
Моделист конструктор модель вертолета
Радиоуправляемые модели вертолетов находят все большее признание среди спортсменов. Это понятно - класс, лишь недавно узаконенный международной Федерацией авиационного спорта, стал развиваться необычайно высокими темпами, а зрелищность выступлений моделистов-вертолетчиков сделала его еще более популярным. Немаловажное значение имеет и то, что радиоуправляемые винтокрылы по праву считаются наиболее сложными из всего семейства радиоуправляемых. А ведь как порой хочется попробовать свои силы именно в работе над самым трудным!
Притягательность микровертолетостроения - и в уникальных летных свойствах современных аппаратов с несущим воздушным винтом. Достаточно сказать, что сегодня на чемпионатах в летных комплексах наибольшее число фигур - высшего пилотажа!
В нашей стране новый вид моделизма пока только зарождается. Но он упорно пробивает себе дорогу, несмотря на нехватку хорошей аппаратуры. Спортсмены ищут и находят необычные решения, позволяющие сделать создание винтокрылов доступным многим. Тем, кто не располагает пока нужной аппаратурой, мы представляем интереснейшую разработку - кордовую модель вертолета, полный аналог радиоуправляемого варианта. О ней рассказывает руководитель авиамодельной лаборатории КЮТ «Искра» города Куйбышева Н. Стукало.
После многочисленных экспериментов с резиномоторными и электрическими вариантами (последние летали на кордах, питание двигателей - внешнее) стало ясно: спроектировать и изготовить кордовый вертолет, являющийся аналогом радиоуправляемого, с двигателем внутреннего сгорания - дело вполне доступное. Такая машина может послужить в качестве отладочной для отработки различных узлов микровинтокрыла, для ресурсных испытаний механизмов. Она поможет и приобрести необходимые навыки управления, познать особенности поведения необычной модели. Принималось во внимание и то, что научиться управлять вертолетом в двух измерениях несравненно проще, чем в трех - при радиоварианте.
Еще на этапе проектирования мы учитывали возможность простейшей переделки кордовой в радиоуправляемую после проведения всего комплекса тренировок и отладок. С приобретением навыков пилотирования и ознакомления с основными характеристиками и возможностями модели это становилось оправданным и логичным продолжением программы освоения сложнейшей ступеньки авиамоделизма.
Исходным прототипом стал вертолет Белл-212. Изменения коснулись лишь шасси и хвостового костыля - их размеры пришлось увеличить.
Тем, кто соберется построить такую же модель, советуем прежде всего внимательно ознакомиться с предлагаемыми рисунками и изучить работу узлов и механизмов. Размеры силового блока и редукторов могут быть изменены, главное - сохранить принцип работы элементов.
ОСНОВНЫЕ ДАННЫЕ МОДЕЛИ
Диаметр несущего ротора, мм - 1164
Диаметр хвостового винта, мм - 234
Полетный вес, кг - 4,1
Максимальная скорость, км/ч - 80
Фюзеляж. Сначала изготавливается болванка из пенопласта марки ПС-4, разрезается по плоскости симметрии, облегчается изнутри, с тем чтобы в последующем уменьшить расход растворителя при «вытравливании» пенопласта из выклейки фюзеляжа. После нанесения разделительного слоя (мыло) болванку обтягивают на эпоксидной смоле двумя слоями толстой стеклоткани. Дождавшись отверждения смолы, заготовку вышкуривают до получения ровной поверхности. Далее идет наложение слоя тонкой стеклоткани и окончательное вышкуривание. Последнюю операцию проводят с керосином. Со стороны хвоста вырезается отверстие, куда заливают ацетон. Поворачивая фюзеляж, частично растворяют пенопласт и выливают растворитель из выклейки. Остатки соскабливают после снятия по разрезу верхней части кабины. Полученную выклейку-«скорлупку» усиливают изнутри полосками стеклоткани в местах повышенных нагрузок. Других дополнительных усилений типа переборок и шпангоутов фюзеляж не имеет.
В соответствующих местах на днище на клею устанавливают опорные грибки, образованные слоями толстой стеклоткани. В передней нижней части фюзеляжа вырезается круглое отверстие для ввода в зацепление пускового маховика. Справа в борту сверлится отверстие Ø7-8 мм под отвертку (для затяжки стопорного винта). Винт фиксируется пружиной, препятствующей самоотворачиванию. Вверху фюзеляжа устанавливается корпус подшипников вала несущего ротора, далее просверливаются четыре отверстия Ø6 мм в опорных грибках под крепление основания силового блока и рессоры шасси.
Законченный, отделанный и окрашенный фюзеляж весит вместе со стабилизатором из пенопласта ПС-1-100 около 800 г. Вместо остекления кабины применена крупноячеистая металлическая сетка, что значительно улучшает охлаждение двигателя.
Механика привода. Главный редуктор привода несущего винта образован парой косозубых шестерен. Ведущая - стальная Ø20,07 мм - имеет 13 зубьев. Ведомая сделана из текстолита, у нее 103 зуба высотой 2,5 мм, ее Ø156,5мм. Передаточное отношение редуктора 1 : 8.
Редуктор задней передачи - пара конических шестерен, передаточное отношение 1 : 4. Редуктор хвостового винта состоит также из пары «коничек», однако здесь они имеют одинаковое число зубьев. Он установлен сверху киля и прикрыт кожухом. Необходимо обеспечить точный монтаж всех редукторов и плотный контакт зацеплений зубчатых пар, чтобы исключить биения и вибрации и обеспечить надежную работу механики привода.
Силовой блок образован основанием и двумя пластинами моторамы. Между собой эти детали связаны дюралюминиевыми уголками. Аналогично монтируются и пластины крепления верхнего корпуса подшипников вала ротора. Все соединения на винтах МЗ.
Силовая установка состоит из двигателя МДС-6,5 КУ, удерживаемого на боковых пластинах моторамы дюралюминиевыми уголками. На вал мотора насаживается конусная разрезная втулка и ведущая шестерня с ответным конусным отверстием. Затем на штифты Ø2,5 мм напрессовывается маховик и узел затягивается штатной гайкой двигателя. Его запуск осуществляется с помощью второго, отсоединяющегося после запуска пускового маховика, имеющего три выступающих винта. При разгоне двигателя они углубляются в пазы основного маховика, а затем выходят из зацепления.
Муфта сцепления. По принципу работы она отличается от конструкций, применявшихся до сих пор на моделях вертолетов. Действие муфты как бы двухэтапное. На самых малых оборотах двигателя за счет центробежных сил фрикционный элемент прижимается вкладышем к внутренней стенке ведомого барабана. За счет сил трения вращающий момент передается далее, и идет раскрутка несущего винта до оборотов, примерно равных оборотам большой ведомой шестерни вала ротора. Проскальзывание муфты на этом этапе смягчает условия разгона несущего винта, работы самого двигателя и включения второй «ступени» муфты. Оно происходит при увеличении частоты вращения коленвала мотора - основные фрикционные элементы, преодолевая сопротивление резинового кольца, садятся на ведомый барабан и обеспечивают «мертвое» сцепление. А при остановке двигателя муфта мгновенно выходит из «зацепления» и обеспечивает свободное вращение несущего винта. Регулировку проще всего провести на токарном станке, задавая различные обороты.
По конструкции такая двухступенчатая муфта не сложнее обычной и позволяет допустить значительные рабочие зазоры. Она состоит из корпуса, двух фрикционных элементов (один притягивается к центру вращения резиновым кольцом) и ведомого барабана с внутренним фрикционным вкладышем (последний заклеивается на эпоксидной смоле). Ведомый барабан фиксируется на валу упорным винтом М6, который одновременно служит для крепления ведущей конической шестерни задней передачи. В оба фрикционных элемента ввинчиваются для утяжеления обрезки болтов М6, после чего проводится балансировка ведущей части муфты.
Втулка ротора упрощенной конструкции, с осевым шарнирам без шарикоподшипников. При ее изготовлении и сборке важно добиться плотных резьбовых соединений, соосности вращающихся деталей, отсутствия люфтов. Несмотря на упрощенность, подобная втулка выдержит множество полетов. В местах крепления лопастей она фрезеруется под углом 4,5 °.
Автомат перекоса и другие элементы по устройству и принципу действия аналогичны используемым на модели, чертежи и описание которой были опубликованы в «М-К» N° 3, 4 и 6 за 1984 год. Автомат перекоса на предлагаемом микровертолете необходимо повернуть на 6 ° влево (если смотреть по полету) при виде сверху. Лопатки стабилизирующего ротора изготавливаются из бука и оклеиваются тонкой стеклотканью. После балансировки они с помощью заклеенных резьбовых втулок навинчиваются на концы штанги Ø3,5 мм.
Хвостовой (рулевой) винт. Его лопасти вышкуриваются из бальзы средней плотности. В комлевые части вклеены буковые клинья. Установочные углы атаки лопастей изменяются при перемещениях ползуна с коромыслом, связанного тягами с самими лопастями. Ползун скользит по валу Ø4 мм рулевого винта и контрится в требуемом положении двумя винтами М2. Поворотная ось лопасти - винт М3. Ориентировочные углы установки лопастей около 12°-15°,окончательно уточнить значения углов можно на вращающееся столике, где за шасси укрепляется микровертолет с работающим двигателем. Во время этих работ необходимо открывать заслонку карбюратора как можно более плавно - только тогда удастся составить правильное представление о полноте парирования момента вращения несущего ротора.
Корпус хвостового редуктора крепится на киле через наружную дюралюминиевую пластину винтами М3,5. На гибкий вал привода винта надета резьбовая втулка с прорезью под загиб и резьбу М4, после чего конец вала изогнут на 90°. Затем детали туго навинчиваются на вал ведущей шестерни хвостового редуктора. Передний же конец гибкого вала заделывается с помощью штифта.
ПОРЯДОК СБОРКИ МОДЕЛИ
Полностью смонтированный силовой блок в сборе с гибким валом вставляется в фюзеляж. При этом вместо вала используют стержень такого же диаметра, длиной, равной высоте силового блока. Через хвостовую часть фюзеляжа пропускают прочную нить и привязывают ее к концу гибкого вала. Потянув за нить, проталкивают узел привода в фюзеляж до появления связки в киле. Затем до упора навинчивают ведущий вал хвостового редуктора на резьбовую втулку. Передвигая узел привода обратно, добиваются совпадения крепежных отверстий и наживляют крепежные элементы. Снизу вставляется до упора в нижний подшипник главный вал ротора, при этом он выталкивает технологический стержень. Проверяется выкос оси вращения несущего ротора влево. Угол должен быть равен 1,5°-2°, что обеспечит надежное натяжение корд.
Вал ротора фиксируется винтом, подход к которому возможен через технологическое отверстие в выклейке фюзеляжа. С помощью дюралюминиевых резьбовых втулок основание силового блока стягивается с рессорами шасси. Съемная кабина крепится металлическими язычками и быстроразъемными защелками.
Топливный бак (полиэтиленовый флакон объемом 200 см 3 рассчитан на 10 мин полета) обвертывается поролоном и монтируется в фюзеляже на проволочных крючках. В борту сверлятся четыре отверстия Ø1 мм для выхода тросиков управления с соединительными карабинами на концах.
После сборки модели можно устанавливать лопасти несущего ротора. Их изготовление требует нескольких уточнений.
ОТЛАДКА И ОБЛЕТ
С заведенным двигателем модель вертолета ставится на испытательный стенд - проверяется отсутствие биений лопастей ротора. При необходимости их положение корректируют. Стенд поможет еще раз убедиться и в полном гашении реактивного момента. Затем начинают летные испытания. Первые старты проводят только в безветренную погоду. Перед каждым полетом необходимо удалить зрителей на безопасное расстояние.
Взявшись за ручку управления, контролируют работу автомата перекоса. Он должен отклоняться вперед-назад на 15 . Проверяется надежность управления карбюратором при повороте качалки на ручке указательным пальцем правой руки (иные варианты управления «газом» для кордовой модели вертолета не подходят).
Установив заслонку карбюратора на самые малые обороты двигателя, запускают его. Питание калильной свечи пока не отключают, так как без «подкала» мотор может заглохнуть. Как только пилот прибавит «газ» и включится вторая «ступень» сцепления, питание свечи можно отключить (для оперативности действий с аккумулятором лучше сделать отводы от свечи к бортовому штекеру). Помощник сразу же отходит в безопасное место. Тем временем двигатель прогревается. Чуть прибавив «газ», смотрят за поведением модели. При необходимости останавливают мотор и проводят подрегулировку. Если все нормально, выполняют взлет.
Надо отметить, что управление вертолетом можно доверить только человеку, имеющему достаточный опыт пилотирования обычных кордовых. Поначалу осваивают более привычный режим - горизонтальный полет.
Для взлета прибавляют «газ» до почти полной разгрузки модели и слегка отклоняют автомат перекоса вперед. Модель сразу же перейдет в набор скорости. Набрав ее, она сама легко отделится от земли - ведь для горизонтального полета требуется несколько меньшая мощность, чем для режима висения на месте.
Проведя микровертолет несколько кругов на высоте 0,3-0,4 м, его сажают, чуть-чуть сбросив «газ» двигателя. Модель сама приземлится и немного прокатится по инерции. Маневр повторяют несколько раз при включенном моторе, чтобы закрепить навыки управления на этих режимах.
В дальнейшем и регулировка «газа» в соответствии с изменениями скорости войдет в привычку. А пока важно не увлечься управлением по тангажу, чтобы, забыв про постоянно меняющиеся требования к мощности, случайно не дать модели «провалиться».
Безусловно, необходим и постоянный контроль за временем работы мотора в каждом полете. При случайном его отказе на большой скорости модель сажают на режиме планирования с незначительной высоты - только так можно обойтись без поломок. Пилотирование на режиме висения сводится, по сути, лишь к точному манипулированию рычажком «газа» и корректировке тангажа. Более стабильное висение происходит на высотах, равных 1,5 диаметра ротора, вне влияния воздушной подушки. Освоив и этот режим, переходят к взлетам и посадкам с места и к полетам в обратную сторону (хвостом вперед).
Рис. 1. Кордовая модель вертолета: 1 - резиновая лента фиксации бака, 2 - топливный бак, 3 - линия отъема кабины, 4 - автомат перекоса, 5 - костыль (ОВС Ø2,5 мм), 6 - лыжа (Д16Т, труба), 7 - съемная кабина, 8 - металлическая сетка, 9 - хомут (сталь), 10 - вилка подвода напряжения к калильной свече от аккумуляторов, 11 - втулка ротора, 12 - фюзеляж (стеклопластик), 13 - лопасть несущего ротора, 14 - стабилизатор, 15 - тросики управления, 16 - растяжка рессоры (алюминиевая проволока), 17 - переходник (стеклопластик), 18 - штанга управления (Д16Т, труба Ø14 мм), 19 - рессора.
Рис. 6. Схема управления: 1 - шаровой шарнир, 2 - тяга (ОВС Ø 2 мм), 3 - крючок (сталь Ø1 мм), 4 - стяжная пружина, 5 - соединительная муфта тяг (латунь), 6 - тяга управления тангажом. 7 - тяги привода качалок (ОВС Ø1,2 мм), 8 - качалка управления тангажом (Д16Т), 9 - тяга управления дросселем (ОВС Ø2 мм), 10 - качалка управления дросселем, 11 - стопорный винт МЗ тяги автомата перекоса.
Рис. 7. Ручка управления: 1 - карабины (ОВС Ø1,5 мм), 2 - ручка (фанера 10 мм), 3 - резиновое кольцо возврата качалки, 4 - «клавиша» качалки, 5 - качалка управления дросселем.

Вертолёт — винтокрылый летательный агрегат, у которого необходимые для полёта подъёмная сила и тяга создаются одним или несколькими несущими винтами (пропеллерами) с приводом от двигателя или нескольких двигателей. Почти что всякий раз несущий винт вертолёта оснащён автоматом перекоса, который обеспечивает перемещение центра давления винта для управления полётом (исключение кое-какие схемы с 3-мя и более несущими винтами).
В случае единственного приводного несущего винта обязательным является механизм для гашения его вращающего момента (чаще всего рулевой винт или фенестрон, реже струйное устройство и др.), а в многовинтовых схемах вращающий момент как правило компенсируется противовращением несущих винтов. В случае если винт приводится во вращение реактивными двигателями, закреплёнными на самих лопастях, вращающий момент почти что не заметен и свободно компенсируется аэродинамическими рулями. Для разгрузки несущего винта на большой скорости вертолёт может оснащаться достаточно развитым крылом, для увеличения путевой устойчивости может в свою очередь применяться и оперение.
Главным достоинством является способность осуществлять взлёт и посадку по вертикали, долго зависать в воздухе и передвигаться в любом направлении. Режим авторотации (свободного вращения несущего винта, подобен парашютированию) в нормальном полёте невозможен (в отличие от автожиров и винтокрылов). Приземление в режиме авторотации выходит управляемой, но считается аварийным режимом: установившаяся скорость снижения у лёгких вертолётов от 5 м/с, а у тяжёлых до 30 м/с и более, — без резкого «затяжеления» винта перед столкновением с землёй такая посадка мало отличается от падения. Главный недостаток характерный всей винтокрылой технике — не очень высокая скорость полёта и повышенный (по сравнению с самолётами) расход горючего.
Первые идеи
Известны проекты различных летательных аппаратов, не являющиеся вертолётами, начиная с летательного аппарата Леонардо да Винчи (1475 год) и далее до, например, автожира Хуана де ла Сиервы (1920 год).
Мы — давние и постоянные подписчики журнала «Моделист-конструктор». Для нас — впрочем, как и для всех тех, кто связал свою жизнь с техникой,— журнал всегда был своего рода информационным родником, снабжавшим живительной информацией по интересующим нас вопросам. А интересы наши всегда концентрировались на любительских сверхлегких летательных аппаратах: мы всегда самым внимательным образом исследовали новинки самодеятельных авиаконструкторов, и в первую очередь винтокрылые машины — автожиры и вертолеты.
Правда, «Моделисту-конструктору» о такого рода технике в последние годы рассказывать практически не доводилось. Дело в том, что самодеятельные авиаконструкторы крайне редко берутся за создание мини-вертолетов, а тех, что в конце концов доходят до «летных» образцов,— буквально единицы. Тем не менее все это не остановило нас, когда мы все же решили взяться за создание сначала автожира, а затем и геликоптера.

К сожалению, надежной и достаточно точной методики расчета несущего винта нам найти не удалось. Поэтому для начала спроектировали стенд для отработки несущих винтов-роторов. В процессе изготовления он усложнялся, «обрастал» механизмами, системами и узлами — и в итоге получился вертолет НГУ-3, который можно видеть здесь на чертежах и фотографиях. От стенда осталось лишь название нашей машины, которое расшифровывалось как «Натурная Геликоптерная Установка-3».
Автором проекта вертолета является инженер-технолог С. Комиссаров. Немало сил и времени уделил созданию машины автор этих строк, руководитель авиамодельной лаборатории Станции юных техников города Ликино-Дулево; в работе принимали участие также сотрудники и учащиеся ликино-дулевского техникума Ли-ДАМТ при вполне доброжелательном отношении к нашей деятельности руководства и техникума, и городской Станции юных техников.
Итак, вертолет. Метод проектирования мы выбрали самый простой — его можно назвать статистическим. Иначе говоря, были изучены аналогичные вертолеты такого типа, и на основании анализа их конструкций с учетом параметров имевшегося у нас силового агрегата, а также материалов и технологий, которыми мы располагали, и был разработан наш винтокрылый аппарат. Кстати, силовой агрегат — 500-кубовый двигатель ESO-500, без которого наша работа вряд ли имела бы смысл, был подарен нашей группе местным меценатом, за что громадное ему спасибо.
Большая часть агрегатов вертолета сделана самостоятельно. Да и «пилотировали» машину во время испытаний мы также сами. Она совершала рулежки по земле, а также с использованием специального стенда совершала устойчивые подлеты на высоту 1…2 метра. Стенд представлял собой устройство типа «колодезный журавель», исключающее развороты и опрокидывание вертолета. Управление им на стенде позволяло постепенно увеличивать число степеней свободы машины и тем самым постепенно совершенствовать навыки управления аппаратом. Главное здесь было — обеспечить безопасность этого процесса, поскольку никому из нас раньше пилотировать вертолет не приходилось.
Несколько строк о технических характеристиках НГУ-3. Так, взлетный вес аппарата составляет 250 кг; диаметр несущего винта-ротора — 6 м; профиль лопасти — CLARK-Y — 10%; мощность двигателя — 35 кВт (48 л.с.). Управление ротором — с помощью ручки типа «шаг-газ», изменение направления вектора тяги — непосредственное. Автомат угла установки лопастей — центробежного типа, расположен над втулкой несущего винта. Аппарат цельнометаллический, собран из дюралюминиевых (Д16Т) профилей (труб, «уголков») и листового материала. Несущие лопасти деревянные (ель), обтянутые стеклотканью с использованием эпоксидного связующего. Редуктор комбинированный, открытого типа. Фрикцион сухого типа, дисковый. Передача крутящего момента — с помощью карданных шарниров.
Один комплект лопастей вертолета изготавливался по технологии, описанной в журнале «Моделист-конструктор» № 3 за 1970 год, а другой — по нашей собственной, упрощенной, как мы ее называли, «музыкальной».
Был выбран монолитный брус ели с определенной ориентацией слоев и требуемой структурой. Бруски сушились в прессе, фуговались, вымачивались и вновь сушились в прессе, еще раз фуговались и фиксировались лаками, затем профилировались, фиксировались лаками и опять доводились… Затем вклеивались усиливающие накладки на комлевые части лопастей, накладки в районе законцовок (и, собственно, сама законцовка), а также триммерный узел. Далее лопасть оклеивалась стеклотканью с использованием эпоксидной смолы, шпаклевалась, полировалась и окрашивалась. Удалось даже получить отрицательную крутку концевых сечений лопастей.
Балансировка лопастей по профилю выполнялась так, как это рекомендовалось в уже упоминавшемся номере «Моделиста-конструктора». Конечно, такие лопасти получаются достаточно тяжелыми. Однако это все же значительно лучше, чем использовать списанные и обрезанные лопасти от вертолета Ка-26, как это делает большинство знакомых нам «автожирщиков».
Рис. 1. Вертолет-тренажер НГУ-3. Рис. 2. Компоновочная схема главного редуктора вертолета-тренажера: 1 — подшипниковая опора, 2 — опорная труба, 3 — муфты свободного хода, 4 — конические шестерни первой ступени редуктора, 5 — цилиндрические шестерни второй ступени редуктора, 6 — фрикцион, 7 — упругий элемент фрикциона, 8 — карданный шарнир, 9 — рычаг привода фрикциона, 10 — ведомый шкив. Рис. 3. Компоновка силового каркаса и силового агрегата. Рис. 4. Кинематическая схема вертолета-стенда НГУ-3. Рис. 5. Конструкция комлевой части лопасти несущего винта: 1 — накладка (сталь 45), 2 — промежуточная накладка (текстолит), 3 — лопасть. Рис. 6. Втулка несущего винта с механизмом угла установки лопастей: 1 — вал ротора, 2 — ось горизонтального шарнира, 3 — стакан, 4 — шлиц-шарнир, 5 — ступица втулки, 6 — траверса, 7 — тяга управления шагом винта. Рис. 7. Шаровой шарнир вала несущего винта: 1 — вал, 2 — муфта свободного хода, 3 — шаровой наконечник вала, 4 — сухарь, 5 — палец, 6 — разрезная втулка в обойме, 7 — ведомое зубчатое колесо.
Конструкцию редуктора открытого типа мы позаимствовали у радиоуправляемой модели вертолета и, как показала практика, не ошиблись. И вообще наш вертолет представляет собой, по сути, подобие такой модели, а при отсутствии требований к значительному ресурсу много проблем отсеивается из-за простоты конструкции.
Карданная передача выполнена подобно приводу от дифференциала к колесам на автомобиле «Запорожец». Проще не придумаешь, если опять же не принимать во внимание требования ресурса.
Конструкция втулки несущего винта вместе с горизонтальными шарнирами выглядит достаточно неказисто. Но она позволила обеспечить желаемую установку и разнос лопастей, а также избежать сварных соединений, не способных обеспечить стабильную прочность.
Балка хвостового (рулевого) винта, костыли и раскосы выполнены из дюралюминиевых (Д16Т) труб. Кинематика привода рулевого винта может доставить много хлопот: длинные валы — это всегда сложно. Но мы все же не соблазнились на ременную передачу и остались верны карданному валу.
Тележка шасси (без носовой стойки) — от мотодельтаплана. На тележке смонтирована дюралюминиевая рама и силовой агрегат. Последний устанавливается на виброгасящей подушке из древесины.
Кинематическая схема трансмиссии вертолета — это комбинация шкивов и зубчатых колес. Промежуточные подшипниковые опоры вала привода рулевого винта установлены с использованием резиновых подушек. Диаметры шкивов и передаточные отношения зубчатых передач подбирались и варьировались применительно к характеристикам несущего и рулевого винтов, а также параметрам силового агрегата.
Стенд для испытаний вертолета был сварен из стальных труб по чертежам, опубликованным в журнале «Моделист-конструктор» № 5 за 1983 год: в этом номере описывалось устройство для обучения полетам дельтапланеристов. В нашем же случае мы использовали стенд для обеспечения безопасности в процессе испытания и выработки навыков пилотирования вертолета. Установленный на нем вертолет может перемещаться вперед, назад, вверх, а также (в небольших пределах) разворачиваться при работе рулевого винта. Может меняться и угол тангажа за счет гоширования (закручивания) всей фермы стенда, поскольку она плоская и не работает на кручение.
Надо сказать, что использование стенда позволило дать возможность всем строителям нашего вертолета приобрести навыки управления винтокрылой машиной, не рискуя при этом единственным экземпляром летательного аппарата и собственной жизнью.
В последнее, время в авиационном моделизме широкое распространение получили летающие модели, управляемые по радио, в том числе вертолеты. Впервые такую модель продемонстрировал в 1959 году на Всесоюзных соревнованиях С. Воробьев. Для управления полетом он применил принцип изменения центровки аппарата. Спустя год на первенстве страны в Куйбышеве появился вертолет В. Борисова с аэродинамическим приводом ротора. В 1964 году на матчевой встрече спортсменов Москвы и Ленинграда он же представил построенную по схеме Б. Юрьева новую модель с рулевым винтом. Однако машина была «сырой» и, к сожалению, так и осталась незаконченной.
В течение ряда лет и автор статьи В. Слепков работал над созданием радиоуправляемой модели вертолета. В 1977 году она была построена и совершила ряд удачных полетов продолжительностью в несколько минут, несмотря на сравнительно малую мощность двигателя.
Известные зарубежные модели вертолетов, как правило, тяжелы, поскольку имеют сложную систему управления — отсюда потребность в мощном (до 10 см 3 ) двигателе. Преимущество же модели Слепкова в ее простоте. Она может выполнять управляемые развороты, несмотря на ограниченное число команд, и имеет двигатель 2,5 см 3 .
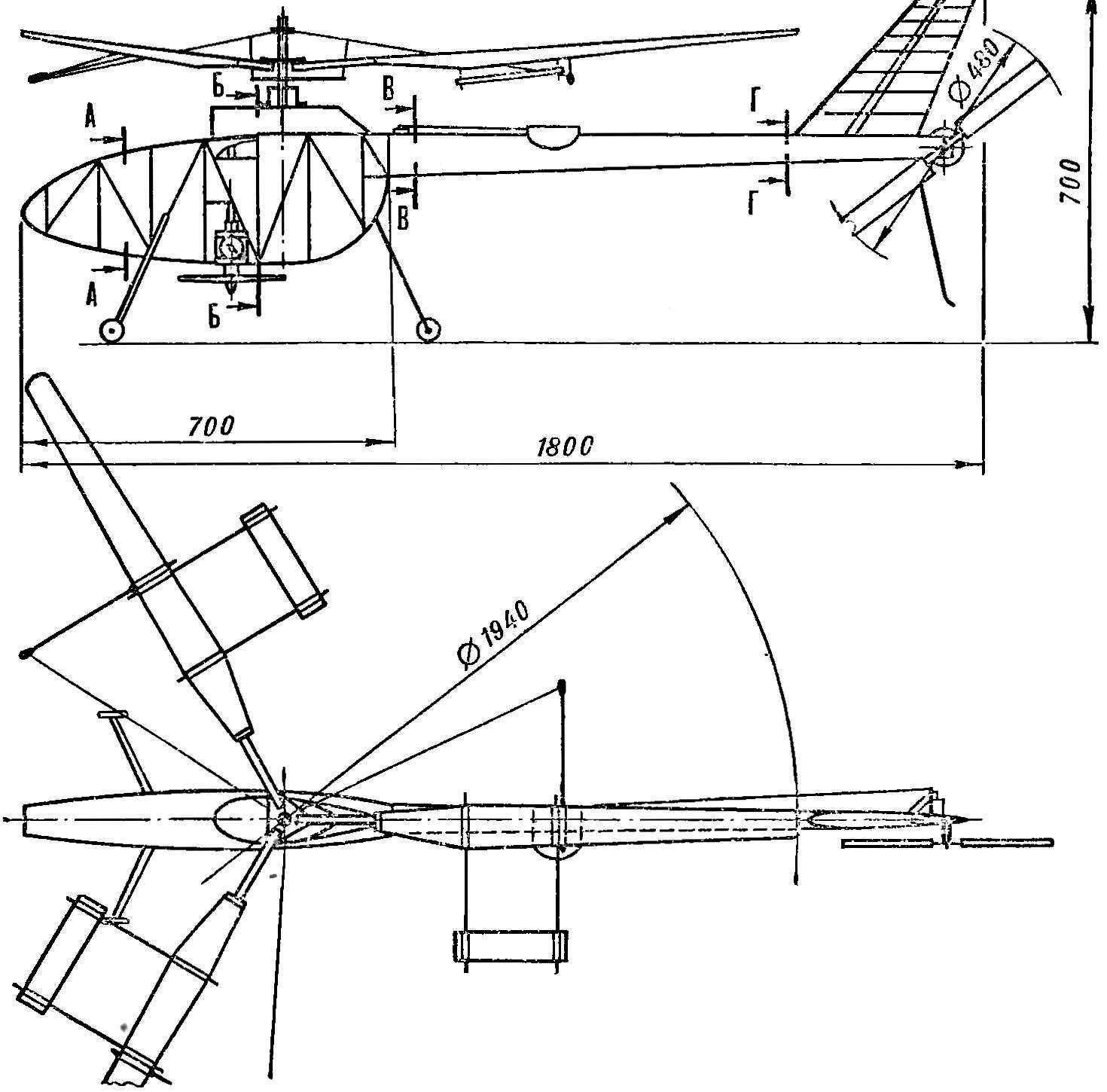
Рис. 1. Схема модели вертолета.
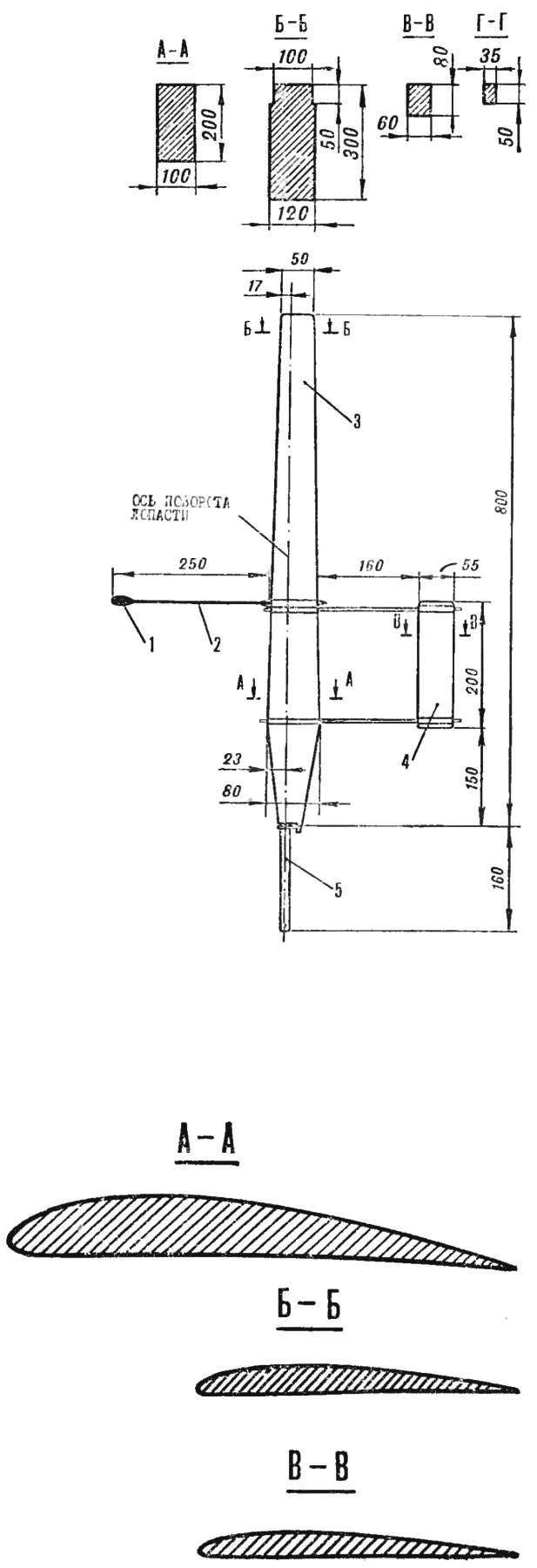
Рис. 2. Лопасть винта:
1 — стабилизирующие грузы, 2 — рычаг, 3 — лопасть, 4 — стабилизаторы, 5 — втулка.
Модель доступна широкому кругу авиамоделистов.
РАСЧЕТ ТЯГИ ВИНТА. Постройку любой модели начинают с выбора основных параметров и определения мощности двигателя. Затем можно перейти к определению тяги винта. По формуле Н. Е. Жуковского для режима висения она вычисляется следующим образом:
Т = (33,25 • N • D • η0)2/3,
где N — мощность двигателя в л. с.;
D — диаметр винта в метрах; η0 — относительный КПД несущего винта.
За вычетом потерь (40%) на вращение рулевого винта, вентилятора и собственно редуктора мощность двигателя для работы несущего винта составляет 0,15 л. с.
Значение относительно КПД последнего может достигать 0,7—0,75, а с учетом ухудшения аэродинамики винта из-за стабилизирующих грузов и стабилизаторов — 0,6.
Подставляя эти параметры в формулу, определяем тягу:
Т = (33,25 • 0,15 • 1,94 • 0,6)2/3 = 3,3 кг.
Однако при горизонтальном полете она может возрасти от снижения индуктивного сопротивления. Это подтверждают летные испытания. При двигателе, отрегулированном на максимальную мощность, скороподъемность модели достигает 1—1,5 м/с. При дросселировании двигателя модель совершает горизонтальный полет.
НЕСУЩИЙ ВИНТ модели состоит из трех лопастей. Каждая из них (рис. 2) может поворачиваться во втулке относительно оси, проходящей через линию фокусов, то есть имеет осевом шарнир. Установка угла ее атаки в полете происходит автоматически с помощью стабилизирующего груза, который тягой (капроновая леска Ø 0,5 мм) связан с валом. При малом вращении ротора стабилизирующий груз опускается и уменьшает тем самым установочный угол лопасти, выравнивая роторную скорость.
При отклонении плоскости ротора они циклически изменяют установочные углы лопастей и возвращают ротор в прежнее положение. Для демпфирования колебаний относительно осевого шарнира на ней установлены стабилизаторы, которые, кроме того, улучшают переход модели на режим авторотации.
Профиль лопасти выпукло-вогнутый, переменный — его толщина и вогнутость уменьшаются к концу. В наиболее широком месте (сечение А — А) относительная толщина составляет 12%, вогнутость — 6%. На конце эти величины соответственно 8% и 4% (сечение Б — Б).
Лопасть изготовлена из бальзы, передняя и задняя кромки — из сосны. Ось стальная Ø 5 мм, вклеена на смоле и зафиксирована стальным штифтом Ø 2 мм. Вращается она во втулке на двух шарикоподшипниках типа 1000065 (наружный Ø 13 мм). Лопасти могут поворачиваться в пределах — 5° — + 40°.
Профиль стабилизатора плоско-выпуклый, с относительной толщиной 8% (сечение В — В), сделан целиком из бальзы удельного веса 0,1 г/см3. Как и лопасть, он оклеен микалентной бумагой, окрашен нитрокраской и покрыт сверху полимеризующимся лаком. Для горизонтального полета на модели установлен автомат перекоса (рис. 3), циклически изменяющий угол установки лопасти по отношению к фюзеляжу.
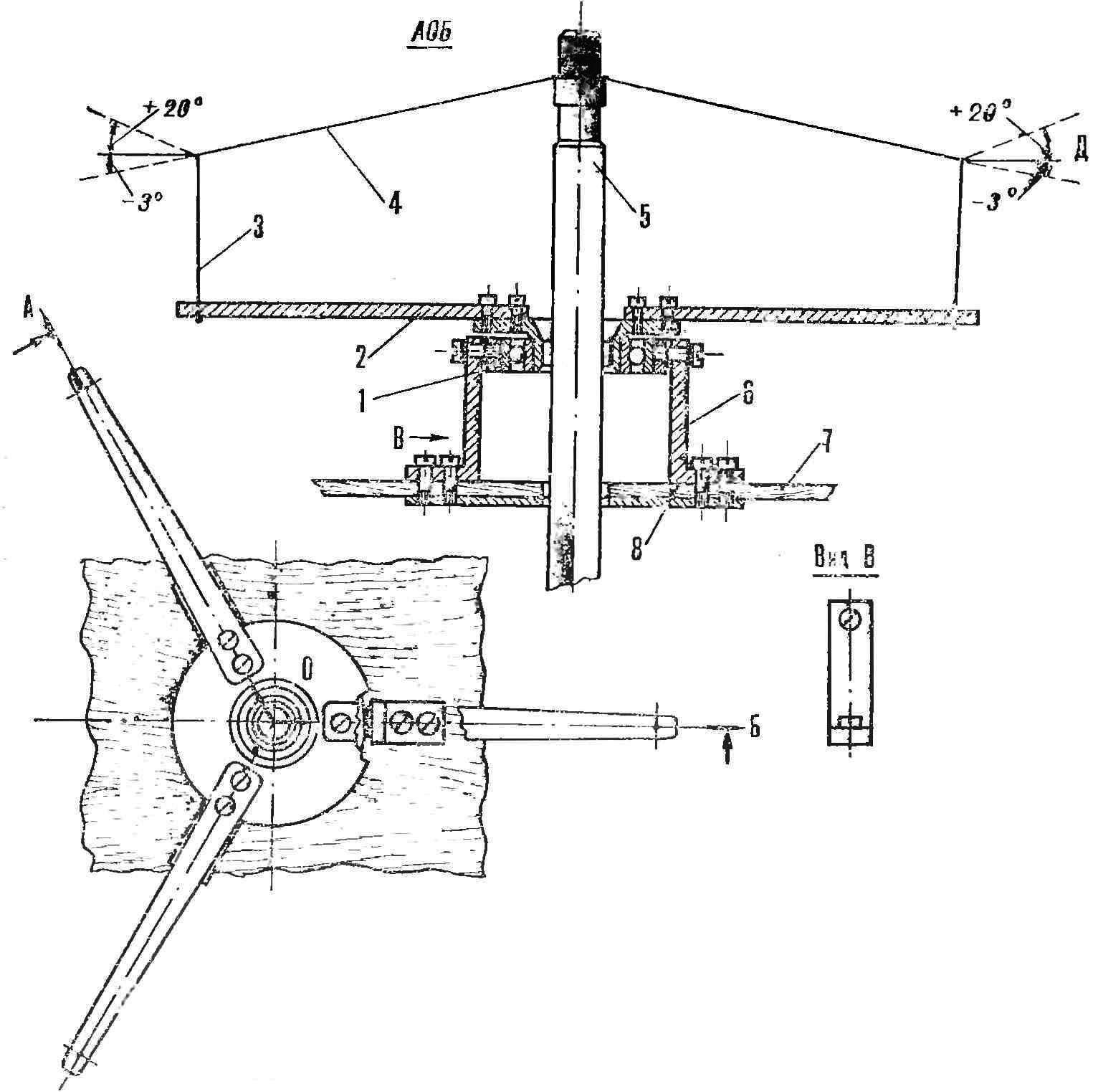
Рис. 3. Автомат перекоса:
1 — шарикоподшипник, 2 — рычаг, 3 — управляющая тяга, 4 — тяга к стабилизирующему грузу, 5 — вал несущего впита, 6 — стойка, 7 — кожух редуктора, 8 — место установки прокладок для регулировки плоскости автомата перекоса (в пределах 0—10°), Д — диапазон изменения углов установки тяг, идущих к стабилизирующим грузикам во время полета.
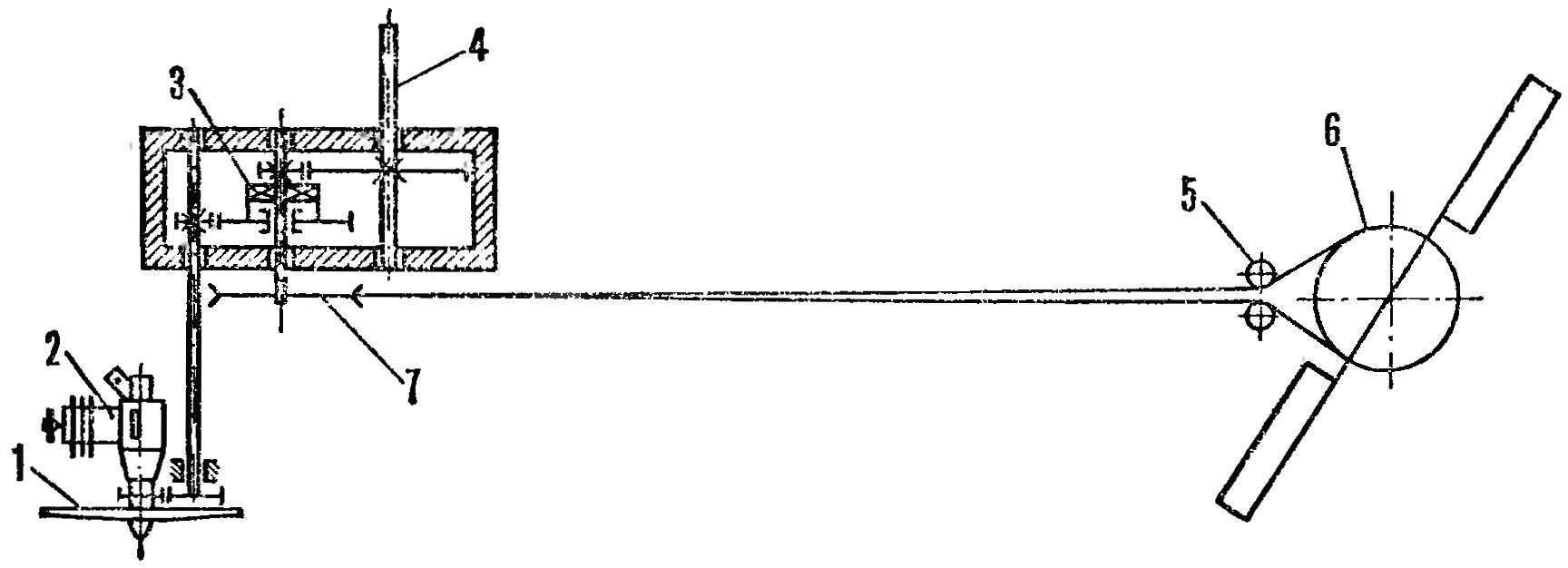
Рис. 4. Кинематическая схема редуктора:
1 — двигатель, 2 — маховик-вентилятор, 3 — муфта свободного хода, 4 — вал несущего винта, 5 — направляющие ролики, 6 — ведомый шкив, 7 — ведущий шкив.
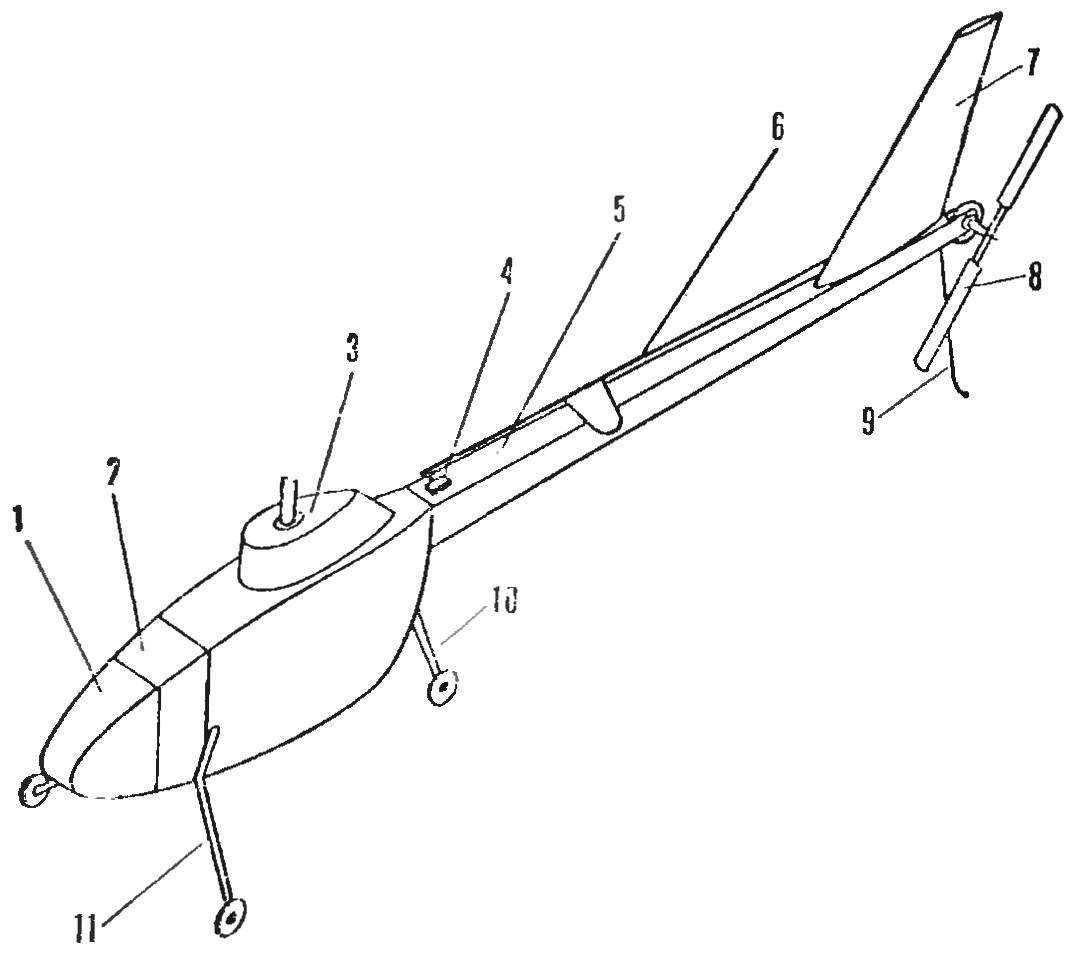
Рис. 5. Компоновочная схема фюзеляжа:
1 — центральная часть, 2 — отсек для радиоаппаратуры, 3 — кожух редуктора, 4 — рулевая машинка, 5 — хвостовая балка, 6 — управляющая тяга, 7 — киль, 8 — рулевой винт, 9 — костыль, 10 — задняя стоика шасси, 11 — передняя стойка шасси.
На рассматриваемой модели этот угол — фиксированный, отрегулированный на постоянную горизонтальную скорость полета V = 5 м/с.
Конструкция автомата перекоса базируется на шарикоподшипнике тина 1000903 с внутренним Ø 17 мм и наружным 30 мм. Внешнее кольцо подшипника прикреплено к фюзеляжу на трех дюралюминиевых стойках, установленных под углом 10° к плоскости вращения ротора по курсу полета. Вместе с ротором вращается и внутреннее кольцо с тремя рычагами, соединенными тягами со стабилизирующими грузами, которые циклически меняют шаг лопастей.
РУЛЕВОЙ ВИНТ имеет две лопасти (рис. 1), прямоугольные в плане, шириной 38 мм. Профиль выпукло-вогнутый, толщина в комлевой части 12%, на конце 8%.
Вертолет управляется по курсу изменением шага винта. Среднее значение угла установки лопастей 15°, диапазон изменения угла их поворота — 2° + 12°.
ДВИГАТЕЛЬ И РЕДУКТОР. Двигатель модели с рубашкой охлаждения Ø 40 мм крепится в нижней части фюзеляжа с помощью детали, выпиленной из дюралюминия. На его валу установлены первая шестерня редуктора (рис. 4) и вентилятор.
Редуктор несущего винта — трехступенчатый. Первая ступень выполнена на шестернях с модулем 0,5 мм шириной 6 мм: ведущая — стальная, с числом зубцов Z1 = 37, ведомая — латунная с числом зубцов Z2 = 48. Вторая ступень имеет шестерни с модулем 0,6 мм: ведущая — стальная, ведомая — дюралюминиевая, с числом зубцов соответственно Z3 = 23 и Z4 = 177. Третья ступень — на шестернях из того же материала, что и вторая. Модуль увеличен до 0,8 мм, число зубцов Z5 = 20, Z6 = 100.
Таким образом, общее передаточное отношение друг к другу валов двигателя и несущего винта составит:
Вращение от основного редуктора к рулевому винту передается через кольцевую капроновую нить и два шкива, выточенных из дюралюминия. Ведущий установлен на второй ступени редуктора, ведомый — на рулевом винте. Их диаметры одинаковы. Поскольку последняя ступень редуктора имеет передаточное отношение 1:5, то без учета проскальзывания рулевой винт вращается в пять раз быстрее несущего.
На второй ступени основного редуктора установлена муфта свободного хода, обеспечивающая спуск вертолета при остановке двигателя. Авторотация не нарушает связи между несущим и рулевым винтами, что позволяет управлять курсом модели при снижении.
За время испытаний как на земле, так и в полете двигатель с редуктором проработал около трех часов. При этом потребовалось заменить поршень и шариковые подшипники вала двигателя. Износ шестерен редуктора не превысил допустимой величины.
ФЮЗЕЛЯЖ состоит из двух разъемных элементов: центральной части и хвостовой балки (рис. 5), которые соединены резиновыми нитями. Такое крепление надежно фиксирует положение хвостовой балки в полете и смягчает нагрузки при ударах на посадке. Конструкция набирается из сосновых стрингеров сечением 3X3 мм 2 в хвостовой балке и 5X5 мм 2 в центральной части, в которой установлены также 7 шпангоутов из фанеры толщиной 1 мм, усиленных сосновыми рейками сечением 3,5 X 3,5 мм 2 . Место крепления двигателя снизу усилено фанерой толщиной 5 мм. Редуктор своей верхней частью винтами М4X10 мм крепится к боковым брускам сечением 10X6 мм. Его кожух склеен из бальзы толщиной 2 мм.
Все узлы фюзеляжа соединены эпоксидной смолой, что обеспечивает достаточную прочность и надежную защиту от воздействия горючего.
Для размещения приемника и дешифратора впереди фюзеляжа сделан специальный отсек. Передние стойки шасси выгнуты из дюралюминиевых пластин толшиной 2,5 мм, задняя — из двух стальных прополочных стержней Ø 2,6 мм. Центральная часть фюзеляжа обтянута капроном, хвостовая балка — микалентной бумагой.
ЗАПУСК. Модель стартует с рук. Двигатель приводится в действие обычным способом, за маховик-вентилятор. Облегчить запуск можно стартером.
Первый полет надо проводить в штилевую погоду при нейтральном положении кольца автомата перекоса. Время работы двигателя желательно ограничить таймером. При правильном старте вертолет набирает высоту по вертикали со скоростью около 1,5 м/с.
После окончания работы двигателя модель переходит на авторотацию. Для предотвращения вращения фюзеляжа рукоятку управления рулевым винтом на пульте управления отклоняют вправо.
Дальнейшие полеты можно выполнять с отклоненным кольцом автомата перекоса, благодаря чему вертолет может совершать взлет с горизонтальной скоростью и управляться по курсу.
ОСНОВНЫЕ ПАРАМЕТРЫ МОДЕЛИ
Диаметр несущего винта, мм — 1940
Ометеемая поверхность, дм 2 — 294
Вес модели, г — 2950
Коэффициент заполнения несущего винта — 0,065
Диаметр рулевого винта, мм — 480
Полетная мощность двигателя, л. с. — 0,25
Скорость вращения вала двигателя в полете, об/мин — 12 000
Передаточное отношение редуктора от двигателя к несущему винту — 1:32
Передаточное отношение от двигателя к рулевому винту — 1:6,4
Скорость вращения несущего винта, об/мин — 375
Скорость вращения рулевого винта, об/мин — 1875
Вес аппаратуры, установленной на модели, г — 515
В. СЛЕПКОВ, кандидат технических наук, мастер спорта СССР
Многократные попытки переделок свободнолетающих моделей вертолетов на радиоуправляемые, как это было с моделями самолетов и планеров, оказались безуспешными. Это объясняется тем, что модели вертолетов свободного полета, построенные по несимметричной или соосной схемам с вращающимися двигателями, не имеют того, что называется корпусом. Попросту говоря, у них нет ни носа, ни хвоста. Поэтому всякое движение для них, кроме «вверх» и «вниз», имеет направление вперед. А управление направлением движения модели вертолета без ориентированного в пространстве корпуса, как и управление скоростью движения, невозможно без автомата перекоса. Его же на свободно-летающих и так называемых таймерных вертолетах и нет.
Уточним, что радиоуправляемой называется такая модель вертолета, которая может совершить посадку на место взлета. Современная модель такого типа имеет почти те же органы управления, что и большой вертолет (хотя на отдельных моделях, как и на описываемой, нет привода на общий шаг). Почти все модели оснащены гироскопическими автоматами стабилизации (непосредственно связанными с несущим ротором), назначение которых — обеспечить постоянное положение плоскости вращения несущего ротора при резких внешних возмущениях.
Приводим краткое описание и чертежи одной из японских моделей ТМ-20. Не все технические задачи решены в ней наилучшим образом. Конструктору, желающему заняться освоением этой неизученной области технического творчества, следует подготовиться к преодолению значительных трудностей.
В отечественной литературе описаний радиоуправляемых моделей вертолетов и рекомендаций по их постройке пока нет. Дело это для наших моделистов новое, а быть пионером в новом направлении модельной техники почетно.
Радиоуправляемые модели вертолетов — новый класс в авиамодельном спорте. В правилах соревнований пока нет даже определения, что такое модель вертолета, не разработаны и четкие технические требования.
Недостаток информации о таких моделях сдерживает развитие этого класса. Как результат, к сожалению, приходится констатировать большое отставание в нем наших спортсменов.
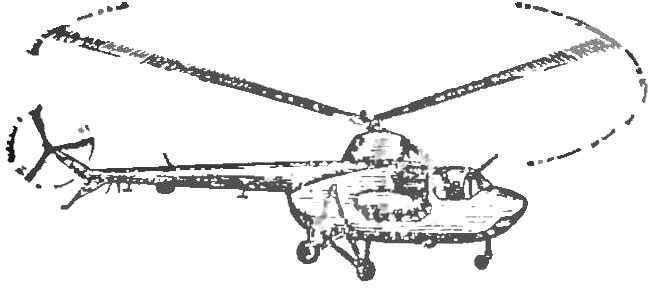
Рис. 1.
Рис. 2.
Рис. 3.
Было немало попыток поднять в воздух радиоуправляемую модель вертолета, но преодолеть психологический барьер — боязнь разбить столь сложную технику — удалось только авиамоделистам Московского авиационного института Виталию Макееву и Игорю Цибизову, которые установили первый Всесоюзный рекорд продолжительности полета с посадкой на место взлета, равный 6 мин 20 с. В другом полете их модель пролетела 2700 м и совершила посадку на заранее намеченную площадку.
Освоение ими пилотирования модели обошлось без серьезных поломок. Поэтому возможность безаварийного освоения новой техники следует считать доказанной. Высказывается даже мнение, что научиться пилотировать модель вертолета сразу проще, чем переучиваться после пилотирования модели самолета. Но прежде чем приступать к постройке модели, необходимо познакомиться с особенностями схемы, конструкции и принципом попета вертолета. Начнем с терминологии, которая в дальнейшем облегчит наше взаимопонимание.
Вертолет — летательный аппарат тяжелее воздуха, способный неподвижно висеть, а также перемещаться в воздухе под любым углом к горизонту. Подъемная сила и тяга у него создаются одним или несколькими роторами, приводимыми во вращение мотором.
Однороторный вертолет (рис. 1) с одним (главным) несущим ротором и хвостовым винтом для компенсации реактивного момента. Хвостовой винт используется также для управления по курсу.
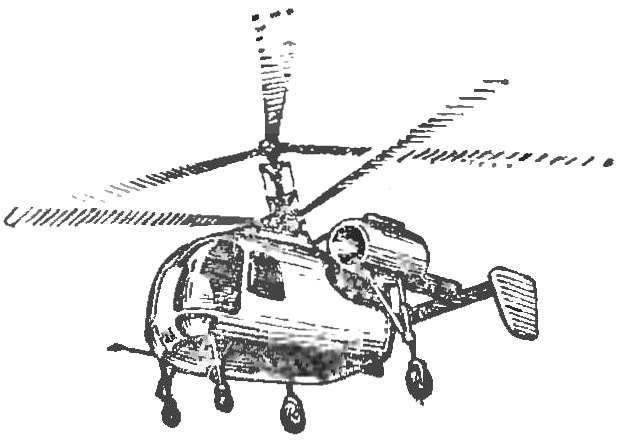
Соосный вертолет (К-26, рис. 2) с двумя роторами, расположенными на одной оси и вращающимися в противоположных направлениях.
Вертолет поперечной схемы (рис. 3) с двумя роторами, расположенными по сторонам фюзеляжа и вращающимися в противоположных направлениях.
Вертолет продольной схемы (рис. 4) с двумя роторами, расположенными по концам фюзеляжа и вращающимися в противоположных направлениях.
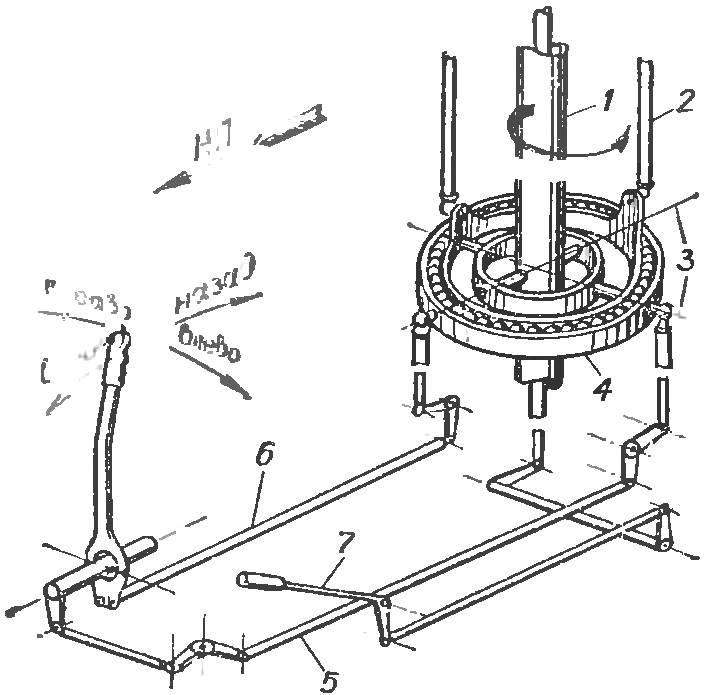
Рис. 5. Автомат-перекос:
1 — вал ротора, 2 — тяга, 3 — оси автомата-перекоса, 4 — автомат-перекос, 5 — тяга поперечного управления, 6 — тяга продольного управления, 7 — рычаг управлення общим шагом.
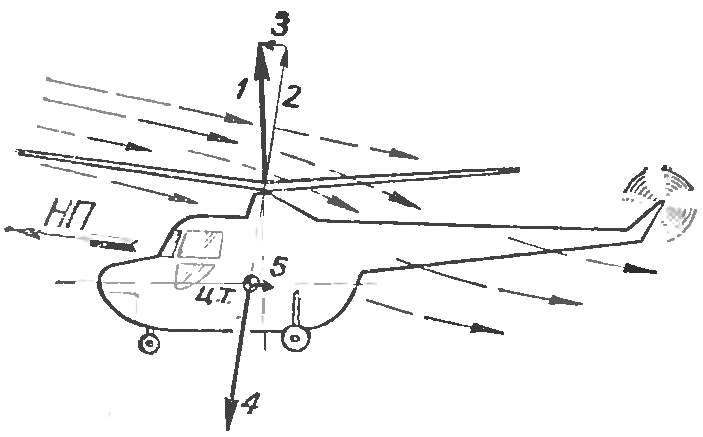
Рис. 6. Схема однороторного вертолета:
1 — тяга, 2 — вертикально поставленные тяги, 3 — горизонтально поставленные тяги, 4 — вес, 5 — лобовое сопротивление.
Ротор (главный) — винт, служащий для создания подъемной силы.
Автомат-перекос (рис. 5) — механизм, служащий для циклического изменения угла установки (шага) лопастей ротора.
Втулка ротора — агрегат, служащий для соединения лопастей с ведущим валом.
Горизонтальный шарнир — часть втулки ротора, обеспечивающая возможность махового движения лопастей.
Осевой шарнир — часть втулки ротора, позволяющая изменять угол установки (шага) лопастей.
Конус ротора — поверхность, описываемая лопастями ротора.
Плоскость вращения ротора — плоскость, проходящая через втулку ротора перпендикулярно ее оси.
Угол взмаха — угол между осью лопастями и плоскостью вращения ротора.
Угол установки — угол между хордой профиля попасти и плоскостью вращения ротора.
Изменение общего шага — одновременное, одинаковое изменение углов установки всех лопастей всех роторов вертолета.
Висение — неподвижное положение вертолета в воздухе, когда его вертикальная и горизонтальная скорости относительно окружающего воздуха равны нулю.
Авторотация — режим работы ротора без подачи мощности от мотора. Ротор на режиме авторотации вращается под действием набегающего (снизу или сбоку) потока воздуха, создавая подъемную силу и тягу. Термин применяется к вертолету в цепом.
В авиамоделизме наибольшее распространение по конструктивным соображениям получили однороторные модели вертолетов.
О работе ротора нужно знать следующее.
Чем меньше число лопастей, тем больше его эффективность.
При висении и при вертикальном подъеме ротор вертолета работает подобно пропеллеру. При поступательном полете его ось вращения наклоняется вперед, и он работает на режиме новой обдувки. Когда лопасти вращаются, подъемная сила заставляет их подниматься, в то время как центробежная сила препятствует их чрезмерному закидыванию вверх, поэтому диск ротора приобретает коническую форму.
От формы лопасти теоретически зависят аэродинамические характеристики вертолета. Однако практика четных испытаний не выявила этого влияния настолько, чтобы можно было сделать какие-либо определенные выводы. Но улучшение поверхности лопасти дает значительное снижение необходимой для попета мощности двигателя. Отрицательная закрутка попасти на 8—10° дает увеличение тяги на 3—4%.
Скорость движения лопасти относительно воздуха неодинакова. Она меньше у оси вращения и больше у конца и, кроме того, меняется в зависимости от положения попасти по отношению к направлению полета.
Так, при вращении винта скорость попасти, движущейся вперед, слагается из скоростей ее вращения и поступательного движения вертолета. Для лопасти же, движущейся назад, скорость будет определяться разностью между скоростью поступательного движения всей машины и собственной скоростью вращения.
Из-за меньшей скорости у попасти, движущейся назад, будет меньше и подъемная сила или, вернее, была бы меньше, если бы в этом случае не увеличивался ее угол атаки для сохранения равновесия. Но слишком увеличивать этот угол тоже нельзя.
Предел максимальной скорости полета определяется величиной истинного угла атаки отстающей попасти. Увеличение числа оборотов ротора при соответственном уменьшении его диаметра приводит к ухудшению характеристики висения. Существенных улучшений можно достигнуть, применив профили с большим значением критических углов атаки, если это не приведет к значительному возрастанию сопротивления.
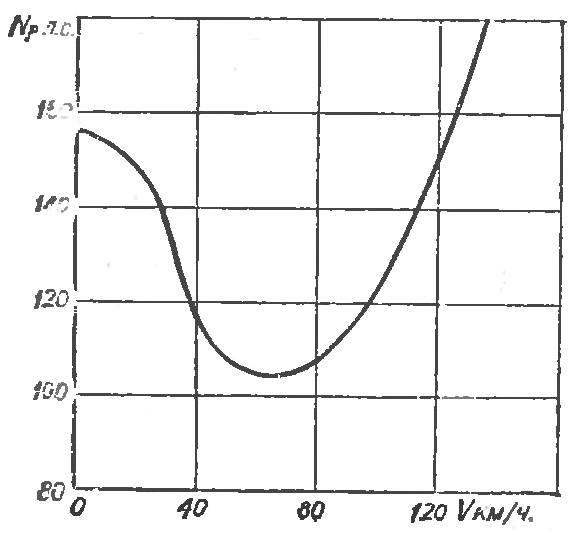
Рис. 7. График необходимой мощности для горизонтального полета.
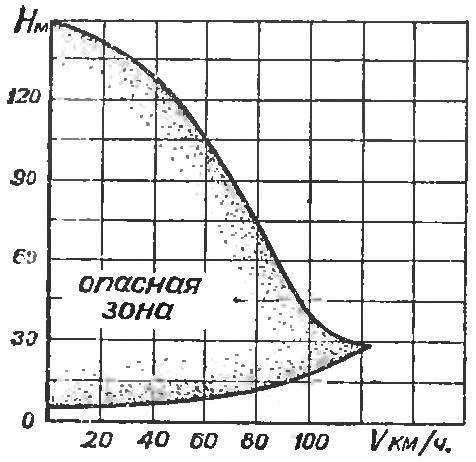
Рис. 8. Диаграмма безопасных высот для случая авторотирующей посадки.
Близость земли и так называемая «земная подушка» значительно влияют на аэродинамические характеристики ротора. Но на расстоянии, равном диаметру ротора, этим влиянием уже можно пренебречь. Для висения вертолета без поступательной скорости необходима мощность на 30% большая, чем при горизонтальном полете на оптимальной скорости.
Такое же явление наблюдается при наборе высоты. Динамический потолок (с поступательной скоростью) всегда больше статического (на режиме висения). При остановке мотора вертолет становится автожиром. В этом случае ротор вращается без подвода мощности в результате действия аэродинамических сил. Последние обеспечивают необходимую тягу ротора и поддерживают его вращение. Но это превращение зависит от многих факторов. Основной из них — направление обдувки ротора воздушным потоком.
При моторном полете воздушный поток набегает на ротор вертолета сверху, на режиме авторотации — снизу. Для обеспечения авторотации необходима определенная скорость потока (прямого или косого), то есть вертолет должен перемещаться относительно него. Так, для безопасной авторотирующей посадки с режима висения аппарат должен иметь запас высоты не менее 150 м или при горизонтальном полете, поступательную скорость не менее 120 км/ч, в противном случае авария неизбежна.
Таковы краткие сведения о вертолете, которые необходимо знать авиамоделисту.
Читайте также: