аккумулятор — литий полимерный от 2Ач на 7.2В номинального напряжения + зарядка.
Понижающий DC-DC преобразователь — батарея наша выдает от 8.4 до 6В — это напряжение мы можем напрямую подавать на двигатели через микросхему драйвера, но для питания Raspberry и Arduino требуется 5В источник питания — по документации Raspberry Pi требуется источник 5В, способный отдавать не менее 800мА — можно конечно понизить напряжение с батарейного до 5В при помощи линейного стабилизатора, но при таких токах он будет греться и неэффективно использовать заряд батареи, так что я рекомендую использовать импульсный понижающий DC-DC преобразователь — от него у меня питается и Raspberry и Arduino
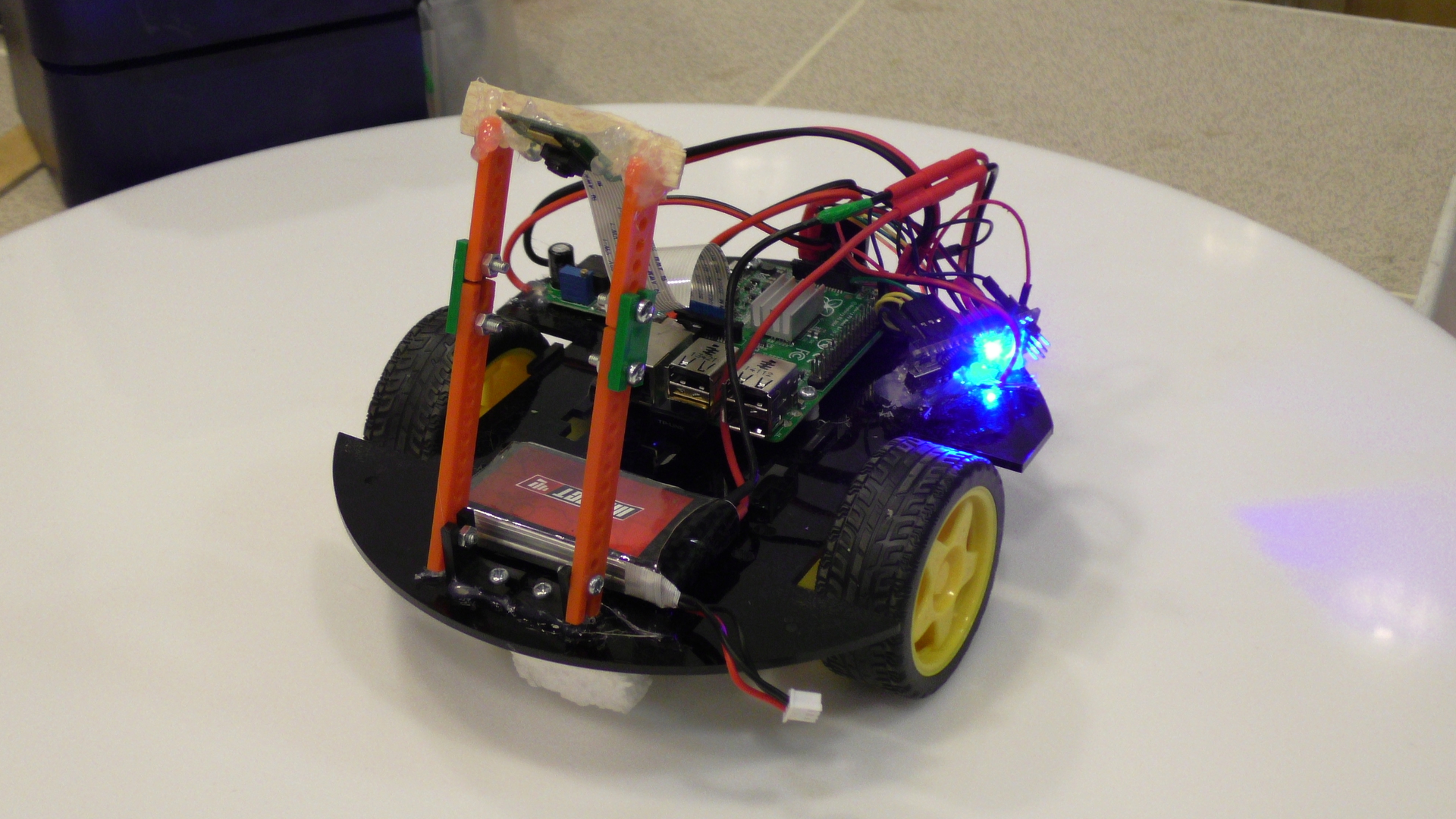
Собственно фото моего нанотехнологичного робота и пара видео его езды по различным соревновательным трекам в качестве демонстрации:
Линия профи(прерывистая)
В общем обзорная статья закончена — рассказал об основных используемых инструментах, далее уже будет более конкретно, а именно:
1.Введение
2.Первоначальная настройка Raspberry Pi + отладка по Wifi
3.Начало работы с OpenCV, Raspicam на Python
4.Управление роботом, ПИД регулятор, примеры
Вопросы, замечания, дополнения и пожелания по следующим статьям оставляйте в комментариях, очепятки и прочее — в личку
Работая с книгой, вы изучите основные навыки работы с электронными компонентами, научитесь вычислять количество энергии, которое потребуется вашему роботу, познакомитесь с основами программирования на языке Python и многое другое.
Книга написана создателем самого популярного в мире YouTube-канала, посвященного Raspberry Pi. В ней рассматривается конструирование игровых роботов на базе микрокомпьютера Raspberry Pi. В начале книги показано, как собрать и запрограммировать простого двухколесного робота. Затем базовая модель дополняется новыми функциональными возможностями: робот учится следовать по линии, избегать препятствия, распознавать объекты и цвет с помощью компьютерного зрения. Рассмотрены настройка Raspberry Pi, подключение внешних устройств (светодиодов, датчиков, тактовых кнопок) и написание программ на популярном языке Python. Уделено внимание основам электроники и особенностям сборки электрических схем на макетной плате. Книга богато иллюстрирована, написана простым языком и не требует от читателя предварительной подготовки.
С помощью этой книги вы быстро и легко пройдете путь от неопытного пользователя до настоящего конструктора роботов. Вы начнете со сборки макета двухколесного робота на базе миникомпьютера Raspberry Pi и запрограммируете его на популярном языке Python. Затем будете постепенно улучшать собранного робота, добавляя новые функциональные возможности: он научится следовать линиям, избегать препятствия, распознавать объекты и цвет с помощью компьютерного зрения.
- Управлять роботом удаленно с помощью пульта игровой консоли Wii компании Nintendo
- Применять датчики для обхода роботом препятствий
- Запрограммировать робота следовать по линии
- Настроить робота, чтобы он сиял огнями и воспроизводил звуки
- Наблюдать окружающий мир «глазами робота» с помощью видеокамеры Pi
Работая с книгой, вы изучите основные навыки работы с электронными компонентами, научитесь вычислять количество энергии, которое потребуется вашему роботу, познакомитесь с основами программирования на языке Python и многое узнаете о работе с резисторами, светодиодами, двигателями и датчиками, что позволит вам создавать уже более сложные конструкции.
Образовательный конструктор «ЛАБОРАТОРИЯ ЭЛЕКТРОНИКИ И ПРОГРАММИРОВАНИЯ микрокомпьютеров Raspberry Pi 4 на Scratch и Python» выполнен в виде мини-стенда, основу которого составляет рабочая пара из микрокомпьютера Raspberry Pi 4 и уникальной платы расширения Sense HAT (Hardware Attached on Top).

Образовательный конструктор «ЛАБОРАТОРИЯ ЭЛЕКТРОНИКИ И ПРОГРАММИРОВАНИЯ микрокомпьютеров Raspberry Pi 4 на Scratch и Python» выполнен в виде мини-стенда, основу которого составляет рабочая пара из микрокомпьютера Raspberry Pi 4 и уникальной платы расширения Sense HAT (Hardware Attached on Top).
Эта плата была разработана специально для космической миссии.
В рамках проекта Raspberry Pi Foundation платы Raspberry Pi и Sense HAT были доставлены на МКС на борту грузового корабля. С тех пор, как устройства достигли орбиты и начали работать на борту Международной космической станции, с их помощью стартовали различные эксперименты, предложенные школьниками и студентами из разных стран.
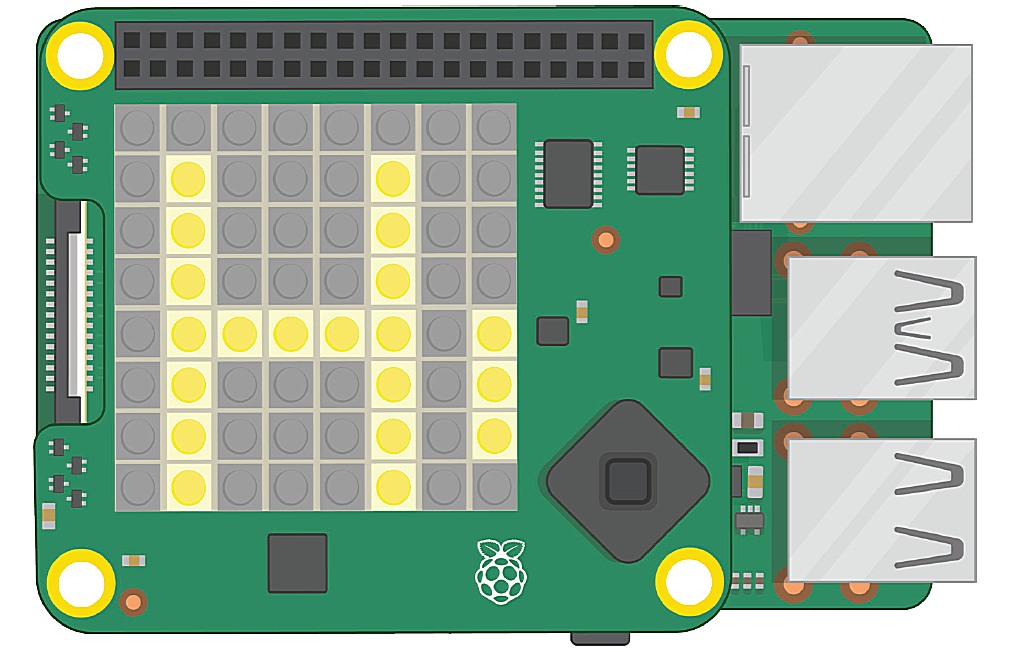

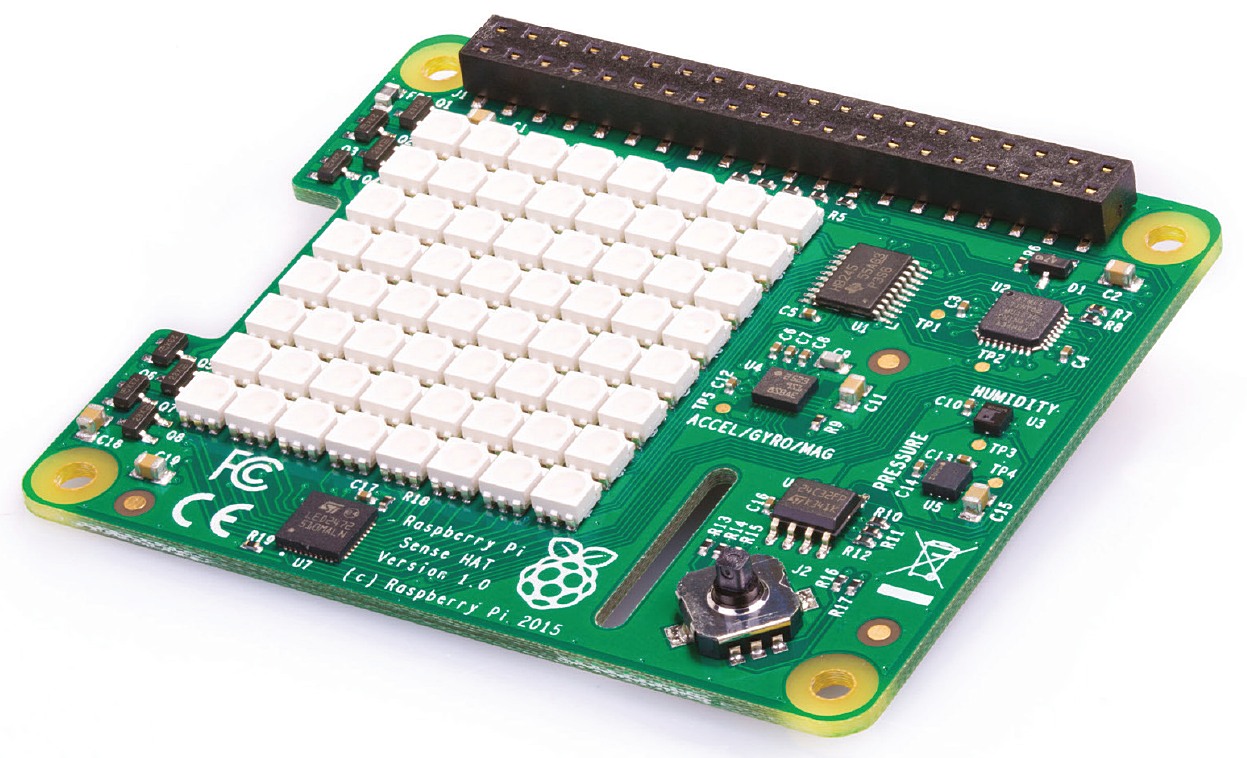
ОБЗОР ПЛАТЫ SENSE HAT
Sense HAT – мощная многофункциональная дополнительная плата для Raspberry Pi. Помимо светодиодной матрицы 8×8, состоящей из 64 красных, зеленых и синих программируемых светодиодов (RGB), цвет которых можно настроить для получения абсолютно любого оттенка, Sense HAT включает в себя пятипозиционный джойстик-контроллер и шесть бортовых датчиков.
Датчик положения (гироскоп): устройство, которое используется для определения изменения угла ориентации тела, получившего определение угловой скорости, отслеживающее направление гравитационного поля Земли – силы, которая притягивает вещи к земле, в центр планеты. Проще говоря, гироскопический датчик позволяет определить, что вы поворачиваете Sense HAT относительно поверхности Земли, и определяет скорость поворота.
Акселерометр: схож с предыдущим датчиком, но измеряет он уже не угловую скорость относительно поверхности Земли, а ускорение (силы тяжести) в различных направлениях. Совместив показания (данные) обоих датчиков, вы сможете отследить, в какую сторону и как быстро перемещается Sense HAT.
Магнитометр: прибор для измерения характеристик магнитного поля является еще одним датчиком, который помогает отследить перемещение Sense HAT. Измеряя естественное магнитное поле Земли, магнитометр может определить направление северного магнитного полюса. Этот датчик также можно использовать для поиска металлических предметов и даже для обнаружения электрических полей. Все три перечисленных датчика встроены в один модуль под названием ACCEL/GYRO/MAG, расположенный на печатной плате Sense HAT.
Датчик влажности: измеряет процент водяного пара в воздухе, известного как относительная влажность. Относительная влажность воздуха может колебаться от 0 %, если в нем отсутствует влага, и до 100 %, когда воздух полностью насыщен водяным паром. Полученные данные можно использовать для метеопрогноза.
Датчик измерения атмосферного давления: также известен как барометр, служит для измерения давления воздуха. Хотя большинство людей знают, что такое атмосферное давление из прогноза погоды, у барометра есть еще одно секретное применение: он может определить, спускаетесь вы с горы или поднимаетесь на нее, поскольку чем дальше вы удаляетесь от поверхности Земли, тем ниже падает давление, а воздух становится разреженным.
Датчик температуры: измеряет температуру окружающей среды, а также платы Sense HAT. Если вы используете чехол, то показания будут чуточку выше, чем вы могли бы ожидать. У платы Sense HAT отсутствует отдельный датчик температуры, поэтому в данном случае используются встроенные в датчики влажности и атмосферного давления. Программа способна использовать один или оба этих датчика сразу.
Для экспериментов с обработкой фото и видео, а также для процесса, известного в области робототехники как компьютерное зрение наш образовательный стенд оснащён видео-камерой.
Дополнительно конструктор комплектуется ресурсным набором электронных компонентов, необходимых для проведения новых экспериментов.
В качестве учебного материала конструктор комплектуется двумя замечательными книгами. Это «Raspberry Pi 4. Официальное руководство» и «Python для детей» (и не только).
Эти книги могут использоваться как учебный материал на занятиях по информатики в школе и ВУЗе. Конечно, каждый преподаватель устанавливает свои собственные приоритеты в обучении учащихся программированию. Если вы уже используете другой учебник в своей работе, то сможете использовать эти издания в качестве источника информации в дополнение к существующему учебнику.
Эти книги начинают обучение «с нуля», так сказать, являются прямым вхождением в языки программирования Scratch и Python, без необходимости наличия каких-либо навыков программирования.
Важным направлением в этой книге является объектно-ориентированное программирование (ООП). Наиболее важные концепции обсуждаются в книгах достаточно подробно. Еще одним направлением является игровое программирование.
В проектах используются все основные элементы словаря Python, а также наиболее важные графические компоненты библиотеки tkinter. Вы встретите большое количество задач по программированию.
В конце каждой главы есть несколько вопросов и задач. Эти упражнения не всегда просты, но они помогают освоить программирование. Решения задач можно найти в папке с файлами примеров. Их можно просмотреть в текстовом редакторе или распечатать на принтере.
Читайте также: