
Лего робот футболист инструкция
Итак, в нашем распоряжении по-прежнему набор Fischertechnik Robotics 524328 TXT Discovery set (в русской версии названия — Набор первооткрывателя), предоставленный Занимательной робототехнике компанией ПАКПАК для тест-драйва. Этот набор входит в робототехническую серию и имеет новый контроллер Robotics TXT, который мы уже подробно характеризовали ранее, поэтому повторяться не будем. Там же есть подробное описание состава набора.
Данную статью мы снова пишем вдвоем — в прошлый раз моим соавтором был практикующий преподаватель робототехники Денис Кляченко, сегодня со мной в паре — Александр А. Гагарин — практикующий ученик и идейный вдохновитель нашего проекта. Я буду собирать машинку, а Александр — робота-футболиста и робота-разведчика.
Небольшое предисловие и лирическое отступление:
Первый раз я увидела fischertechnik «вживую» и потрогала(!) чуть больше года назад на WRO-2014 в Казани, где у ПАКПАКа был стенд со множеством собранных моделей. До этого я про него читала, смотрела видео и даже записывалась на видео-семинары. Мы обменялись визитками с Григорием Зайцевым и договорились, что когда-нибудь они пришлют нам fischertechnik «поиграть».
Пруфлинк из прошлого (кстати, подписывайтесь на наш твиттер):
В инструкции Fischertechnik Robotics TXT Discovery set — 14 моделей, из которых 7 на колесной базе. Освоив предложенные модели, можно поэкспериментировать. Для всех роботов в Наборе первооткрывателя есть понятные и детализованные инструкции по сборке, схемы подключения и программы.
Одна из самых простых моделей — вентилятор:

Среди не ездящих моделей из деталей набора можно собрать также светофор, шлагбаум, поворотную камеру, сушилку для рук, регулятор температуры, человечка с камерой. Мы далее будем собирать модели на колесной основе.
Робот-автомобиль fischertechnik
Для первой сборки я выбрала робот-автомобиль — базовую конструкцию на колесной основе из этого набора. Для всех прочих моделей будет использоваться этот робот-автомобиль, иногда немного видоизмененный.
Сборку этой модели мы покажем в деталях, чтобы можно было «прочувствовать» механику конструктора.
Итак, поехали. Построение конструкции начинается с моторов:

По сути эти моторы в дальнейшем будут не только выполнять свою базовую функцию, но и станут основой рамы автомобиля:

Не забудьте затянуть ступицы колес, иначе потом они не будут крутиться (я совершила такую ошибку, недостаточно затянув, в уже собранном виде затягивать их было крайне неудобно!):

Далее в конструкции понадобятся провода, напомним, их придется предварительно подготовить — разделить жилы, зачистить контакты и т.п. В наборе присутствуют разные по длине провода, штекеры и отвертка.

Штекеры имеют разный цвет для удобства правильного соединения в электрической схеме:



Пора соединять провода, схема подключения есть в инструкции:

Совершенствуем каркас автомобиля:

Эти завершающие детали скорее для красоты, функциональной нагрузки у них нет:


Конечно, пока это еще не совсем робот. Машинка не оснащена ни датчиками, ни камерой и никаких сигналов из внешней среды не получает. Ей можно задать готовую программу для движения или сделать дистанционное управление. Это базовая модель шасси, на основе которой можно создавать другие.
Программу для движения автомобиля можно написать самим или взять из готовой библиотеки программ.
Робот-футболист fischertechnik
Следующая модель, которую мы выбрали для демонстрации, — робот-футболист.
Вот, сразу фото готового робота:

Он же, до установки камеры — вид сверху, на этом фото видно, как робот ударяет по мячу:

Для удара по мячу используется фототранзистор (он на фото желтого цвета) и серая балка, которая собственно и совершает удар. Важнейший элемент робота — видеокамера, по считыванию изображения с которой ищется мячик.
Программа для работы с видеокамерой достаточно сложная, но она прилагается, поэтому можно начать освоение видеокамеры с готового алгоритма.
Кстати, на прошедшем в июле очередном чемпионате мира по футболу среди роботов RoboCup-2015 роботы одного из победителей были сделаны из конструктора fischertechnik !

Хорватская команда Udruga-Robofreak и их роботы. Фото из фейсбука команды
Робот-разведчик fischertechnik
Еще одна модель, которую можно собрать из набора Fischertechnik Robotics TXT Discovery set 524328, — робот-разведчик (именно эта модель помещена на упаковку). Это достаточно интересная модель, робот сможет двигаться по линии, причем используя не типичный для такой задачи датчик освещенности, а видеокамеру. Можно реализовать сложные и разнообразные алгоритмы с определением цвета и управлением движением в соответствие с цветом.
Кроме того, визуально робот тоже очень симпатичный, благодаря чему видимо и был выбран как «лицо» набора первооткрывателя.
Несколько промежуточных шагов. На этом фото виден датчик температуры на заднем плане: робот при движении может выдать температуру воздуха!

Почти готово, осталось все подключить:


Теперь оживляем робота. Задача — двигаться по линии, выбирая ее цвет в соответствие с цветом показанной роботу карточки. Алгоритм достаточно сложный (программа на диске в наборе). В комплекте есть поле с трехцветной траекторией для тестирования робота-разведчика.

Фрагмент программы робота-разведчика в Robo Pro
Теперь точно готово:

Впечатления и итоги
Ну что, время подводить итоги тест-драйва Набора первооткрывателя и фишертехника вообще.
Механика. Необычная (если вы привыкли к другим платформам), но удобная система креплений «Ласточкин хвост». Основные детали можно крепить со всех шести граней. Конструкции жесткие и прочные (внутри базовых строительных блоков армирующие стальные элементы). Робот fischertechnik получается достаточно тяжелый и устойчивый.
Нестандартная форма моторов — они являются прямоугольными параллелепипедами — позволяет удачно вписывать их в конструкцию (в рассмотренных моделях они стали основанием колесной базы).
Сложность моделей. Набор Discovery set позволяет собрать очень разные по сложности модели и подойдет как для начинающих, так и для продвинутого уровня.
Контроллер. Высокая производительность (главный процессор ARM Cortex A8: два ядра, 32 бит, 600 МГц; периферийный процессор: Cortex M3; память: 128 МБ DDR3 RAM, 64 МБ FLASH). Возможность расширения памяти. Большое количество портов (восемь — для подключения исполнительных устройств и восемь — для подключения датчиков), цветной сенсорный дисплей.
Комплектация набора. Учитывая большое количество портов контроллера, хочется больше различных датчиков. Иными словами комплектация конструктора не раскрывает весь потенциал контроллера. Но набор совместим с другими конструкторами fischertechnik и может быть дополнен как всевозможными датчиками, так и механическими блоками.
Наличие видеокамеры позволяет реализовать элементы машинного зрения. Очень потенциально емкий элемент набора как с точки зрения разнообразия решаемых роботом задач, так и для освоения соответствующих алгоритмов.
Где купить конструкторы fischertechnik
Купить конструктор Fischertechnik Robotics TXT Discovery set, а также другие наборы этой марки можно у официального дилера fischertechnik в России — компании ПАКПАК. Магазин осуществляет доставку в регионы России, а также по странам СНГ и бывшего СССР.
Стартовый робототехнический набор Fischertechnik Robotics LT Beginner Set стоит 11130 рублей. Стартовый набор включает 200 деталей, контроллер более простой версии ROBO LT, ПО, маленький мотор, лампы, фотодатчик, переключатели. Fischertechnik Robotics TXT Discovery set (524328), с которым работали мы, стоит 28500 рублей. Важно, что указанные цены наборов уже включают стоимость программного обеспечения.
Контроллер ROBOTICS TXT, если приобретать отдельно, стоит 20250 рублей. Цена аккумуляторного набора — 4560 рублей.
Любые дополнительные элементы, в т.ч. датчики, блоки, колеса, шестеренки и моторы можно также купить на сайте ПАКПАК в соответствующем разделе. Цены на механику очень низкие — от 1,5 рублей за деталь.
В следующей статье будем тестировать набор Fischertechnik ROBO TX ЭлектроПневматика.

Представляем вашему вниманию пошаговую инструкцию по сборке из набора LEGO Education WeDo 2.0 модель «Пинающий футболист«. Сборка состоит из 42 деталей и 25 пошаговых слайдов. В конце презентации детей ждут задания по собранной модели. В презентации представлена примерная управляющая программа.
Рады вам предложить новую схему сборки из лего виду 2 «Пинающий футболист». Сами не ожидали, что получится такая простая и интересная модель. Если каждый ученик соберет такого футболиста, то можно уже будет поиграть в импровизированный футбол. Чей робот забьет в ворота больше мячей, тот и выиграл. Наши подопечные уже сыграли в такую игру и остались довольны.
Пошаговая инструкция виду настолько проста, что мы даже сами удивились. Дети собрали данную модель за 10 минут, еще 15 минут потратили на задания. Все оставшееся время мы потратили на игру. Кстати, на нашем Youtube канале RobboBank , вы можете увидеть как мы собирали данную модель.
Что должно получиться в итоге:
Какие программные блоки WeDo 2.0 мы использовали в программе:
- блок запуска (Play)
- блок мотора с выставлением мощности
- блок направления движения мотора
- блок задания времени движению мотора
Для сборки модели «Пинающий футболист» по инструкции нам понадобится всего один набор LEGO Education WeDo 2.0. Также, после сборки моделей учеников ждут практические задания по программированию.
Задания виду 2.0:
1) Детям нужно будет ответить на вопрос и после которого последует задание: Чего не хватает нашему футболисту? Правильно, ворот. Постройте ворота, поставьте футболиста напротив ворот, и настройте управляющую программу так, чтобы наш футболист как можно чаще попадал в ворота мячом. Задание простое. Подгоните значения в программе с расчетом расстояния от робота до ворот.
2) Школьникам нужно будет также ответить на вопрос и выполнить задание: А чего еще не хватает для полной картины действий? Точно, комментатора. Добавьте в управляющую программу блок звука и запишите свой голос, как призыв к действию. Например: «Внимание, удар по воротам!». Мы это с вами проделывали уже не один раз.
Все детали входят в конструктор WeDo 2.0. Схема создана в программе Studio 2.0 , но представлена в презентации. Это сделано для большего удобства учителя. Презентацию можно показать в любом классе, в отличие от программы.
Совершенно готовая схема сборки Wedo 2.0 для показа на уроке детям по дополнительному образованию.
Все материалы проверены. Ошибок и вирусов нет.
Напоминаем, что скачать готовую пошаговую инструкцию по сборке для набора LEGO® Education WeDo 2.0 «Пинающий футболист» вы сможете после нажатия на кнопку скачать и просмотра рекламы. За счет рекламы живет наш сайт. Спасибо за понимание!
В прошлом сезоне наша команда открыла для себя такие замечательные соревнования, как футбол роботов WRO.

Мы с нуля изучали новое для нас направление, зачастую "изобретая велосипед", так как материалов в открытом доступе по данному виду соревнований очень мало. Очень помогли нам пара видео от команды "Омега", в которых ребята рассказывают об особенностях своих роботов. Надеемся, что наши публикации тоже подтолкнут вас поделиться своими наработками, идеями и даже немного с нами поспорить.
Первого нападающего в сезоне 2015 мы строили по старым регламентам 2014г, тогда еще был разрешен дриблинг и поэтому нам удалось хотя бы на домашнем поле посмотреть на игру с применением этого способа удерживания и ведения мяча.
Позднее, в сезоне 2015 в правила были внесены изменения и дриблинг запретили, поэтому следующий нападающий (мы назвали его Нападающий 2.0) пытался забить мяч используя другие приемы, о которых вы можете узнать посмотрев соответствующее видео по ссылке выше.
Сезон 2016
WRO сезона 2016 привнесло в регламент футбола новые изменения и теперь он называется "третьим поколением футбола WRO" (WRO Football gen.III). Кардинально изменилось поле, теперь игра идет на ковре, на поле нет цветовой зональной разметки. Появились высокие борта для ориентации роботов на поле с применением дальномеров. Конструктивно изменились ворота - за счет изменения их глубины поле кажется огромным и появился больший простор для маневров. Выглядит поле теперь так:

Роботам разрешили использовать датчик цвета Hitechnic, а для ориентации на поле установить дальномер - причем он должен быть ориентирован строго вправо. Правила регламентируют использование дальномера нападающим только когда робот ориентирован в направлении ворот соперников (датчик смотрит вправо):

Вратарю - когда его датчик ориентирован в направлении ворот, которые он защищает

Либо когда вратарь направлен на ворота соперников (датчик смотрит вправо) с оговоркой, что находясь вне штрафной площадки он не должен создавать УЗ-помех другим роботам:

Давайте немного поговорим о том, какие приемы могут быть использованы для игры в текущем сезоне. Начнем, пожалуй, с нападающего.
Нападающий
Задача нападающего - забить мяч в ворота соперников. Казалось бы, вон он - мяч, а вот - ворота, езжай да забивай! Но не все так просто. Если раньше достаточно было доехать до мяча, ориентируясь на его излучение и "схватив" его вести к воротам или развернув его ударить по ним, то начиная с прошлого сезона "хватать" мяч нельзя.
Давайте подумаем, как бы человек действовал на месте робота? Наверное оглянулся бы в поисках мяча и, заметив его, развернулся к нему лицом, затем побежал бы в его сторону. Может ли робот сделать тоже самое? Может! Правда у него нет головы и шеи, поэтому ему придется развернуться всем корпусом, пока излучение от ИК-мяча не будет строго одинаково с его левой и правой стороны (шаг 1)

В какую сторону выгоднее разворачиваться? В отличии от человека, который развернет голову в поисках мяча наугад, робот чувствует мяч буквально затылком и может начать разворот выбрав сторону, с которой сила излучения мяча интенсивнее
Разворот на месте можно заменить разворотом в движении, тогда робот начав двигаться по луге, ляжет на курс, ведущий к мячу (вариант 1а):

Далее начинается долгий извиистый путь к мячу. Это действительно так, потому как на поле наш робот не единственный кому нужен мяч и пока он едет в его направлении, мяч может быть сдвинут другим роботом. В этом случае движение должно быть скорректировано с учетом нового направления на мяч путем разворота на месте или в движении:

Мы "бежим" на мяч, судорожно соображая, что делать дальше. Очеидно, что если робот продолжит прямолинейное движение он ударит меч и тот покатится в направлении движения робота, но ведь нам нужно подтолкнуть его к воротам, как же быть?
При прохождении некоей точки, лежащей на пути следования на мяч (назовем ее точкой невозврата, см. шаг 3) робот должен принять решение, с какой стороны ему нужно обойти мяч, чтобы оказаться на линии, соединяющей вражеские ворота и мяч так, чтобы мяч оказался между ним и воротами:

Сделать это он может двумя способами - объехав мяч слева или справа. Принять решение об оптимальном пути объезда можно на основе показаний датчика компаса. Если отклонение от направления на ворота соперников положительное (как на рисунке выше), объезжать следует справа, иначе - слева.
Кратчайшая траектория объезда мяча, при которой отсутствует риск случайно задеть его корпусом - окружность с радиусом, равным расстоянию от точки невозврата до центра мяча.
Приняв решение, с какой стороны объезжать мяч, робот должен начать движение по окружности, которую мы назвали "орбитой", до точки схода с нее (см. шаг 4 на рисунке выше). Двигаться вокруг мяча по окружности можно опираясь на показания датчика-поисковика мяча, Такой круг можно описать, если удерживать его показания в одной из боковых зон (в зависимости от нужного направления движения - по часовой стрелке или против).

Далее начинается самое интересное - в какой точке мы должны сойти с орбиты? Очевидно, что это будет точка ее пересечения с прямой, проложенной через мяч и центр вражеских ворот. Для схода с орбиты мы должны опираться на показания датчика компаса и знание о том, по часовой стрелке мы описываем орбиту или против, но об этом - в следующей части статьи
Эти роботы дадут тебе возможность в полной мере познакомиться с серией EV3. В комплекте идут инструкция по сборке, задания для программирования и инструмент программирования, собранные в новом приложении для программирования EV3. Новичкам в создании роботов рекомендуется начинать с этой модели.
Если ты еще никогда не собирал роботов LEGO MINDSTORMS, мы рекомендуем начать с этого! TRACK3R представляет собой робота высокой проходимости на гусеничном ходу с четырьмя взаимозаменяемыми инструментами. Начни с создания корпуса робота, а затем познакомься с возможностями, которые дают 4 разных инструмента TRACK3R: измельчитель с двойным лезвием, разрушительная базука, захватная клешня и молот.
Управляй роботом TRACK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Это шестилапое создание не только выглядит как скорпион, но и ведет себя соответственно. Он может резко развернуться, схватить предмет своей клешней-дробилкой, а хвост-молния готов дать отпор всему, что окажется на его пути.
Управляй роботом SPIK3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Один из самых популярных роботов R3PTAR (высота — 35 см) может скользить по полу как настоящая кобра и с нереальной скоростью атаковать предметы своими красными клыками.
Управляй роботом R3PTAR с планшета или смартфона при помощи бесплатного приложения Robot Commander.

Робот GRIPP3R создан для поднятия тяжестей У него достаточно сил, чтобы своими мощными захватами поднять и кинуть жестяную банку.
Управляй роботом GRIPP3R с планшета или смартфона при помощи бесплатного приложения Robot Commander.

EV3RSTORM — самый усовершенствованный робот LEGO® MINDSTORMS®. Высокий уровень интеллекта и боевая мощь в сочетании с разрушительной базукой и вращающимся тройным лезвием делают робота EV3RSTORM непобедимым.
Загрузи бесплатное приложение Robot commander LEGO® MINDSTORMS® и управляй роботом EV3RSTORM с планшета или смартфона.

Роботы, созданные фанатами
Эти роботы были созданы самыми преданными поклонниками; они могут стать источником нового необыкновенного опыта в сборке и программировании. Мы рекомендуем приступать к сборке этих моделей после того, как тебе удалось собрать 2–3 робота из основной серии.
Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
Роботом-погрузчиком Bobcat® с дистанционным управлением можно управлять при помощи кнопок ИК-маяка, заставляя его двигаться или поднимать предметы.
Разработчик Ральф Хемпел (Ralph Hempel)
Это робот, который умеет рисовать? Точно! Используя обычный маркер, этот принтер рисует линии на бумаге для кассовых аппаратов. Воспользуйся существующей программой,чтобы написать LEGO EV3, или создай свою собственную, чтобы нарисовать всё, что захочется!

Разработчик Лоренс Валк (Laurens Valk).
Хочешь грузовик с дистанционным управлением? Понятно! Крутой автомобиль для увлекательной игры. RAC3 легко модифицируется для движения с большей скоростью за счет дополнительных приводов; кроме того, к нему можно добавить специально собранный прицеп и использовать грузовик как средство для транспортировки.

Разработчик Лассе Стенбэк Лауесен (Lasse Stenbæk Lauesen).
Очаровательный робот-трицератопс может передвигаться и поворачиваться на четырёх ногах.

Разработчик Марк-Андре Базергуи (Marc-Andre Bazergui)
Этот робот — забавный сумасбродный компаньон, реагирующий на ИК-маяк своего друга-жучка. Вы можете управлять роботом KRAZ3 с помощью настраиваемой программы, ИК-маяка или запрограммировать его так, чтобы он двигался по комнате за своим другом-жучком. Разработчик Марк-Андре Базерги (Marc-Andre Bazergui)

Разработчик Вассилис Чриссантакопулос (Vassilis Chryssanthakopoulos)
Робот, созданный по мотивам R2D2 из «Звездных войн», может общаться, следовать за владельцем или перемещаться по комнате туда, куда ему укажут, — через ИК-маяк. Он поддерживает большой набор сценариев, которые легко запрограммировать или расширить, используя новое программное обеспечение EV3.

Разработчик Даниэле Бенедеттелли (Daniele Benedettelli)
Готов сыграть рок-н-ролл? На гитаре LEGO можно играть почти как на настоящем инструменте. Ударяй по одной струне, перебирай пальцами по безладовому грифу и создавай звуки, используя тремоло-систему, чтобы сыграть самые невероятные гитарные соло!

Разработчик Мартин Боогаартс (Martyn Boogaarts)
Дружелюбный робот-помощник, у которого лучше всего получается перемещаться по линиям разного цвета при помощи датчика освещенности, который позволяет ему обнаруживать препятствия на своем пути и реагировать на них. Робот может перемещаться самостоятельно или управляться с помощью ИК-маяка.

Разработчик Рикардо Оливейра (Ricardo Oliveira)
Этот робот хочет поиграть с тобой. Положи красный мяч под стаканчик, используй ИК-маяк, чтобы задать свой уровень, и посмотри, как робот меняет стаканчики. Теперь тебе нужно угадать, где же спрятан мяч? Предложи друзьям посоревноваться, кто быстрее всех найдет красный мяч!

Разработчик: Кеннет Равнхой Мадсен (Kenneth Ravnshøj Madsen)
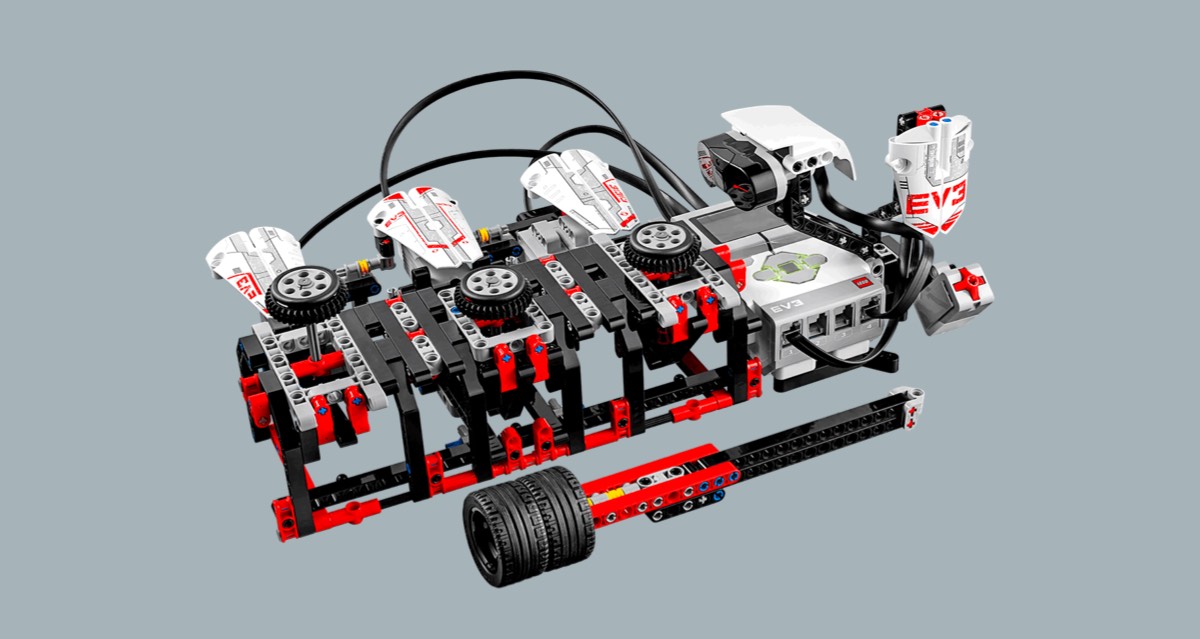
Этот робот поможет рассортировать все имеющиеся у тебя балки LEGO®Technic. Просто вставь балку в механизм, а MR-B3AM определит её цвет и размер.

Разработчик Марк Кросби (Mark Crosbie)
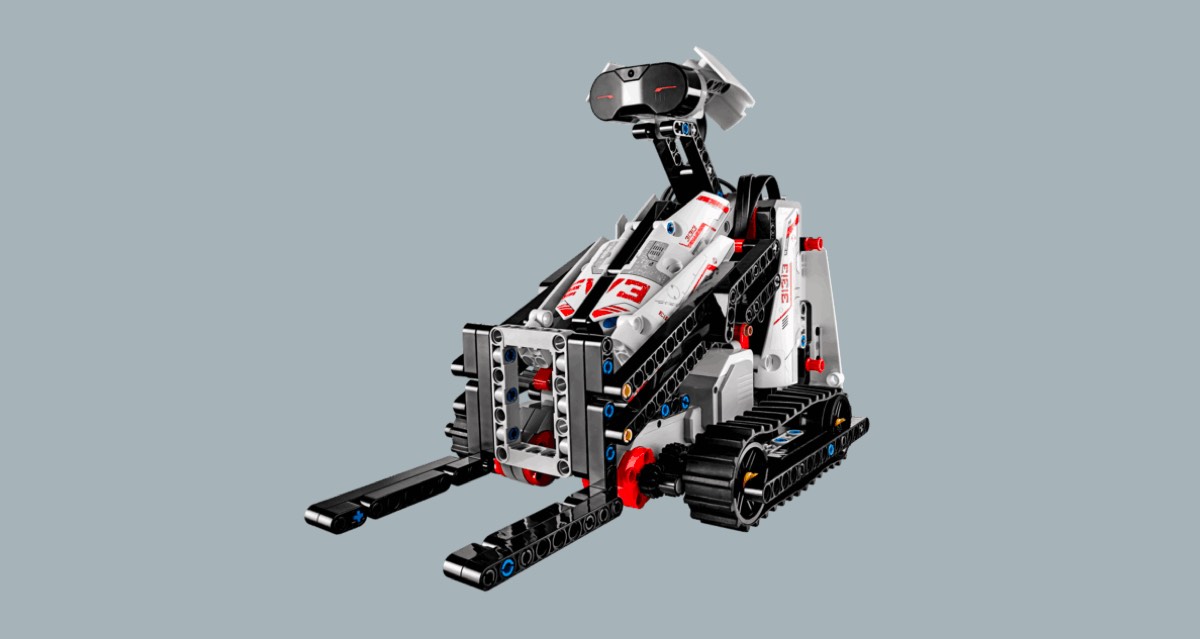
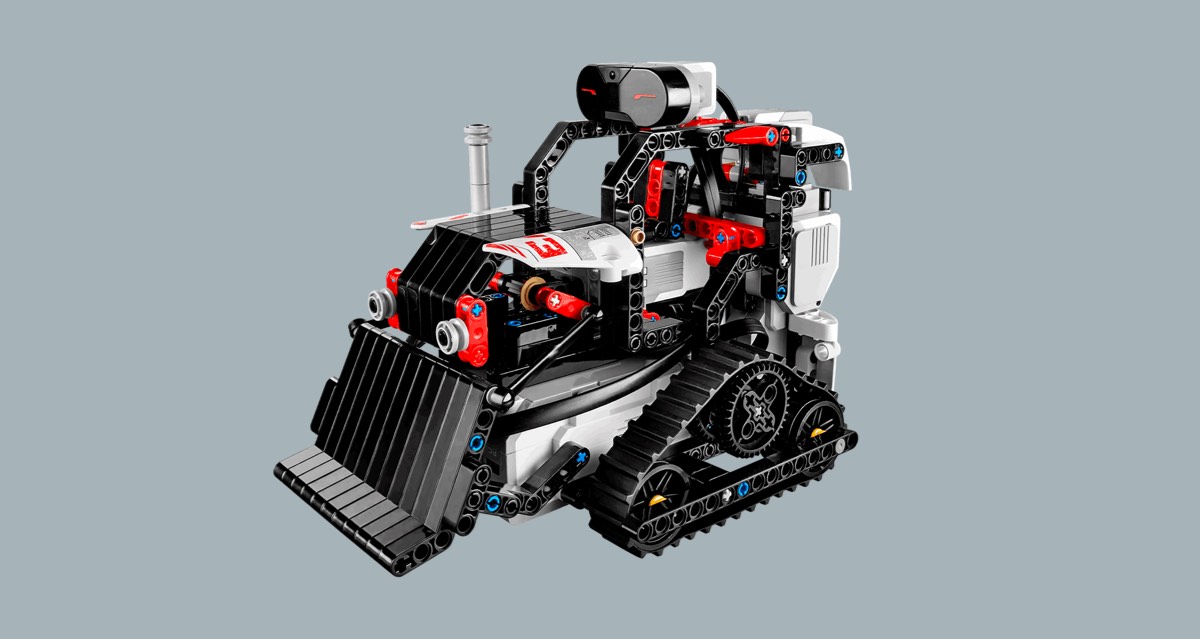
Этот робот-бульдозер управляется с помощью ИК-маяка, но может двигаться и самостоятельно, объезжая препятствия, пока расчищает дорогу и передвигает предметы своим бульдозерным ковшом.
Разработчик Мартин Боогаартс (Martyn Boogaarts)
Эта игра в стиле традиционных игровых автоматов проверяет скорость реакции. Робот поднимет диски, а ты должен как можно быстрее ударить по ним молотком. Предложи друзьям устроить соревнование, чтобы выяснить, кто из вас быстрее всех!
Конкурс по сборке Remix Challenge
Собирай крутых новых роботов, смешивая детали LEGO® MINDSTORMS® с деталями своего любимого набора из серии LEGO Technic. LEGO MINDSTORMS и LEGO Technic — идеальное сочетание для создания совершенно нового семейства роботов LEGO с классным дизайном и интересными возможностями. Нажми на изображения ниже, чтобы изучить и построить модели-победители ежегодного конкурса LEGO Remix Challenge: «Часы с кукушкой», собранные из деталей наборов EV3 (31313) и «Грузовой вертолёт» LEGO Technic (42052), и DOODLEBOT, собранный из деталей наборов EV3 и «Экстремальные приключения» LEGO Technic (42069).
Создавай собственные рисунки с помощью модели DOODLEBOT от LEGO® MINDSTORMS® или же переключи её в режим автопортрета, чтобы она нарисовала саму себя. Положи под руку робота чистый лист бумаги, дай ему карандаш и создавай свои шедевры, управляя им с помощью пульта ДУ EV3. Робот уже запрограммирован на три различных режима рисования.
DOODLEBOT — победитель конкурса сборки моделей LEGO MINDSTORMS Remix Challenge 2017 года. Его построили из деталей двух популярных наборов: LEGO MINDSTORMS EV3 (31313) и «Экстремальные приключения» LEGO Technic (42069).


Этот робот с клешнёй умеет не только хватать, но и приподнимать предметы. И оба эти действия он делает с помощью всего одного мотора. А за счёт резиновых кончиков клешни, робот может приподнимать даже скользкие предметы. Ну и конечно, то, что робот схватил, он может перевезти на другое место.

Для сборки робота c клешнёй я предлагаю инструкцию, а для быстрого старта – демонстрационную программу:
- После старта робот «делает зарядку» - разминает клешню. А как же иначе? Зарядку нужно делать всем!
- После зарядки робот сканирует пространство перед собой на расстоянии до 30 см., поворачиваясь на угол от -90 до +90 градусов (0 градусов – это стартовое положение).
- Если предмет обнаружен, робот подъезжает к нему хватает, едет обратно, разворачивается назад на угол -180 или 180 (смотря, что ближе), проезжает на 10 – 30 см. (первый раз на 30 см., второй - на 20 и третий - на 10) и бросает его. Затем возвращается назад.
- Когда собрано 3 предмета, робот засыпает: программа останавливается.
Вот схема движения робота:

Работу программы в действии можно посмотреть на видео:
Также роботом с клешнёй можно управлять с помощью мобильного приложения RoboLiterate:
Вот видео (обратите внимание, что ползунок справа нужно чуть приподнять наверх, чтобы клешня хорошо хватала предметы):
Инструкция для сборки робота с клешнёй и демонстрационная программа ниже:
Инструкция для сборки робота с клешнёй из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
В версии 2 (от 14.10.2016): датчик расстояния отодвинут чуть вперёд, за счёт чего кнопка за ним (порт 1) нажимается правильно, также под модулем EV3 выделено больше места, чтобы вилки проводов ни во что не упирались.
Демонстрационная программа для робота с клешнёй, собранного из базового набора конструктора LEGO Mindstorms Education EV3 (45544).
Для запуска программы требуется ПО LEGO Mindstorms Education EV3 версии 1.1.1 или выше.
Ещё один способ управления роботом с клешней показан на этом видео:
Читайте также: