
Базовый конструктор для создания манипуляционных устройств
Учебный комплект для создания манипуляционных устройств предназначен для изучения робототехнических технологий, промышленной автоматизации, и общего устройства манипуляционных систем. Применения данного конструктора в образовательном процессе позволяет учащимся на примере собираемых из набора манипуляционных роботов в различных конфигурациях (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA или рычажная кинематика, платформа Стюарта и т.п.) Учащиеся могут разрабатывать модели роботов и программировать их с использованием среды программирования Arduino IDE. Конструкторы данной серии позволяют учащимся расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux реального времени, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.
Комплектация и технические характеристики:
Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, шт
Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, шт
Конструктивные элементы из металла для сборки модели мобильного робота, шт
Крепежные элементы (винты различного номинала и длины), шт
Крепежные элементы (гайки различного номинала), шт
Элементы для создания подвижных и фиксируемых шарнирных соединений, шт
Соединительные кабели различной длины, шт
Комплект конструктивных элементов из металла для сборки модели манипуляторов с плоско-параллельной, угловой кинематикой, рычажной или DELTA-кинематикой, шт
Комплект конструктивных элементов из металла для сборки модели шасси колесного мобильного робота, шт
Датчик нажатия или концевой выключатель, шт
Ультразвуковой датчик расстояния, шт
Инфракрасный датчик, шт
Привод ведущих колес, шт
Образовательный робототехнический комплект должен содержать набор библиотек трехмерных моделей для прототипирования моделей мобильных и манипуляционных роботов различного типа. В состав комплекта должны входить инструкции и методические указания по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA или рычажная кинем., платформа Стюарта и т.п.)
SCARA или рычажная кинематика
Приводной модуль, шт
Робототехнический контроллер, представляющий собой модульное устройство на основе программируемого контроллера и материнской платы с опциональной возможностью встраивания внешнего вычислительного модуля, шт
Встроенный стабилизатор питания
Встроенный опциональный микрокомпьютер
Встроенный микрофон, шт
Комплект для сборки пневмосистемы
Коммутационная плата пневмосистемы, шт
Комплект пневматического захвата
Кнопочный выключатель с фиксацией, шт
Преобразователь интерфейсов USB, шт
Универсальный вычислительный модуль , шт
Интерфейс подключения карты microSD
Модуль технического зрения, представляющий собой вычислительное устройство со встроенным микропроцессором, интегрированной телекамерой и оптической системой, шт
Аккумуляторная батарея, шт
Адаптер питания от сети 220В, шт
USB интерфейсный кабель для программирования программируемого контроллера, шт
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" предназначен для изучения робототехнических технологий, основ информационных технологий и технологий промышленной автоматизации, а также технологий прототипирования и аддитивного производства.
Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.

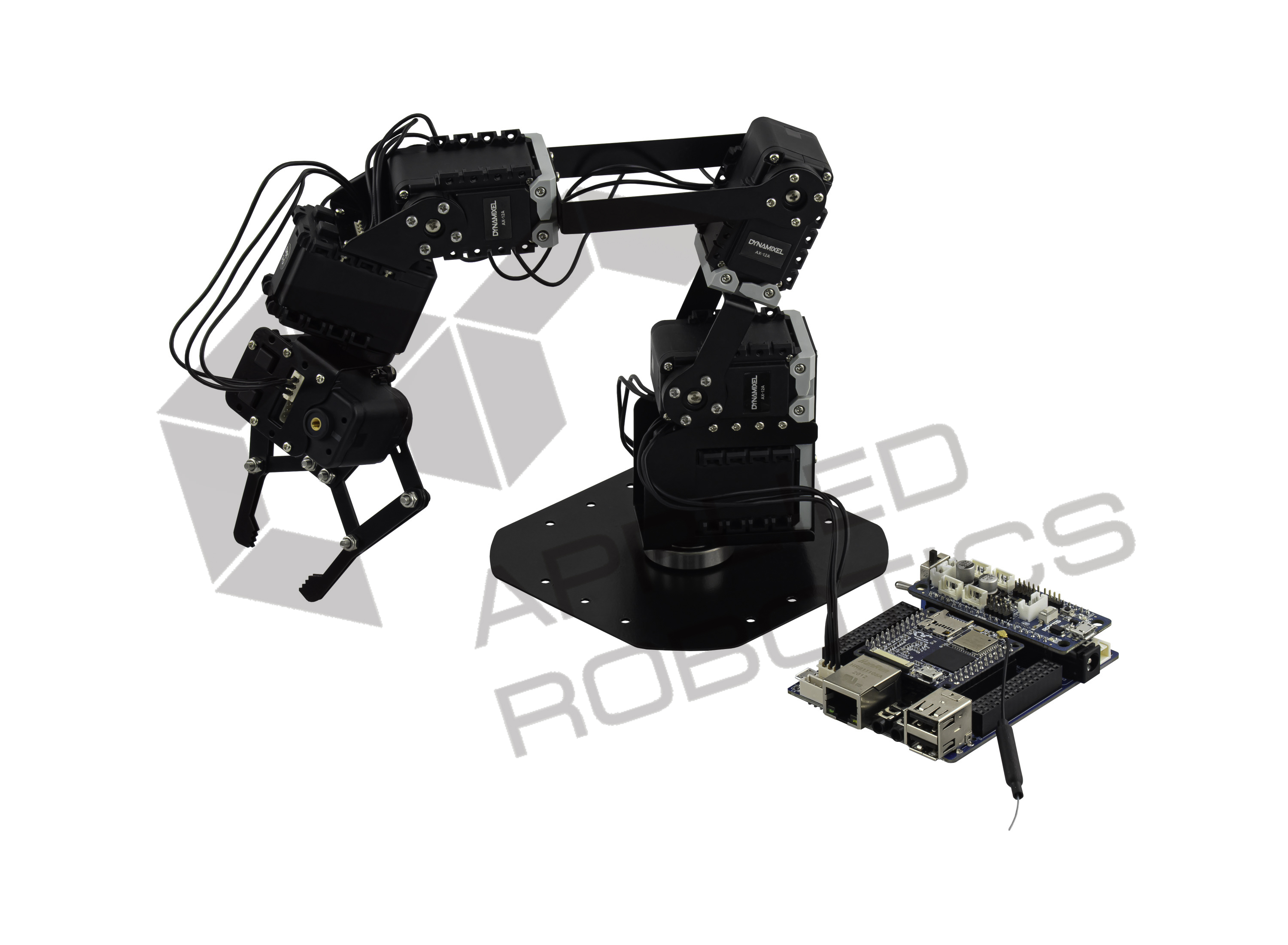
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.

Комплектация
- Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, 23 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, 30 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с DELTA кинематикой, 10 шт
- Крепежные элементы (винты различного номинала и длины), 64 шт
- Крепежные элементы (гайки различного номинала), 64 шт
- Элементы для создания шарнирных соединений, 7 шт
- Соединительные кабели различной длины, 7 шт
- Интеллектуальный сервомодуль с интегрированной системой управления, 7 шт
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров - положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу. Имеется режим постоянного вращения выходного вала.
Технические характеристики привода:
Нижняя граница диапазона допустимого напряжения питания - 9 В. Верхняя граница диапазона допустимого напряжения питания - 12 В. Передаточное отношение редуктора - 254. Максимальный момент - 1,5 Н*м. Нижняя граница диапазона номинальной скорости вращения в режиме постоянного вращения - 0 об/мин. Верхняя граница диапазона номинальной скорости вращения в режиме постоянного вращения - 59 об/мин. Максимальная величина угла поворота в режиме позиционного управления - 300 угловых градусов. Разрешающая способность - 0,29 угловых градусов. Размеры сервомодуля (ДхШхВ) - 32х50х40 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом. Имеется конструктивная, интерфейсная и электрическая совместимость робототехнического контроллера с опционально встраиваемым внешним микрокомпьютером.
Робототехнический контроллер обеспечивает возможность программирования с помощью средств языков С/С++, Python и свободно распространяемой среды Arduino IDE, а также управления моделями робототехнических систем с помощью среды ROS. Количество портов для подключения опционально встраиваемого внешнего микрокомпьютера - 48 шт. Имеется встроенный опциональный микрокомпьютер.
Технические характеристики робототехнического контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи - 6,8 В. Верхняя граница диапазона питания внешней аккумуляторной батареи - 12 В. Порты для подключения внешних цифровых устройств - 16 шт. Порты для подключения внешних аналоговых устройств - 10 шт. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу - 1 шт. Кол-во портов тип 4pin для подключения сервомодулей по последовательному интерфейсу - 2 шт. Программируемые кнопки - 1 шт. Интерфейс PWM - 1 шт. Интерфейс UART - 4 шт. Интерфейс I2C - 2 шт. Интерфейс SPI - 2 шт. Интерфейс для подключения микрофона - 1 шт. Интерфейс для подключения динамиков - 1 шт.
Технические характеристики встроенного опционального микрокомпьютера:
Количество вычислительных процессорных ядер - 4 шт. Оперативная память - 512 МБайт. Имеется встроенные интерфейсы WiFi и Bluetooth. Количество слотов для подключения карты памяти microSD - 1 шт. Встроенный микрофон - 1 шт.
В состав набора входит учебный комплект, включающий в себя учебное пособие, набор библиотек трехмерных элементов для прототипирования моделей манипуляционных роботов, а также программное обеспечение для работы с набором. Учебное пособие содержит материалы по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA (рычажная кинематика), платформа Стюарта), инструкции по проектированию роботов, инструкции и методики осуществления инженерных расчетов при проектировании (расчеты нагрузки и моментов, расчет мощности приводов, расчет параметров кинематики), инструкции по разработке систем управления и программного обеспечения для управления роботами, инструкции и методики по разработке систем управления с элементами искусственного интеллекта и машинного обучения.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.
Ultimate 2.0 - это флагманский набор от Makeblock для студентов и преподавателей, поклонников Raspberry Pi и Arduino, инженеров, механиков, программистов и просто желающих постичь эти направления. Набор позволяет собрать 10 стандартных конструкций роботов по прилагаемым инструкциям, а также благодаря высокой совместимости деталей позволит вам бысто и легко реализовать свою идею.
Особенности:
- больше 10 стандартных конфигураций роботов;
- хороший выбор для изучения принципов STEM, робототехники, электроники, графического программирования, а также программирования Arduino или в Python;
- прочный алюминиевый анодированный профиль;
- три мощных двигателя с энкодерами позволяют контролировать каждый шаг робота;
- беспроводное управление через Bluetooth.
Роботизированная рука на гусеничном ходу
Гусеничные шасси позволяют легко преодолевать препятствия, а привод захвата - поднимать и перемещать предметы.

Робот - бармен
Роботизированный бармен создан на мобильном шасси с поддержкой бутылки с напитком с возможностью наклона. Он может налить лимонад в стакан и привезти его вам.

Камера на шасси (мини Долли)
Камера на мобильном шасси и возможностью поворота на 360 градусов. Установите на робота мобильный телефон или фотокамеру и начните снимать! Вы можете задать путь движения камеры.

3D - камера
Вращающаяся на 360 градусов платформа позволяет снять панорамный вид объекта или сделать круговую съёмку небольшого объекта. При установке соответствующего приложения возможна реализация 3D-сканирования.

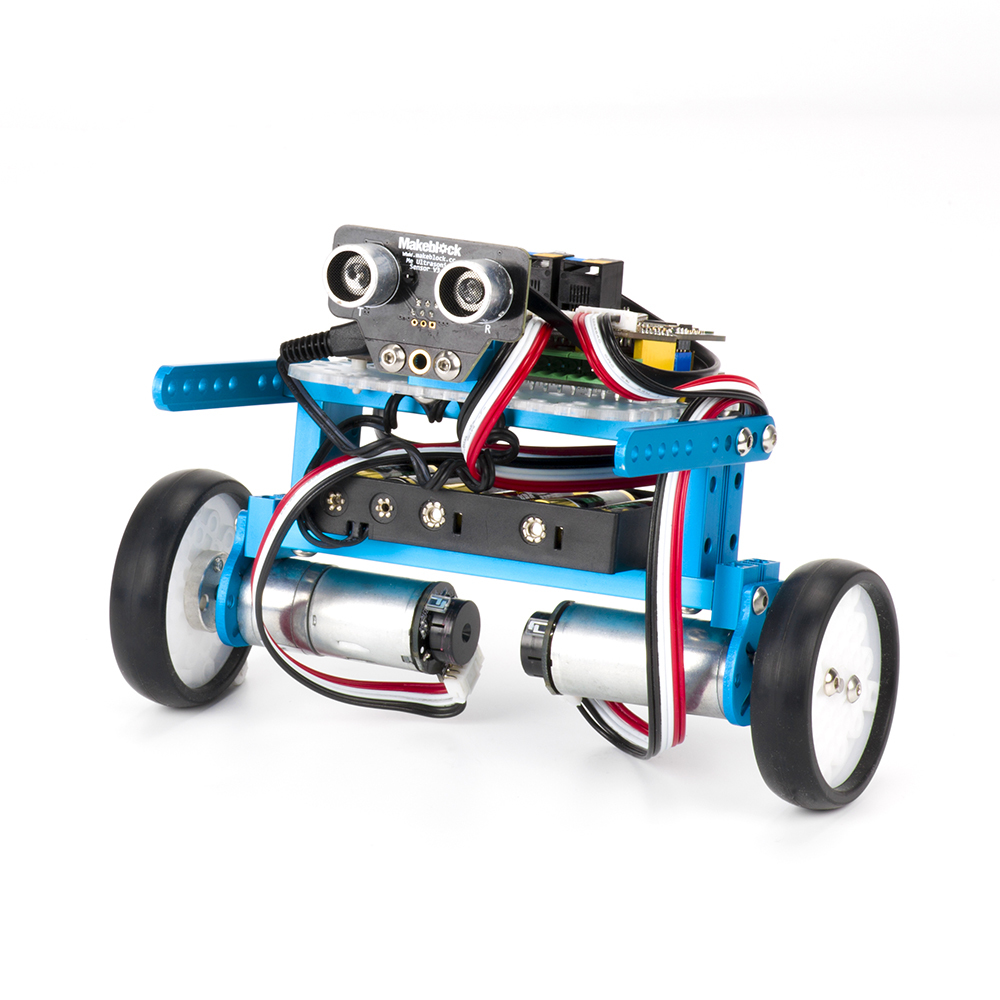
Балансирующий робот
Робот стоит на двух колёсах, управляемых двигателями с энкодерами. Он может двигаться вперёд и назад, балансируя при этом на двух колёсах.
Технические характеристики контроллера MegaPi
- Микроконтроллер - ATmega2560-16AU
- Напряжение питания - 6. 12 В постоянного тока
- Рабочее напряжение - 5 В
- Порты ввода-вывода - 43
- Последовательные порты - 3
- Интерфейс I2C
- Интерйефс SPI
- Аналоговые входы - 15
- Ток на порту - 20 мА
- Память FLASH - 256 кб
- Память SRAM - 8 кб
- Память EEPROM - 4 кб
- Частота - 16 МГц
- Размеры - 85 х 63 мм
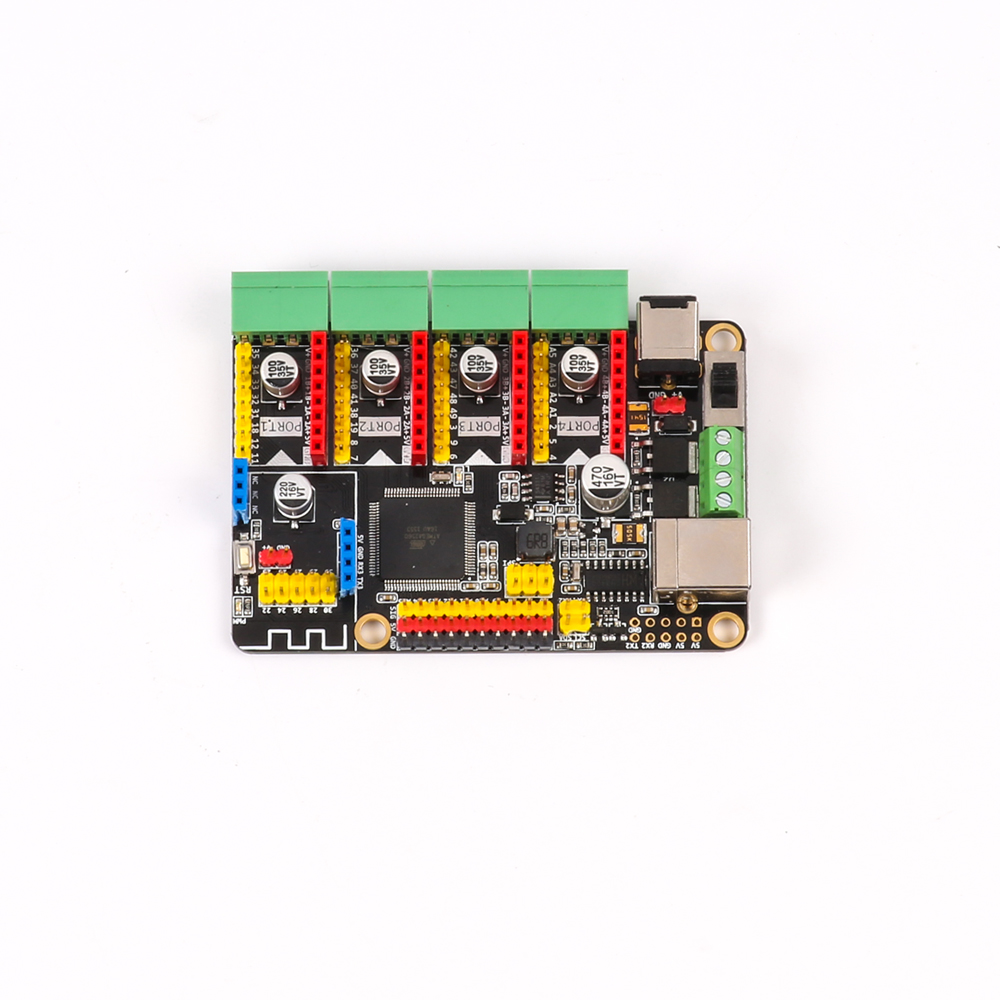
Цветовая маркировка портов платы Mega Pi определяет их назначение:
- красный - силовой выход
- жёлтый - ввод-вывод
- синий - интерфейс беспроводной связи
- чёрный - общий
- зелёный - силовой выход
Графическое программирование
Графическое программирование в программе mBlock для самого начального уровня изучения. Позволяет создавать проекты и интерактивные приложения с помощью простого перетаскивания блоков с командами.

Программирование через iPad/Планшет
Ultimate 2.0 можно программировать не только на компьютере, но и через iPad и планшет. С простым в использовании приложением Makeblock HD вы можете исследовать существующие проекты или создавать свои.

Технические характеристики
- алюминиевый профиль
- пластиковые шестерни для ремня 90Т
- колёса и гусеницы
- кабели
- прочие принадлежности
- Mega Pi
- Плата Mega Pi RJ25
- Модуль Bluetooth
- Драйверы двигателя - 4 шт
- Двигатели с энкодером - 3 шт
- Ультразвуковой датчик расстояния
- Датчик отслеживания линии
- Трехосевой акселерометр и гиродатчик
- Адаптер RJ25
- Адаптер управления затвором фотоаппарата
- Захват
Создание моделей по инструкции
Возможные конструкции - более 10 (к трём прилагается руководство на бумаге)
Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.
Комплектация
Сервомодуль интеллектуальный Dynamixel AX-12A – 7 шт
Интеллектуальный сервомодуль со встроенной 3х-контурной системой управления и последовательным сетевым интерфейсом управления.
Программируемый контроллер OpenCM9.04-C – 1 шт
Программируемый контроллер, управляемый с помощью Arduino IDE для подключения интеллектуальных сервомодулей по последовательному интерфейсу.
Периферийная плата универсального робототехнического контроллера STEM Board – 1 шт
Периферийная плата программируемого контроллера для подключения "Arduino-совместимых" устройств, а также встраиваемого микрокомпьютера с ОС Linux.
Периферийная плата обеспечивает возможность работы с интерфейсами - SPI, I2C, TTL, UART, PWM, цифровые и аналоговые порты для подключения внешних устройств, а также WiFi или Bluetooth для коммуникации со внешними устройствами
Одноплатный микрокомпьютер – 1шт
Одноплатный микрокомпьютер обладает техническим характеристикам: кол-во ядер встроенного микрокомпьютера - не менее 4, тактовая частота ядра - не менее 1,2 ГГц, объем ОЗУ - не менее 512 Мб
Программируемый контроллер DXL-IoT – 1 шт
Программируемый контроллер для управления интеллектуальными сервомодулями и исполнительными механизмами, а так же сбора и обработки данных с помощью облачных сервисов "Интернета вещей".
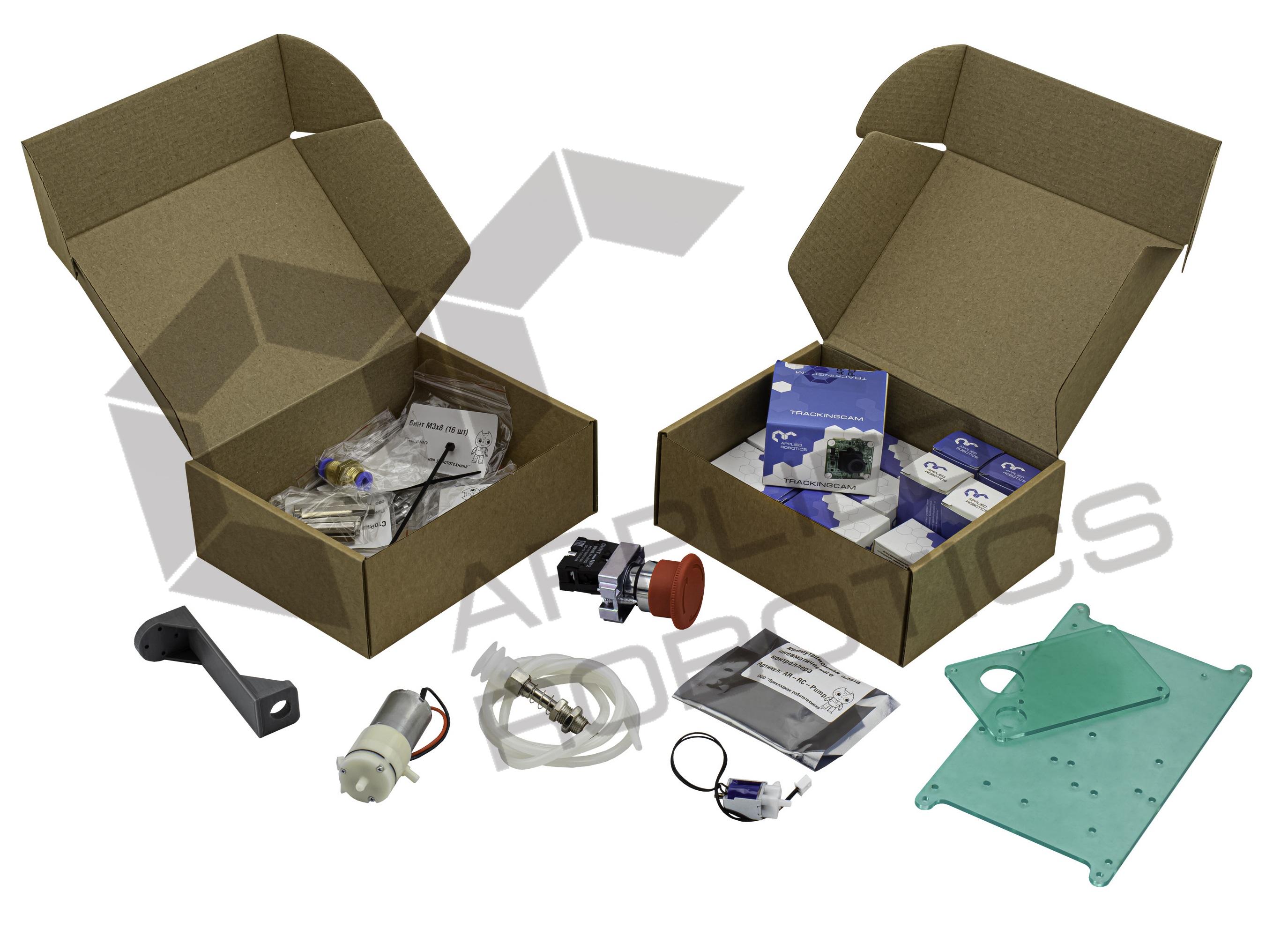
Модуль технического зрения TrackingCam – 1 шт
Модуль технического зрения для обработки простейших изображений и распознавания графических объектов.
Сетевой адаптер SMPS 12V 5A PS-10 [EU-220V] – 1 шт
Сетевой адаптер для электропитания учебных моделей РТК посредством сети 220В.
Преобразователь интерфейсов USB-DXL – 1 шт
Преобразователь интерфейсов для управления интеллектуальными сервомодулями напрямую с ПК.
Адаптер питания для сервомодулей SMPS2Dynamixel – 1 шт
Адаптер для подачи электропитания на интеллектуальные сервомодули.
Комплект металлических конструктивных элементов – 1 шт
Комплект металлических пластин и скоб для сборки демонстрационных моделей, а также соединительные кабели.
Комплект крепежных элементов – 1 шт
Комплект крепежных элементов (винты и гайки различного номинала), а также соединительные кабели.
Комплект интеллектуальных информационных устройств – 1 шт
Комплект интеллектуальных датчиков.
Методическое пособие по разработке РТК (манипуляторы с угловой кинематикой, плоскопараллельной, Delta, Scara) – 1 шт
Учебное пособие описывающее поэтапный процесс моделирования конструкции моделей промышленных РТК различного типа, а также разработки систем управления различной сложности.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.

Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов "Образовательный робототехнический комплект "СТЕМ Мастерская". Расширенный" позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.
Комплектация
- Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, 23 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, 30 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с DELTA кинематикой, 10 шт
- Крепежные элементы (винты различного номинала и длины), 64 шт
- Крепежные элементы (гайки различного номинала), 64 шт
- Элементы для создания шарнирных соединений, 7 шт
- Соединительные кабели различной длины, 7 шт
- Интеллектуальный сервомодуль с интегрированной системой управления, 7 шт
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров - положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу. Имеется режим постоянного вращения выходного вала.
Технические характеристики привода:
Нижняя граница диапазона допустимого напряжения питания - 9 В. Верхняя граница диапазона допустимого напряжения питания - 12 В. Передаточное отношение редуктора - 254. Максимальный момент - 1,5 Н*м. Нижняя граница диапазона номинальной скорости вращения в режиме постоянного вращения - 0 об/мин. Верхняя граница диапазона номинальной скорости вращения в режиме постоянного вращения - 59 об/мин. Максимальная величина угла поворота в режиме позиционного управления - 300 угловых градусов. Разрешающая способность - 0,29 угловых градусов. Размеры сервомодуля (ДхШхВ) - 32х50х40 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом. Имеется конструктивная, интерфейсная и электрическая совместимость робототехнического контроллера с опционально встраиваемым внешним микрокомпьютером.
Робототехнический контроллер обеспечивает возможность программирования с помощью средств языков С/С++, Python и свободно распространяемой среды Arduino IDE, а также управления моделями робототехнических систем с помощью среды ROS. Количество портов для подключения опционально встраиваемого внешнего микрокомпьютера - 48 шт. Имеется встроенный опциональный микрокомпьютер.
Технические характеристики робототехнического контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи - 6,8 В. Верхняя граница диапазона питания внешней аккумуляторной батареи - 12 В. Порты для подключения внешних цифровых устройств - 16 шт. Порты для подключения внешних аналоговых устройств - 10 шт. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу - 1 шт. Кол-во портов тип 4pin для подключения сервомодулей по последовательному интерфейсу - 2 шт. Программируемые кнопки - 1 шт. Интерфейс PWM - 1 шт. Интерфейс UART - 4 шт. Интерфейс I2C - 2 шт. Интерфейс SPI - 2 шт. Интерфейс для подключения микрофона - 1 шт. Интерфейс для подключения динамиков - 1 шт.
Технические характеристики встроенного опционального микрокомпьютера:
Количество вычислительных процессорных ядер - 4 шт. Оперативная память - 512 МБайт. Имеется встроенные интерфейсы WiFi и Bluetooth. Количество слотов для подключения карты памяти microSD - 1 шт. Встроенный микрофон - 1 шт.
В состав набора входит учебный комплект, включающий в себя учебное пособие, набор библиотек трехмерных элементов для прототипирования моделей манипуляционных роботов, а также программное обеспечение для работы с набором. Учебное пособие содержит материалы по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA (рычажная кинематика), платформа Стюарта), инструкции по проектированию роботов, инструкции и методики осуществления инженерных расчетов при проектировании (расчеты нагрузки и моментов, расчет мощности приводов, расчет параметров кинематики), инструкции по разработке систем управления и программного обеспечения для управления роботами, инструкции и методики по разработке систем управления с элементами искусственного интеллекта и машинного обучения.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.
Читайте также: