
Программное обеспечение lego mindstorms nxt
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.

Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.

Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.

Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.

Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках

Рисунок 4 — Окно Connections

Рисунок 5 — Окно Data Connections

Рисунок 6 — Законченный вид диаграммы

2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.

Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,
Robot Commander представляет собой управляющее приложение для LEGO® MINDSTORMS®. БЕСПЛАТНАЯ загрузка для большинства смартфонов и планшетов; Robot Commander подключается к модулю EV3 по Bluetooth®. Это простое в использовании приложение позволяет взаимодействовать с вашими уникальными роботами EV3, даже не подключаясь к компьютеру! Это означает, что вы можете мгновенно начать игру с вашими собственными роботами!

Приложения для компьютеров и планшетов
Приложения LEGO® MINDSTORMS® EV3 Home для macOS, Windows 10 и планшетов на iOS и Android
Загрузите, установите, подключите и выполняйте задания по программированию. Для пяти основных роботов есть до пяти задач по программированию. Благодаря более продвинутому, но хорошо знакомому интерфейсу программирования и пяти сложным заданиям для вас и ваших роботов-героев, приложение EV3 Home для PC, Mac и планшетов сможет поднять ваши навыки робототехники на новый уровень!
Важная информация относительно программного обеспечения и приложений LEGO® MINDSTORMS® EV3!
Мы рады сообщить, что пользователям LEGO MINDSTORMS EV3 теперь будут доступны новые возможности при сборке и программировании их творений.
Новое приложение LEGO MINDSTORMS EV3 Home с языком программирования на основе Scratch заменит используемое в настоящее время ПО LEGO MINDSTORMS EV3 Home Edition (Labview) для Windows 10 и macOS, а также приложение LEGO MINDSTORMS EV3 Programmer для планшетов на iOS/Android.
Приложение LEGO MINDSTORMS EV3 Programmer будет удалено из магазинов приложений в конце июня 2021 года.
Выведенное из эксплуатации ПО LEGO MINDSTORMS EV3 Home Edition (Labview) для Mac и PC можно найти ниже. Обратите внимание, что это ПО больше не поддерживается LEGO Group.
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.
Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это сжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это сообщать спецслужбам держать зла.
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.
Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.
Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.
Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках
Рисунок 4 — Окно Connections
Рисунок 5 — Окно Data Connections
Рисунок 6 — Законченный вид диаграммы
2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.
Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,

Лет эдак в 10-11, после долгих и беззаботных лет игры с контрукторами Lego, я узнал о существовании великолепного набора Mindstorms, который позволял создавать самых настоящих роботов без специализованных знаний электроники, электротехники и даже программирования. Я сразу же заинтересовался данной серией, но тогда моим мечтам обладать Mindstorms по различным (в основном — финансовым) причинам не суждено было сбыться.
Сейчас мне 20 и в честь юбилея друзья (спасибо им!) решили окунуть меня назад в детство и таки дать возможность полепить собственных роботов. Правда, в этот раз всё будет серьёзнее, чем в моих детских мыслях — мы будем действительно программировать Mindstorms под Debian GNU/Linux.
Неплохо, да?
Собственно, данный робот и будет нашей основной тестовой моделью. Но мы попробуем немного усовершенствовать его навыки. И для этого мы напишем небольшой кусочек кода.
Действительно. Идущее в комплекте ПО работает только в Windows и Mac OS. А у нас, внезапно, Debian Squeeze. К счастью, Mindstorms обладает огромным сообществом фанатов, которые придумали решение данной проблемы — использование альтернативного ПО для программирования роботов, в частности Bricxcc (здесь выложен полнейший мануал по настройке всего и вся).
А теперь немного теории — в программировании Mindstorms, как правило, помимо визуального среды ROBOLAB для Windows и Mac OS используется язык RCX, однако среди фанатов одним из наиболее популярных языков является достаточно простой NXC (Not eXactly C). Простая программа на NXC выглядит примерно так:
- task music()
- int lastTone=5000;
- while ( true )
- int tone= Random (5000)+500;
- int duration= Random (500);
- PlayTone(tone,duration);
- Wait(duration);
- >
- >
- task main()
- start music;
- while ( true )
- /* Determine Next Action */
- unsigned int duration= Random (5000);
- unsigned int motorSpeed= Random (100);
- unsigned int syncMode= Random (3);
- /* Display Next Action */
- ClearScreen();
- NumOut(0,LCD_LINE1,duration);
- NumOut(0,LCD_LINE2,motorSpeed);
- NumOut(0,LCD_LINE3,syncMode);
- /* Perform Next Action */
- switch (syncMode)
- case 0:
- OnFwdReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 1:
- OnRevReg(OUT_AC,motorSpeed,OUT_REGMODE_SYNC);
- break ;
- case 2:
- OnFwdSync(OUT_AC,motorSpeed,-100);
- break ;
- case 3:
- OnRevSync(OUT_AC,motorSpeed,-100);
- break ;
- >
- Wait(duration);
- >
- >
Для справки — данная программа заставляет «танцевать» нашего робота под нечто, напоминающее музыку.
Не буду спорить, программа совсем не сложна для понимания, но достаточно громоздка. И её можно заметно упросить, используя вместо написания кода на NXC специальный конвертер PyNXC. Иначе говоря, мы будем писать код на Python'е, а PyNXC будет преобразовывать его в NXC-код и загружать на устройство, избавив нас от необходимости писать громоздкий код на подобии Си.
Ну, а теперь, собственно, напишем на Python'е программу для путешествия нашего робота среди прозрачных чашек, но используя более грамотный алгоритм разворота:
Теперь наш робот научился разворачиваться на месте и, как только мешающий объект пропадет с поля его зрения, продолжать движение вперед.
Как вы уже, наверное, заметили, программировать Mindstorms очень просто. Стоит также сказать, что помимо NXC и Python с использованием PyNXC, можно писать код на Java, Lua, Ruby, Ассемблере, а также, что логично, использовать ассемблерные вставки в других языках.
Благодаря всему этому Mindstorms из детской игрушки превращается в весьма мощную штуку, позволяющую создавать сложные и «умные» механизмы, как например вот эта гитара:
Смотрите стоимость монтажа скс тут.
Когда мне привезли роботов ЛЕГО 8547 и нетбуки I-RU с лицензионной операционной системой WINDOWS 7 Starter я обрадовался. Подумал как замечательно и лицензионная винда и роботы и ПО к комплекте.
Но радость моя продлилась не долго, начал я устанавливать драйвера - без проблема, а вот графическую среду программирования NXT-G установить не удалось. И что, как говорится, я только не делал: и от имени администратора устанавливал, и скидывал весь диск в качестве образа, и пытался виртуальную среду развернуть.

- друг ты мне или враг 7-ой виндовз?
"Этот продукт не поддерживает Windows Starter Edition. Обратитесь к документации по операционной системе" говорит всем виндовс.
Понятно, что в будущем разработчики выпустят нормальный инсталлятор и на этой ОС NXT-G будет установлена нормально, но а сейчас то что делать? Не получилось. Расстраиваться я не думал. Быстро, в течении 2-3 дней переустановил винду на windows XP SP3. Поставил ПО и работаю по сей день преподавателем программирования Lego-роботов с учениками. А вот недавно в Интернете нашёл на одном из англоязычном сайте информацию, что всё таки можно установить NXT-G на 7-ку.
Подробненько описываю что для этого нужно делать. Для установки программного обеспечения NI на Windows 7 Starter Edition, выполните следующие действия:
1. Скопируйте все файлы компакт диска в корневую папку флэшки или любого другого устройства, поддерживающего изменение данных (жёсткий диск, USB-диск и т.д.);
2. Войдите в папку программы, которую Вы хотите установить. Откройте в любом текстовом редакторе, например, в блокноте файл setup.ini. Если необходимо установить несколько программ, то менять setup.ini придётся в каждой программе.
3. Измените файле Setup.ini в разделе [ОS], добавив строку AllowWindowsStarter = 1 как показано на рисунке ниже. Сохраните и закройте файл.
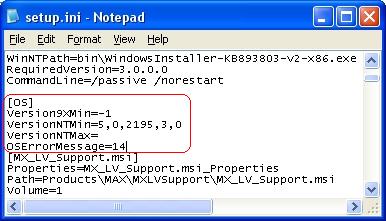
до изменения
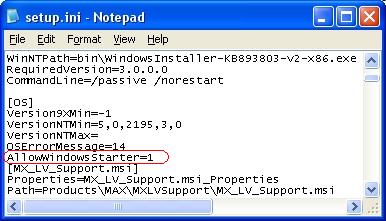
после изменения
4. Запустите инсталляцию NXT-G в той папке, где Вы сейчас внесли изменения.
![]()
Что такое NXT?

NXT Блок

По умолчанию тестовые программы NXT и многие примеры программ предполагают, что датчики подключены к следующим портам:
- Порт 1: Датчик касания
- Порт 2: Датчик звука - микрофон
- Порт 3: Датчик освещенности
- Порт 4: Ультразвуковой датчик
- Управляемый компьютером, интеллектуальный LEGO® блок NXT - мозг робота, созданного на основе конструктора LEGO MINDSTORMS® Education.
- Датчики касания.
Позволяют роботу реагировать на окружающие его препятствия. - Датчик звука - микрофон.
Позволяет роботу реfгировать на уровень громкости звука. - Датчик освещенности.
Используя жатчик, робот может реагировать на изменеия освещенности или цвета. - Ультразвуковой датчик.
Позволяет роботу определять расстояние до объекта и реагировать на движение. - Подключение датчиков.
Датчики могут быть подключены к любому из входов с номерами 1-4 любыми кабелями за исключением специальных кабелей-переходников.
- NXT Блок
- Аккумуляторная батарея.
Обеспечивает питание NXT. - Лампы.
Подключите и запрограммируйте лампы в качестве сигнальных огней, подсветки датчика освещенности или просто ради интереса. - Кабель-переходник.
В базовый набор входят три ламры и три кабеля-переходника. - Соединительные кабеля.
Подключение моторов и ламп
Моторы или лампы могут быть подключены к выходным портам A, B, или C. По умолчанию тестовые программы NXT и некоторые примеры программ преполагают, что двигатели подключены следующим образом:
- Порт A: Мотор или лампа для дополнительной функции.
- Порт B: Двигатель привода (часто) левого колеса двух-моторного шасси.
- Порт C: Двигатель привода (часто) правого колеса двух-моторного шасси.
Технические характеристики NXT
Аккумулятор
Аккумулятор крепится снизу NXT. Для его установки сначала снимите крышку батарейного отсека, нажав пальцем на защелку. Откроется отсек для 6 батареек АА типа. Вместо крышки отсека можно установить литий-ионовый полимерный аккумулятор, которым комплектуется конструктор 9797. Вставьте боковой выступ на корпусе аккумулятора в специальный паз батарейного отсека и легким нажатием до щелчка зафиксируйте его.

Снятие крышки батарейного отсека

Для зарядки аккумулятора вотните провод зарядного устройства в круглый разъем в корпусе аккумулятора через отверстие в корпусе NXT (этот разъем расположен под входными портами). Сам трансформатор зарядного устройства воткните в сеть 220 В. Аккумулятор можно заряжать и отдельно от NXT.
- Зеленый индикатор загорается при подключенном к аккумулятору зарядном устройстве.
- Красный индикатор горит в процессе зарядке и гаснет после ее окончания.
- Для полной зарядки аккумулятора необходимо около 4-х часов.
- NXT можно использовать во время зарядки аккумулятора, время зарядки при этом увеличивается.
- Аккумулятор допускает до 500 циклов зарядки.

Подключение зарядного устройства

При первом использовании аккумулятора совместно с NXT перед началом работы подключите зарядное устройство на 20 минут. Поступите аналогичным образом и в случае полного разряда аккумулятора. Перед использованием аккумулятора его следует зарядить.

Другие типы батареек
NXT может работать и от 6 AA/LR6 батареек
- Рекомендуется использовать алкалиновые батарейки
- Мрожно использовать аккумуляторы AA/LR6 типа, однако, в этом случае потребляемая мощность может упасть.
Разряд батареи


Меры предосторожности
- Никогда не используте батарейки разного типа в NXT.
- Перед длительным хранением извлекайте батареики.
- Полностью разряженные батарейки стразу извлекайте из NXT.
- Заряжайте аккумулятор под наблюдением взрослых.
- Никогда не пытайтесь зарядить батарейки обычного типа (не акуумуляторы).
Rising Force Online » Обои из игр
Читайте также: