Механизм для качания детской кровати своими руками
Прошло чуть больше года с момента написания моей первой статьи про устройство для качания детской кроватки. За это время мною был разработан новый пульт управления с экраном, а затем и web-интерфейс к этому устройству. Если интересно узнать подробности — добро пожаловать под кат.
Вначале — пара слов о самом устройстве, небольшое краткое содержание предыдущих серий.
Итак, устройство предназначено для качания детской кроватки с маятниковым механизмом. На неподвижную часть кроватки устанавливается приводной блок с электромагнитом и электроникой внутри. На подвижной части закрепляется неодимовый магнит. Пролетая над электромагнитом, постоянный магнит наводит ЭДС, по форме которой определяется момент подключения этого же электромагнита к источнику питания. Таким образом, электромагнит в нужные моменты времени подталкивает постоянный магнит и, следовательно, подвижную часть кроватки. В те же моменты времени, когда электромагнит не запитан, он играет роль датчика положения подвижной части кроватки.
Первый экземпляр устройства я сделал для себя. Потом оказалось, что такие устройства можно продавать, и уже три с небольшим года я и занимаюсь этим с разной степенью успеха. Сейчас небольшими партиями производятся четыре модели устройства и продаются через одного из крупных российских производителей детской мебели.
В первой модели устройства для качания детской кроватки в качестве пульта управления используется вот такой пульт-брелок. На нем четыре кнопки, имеющие функциональность «Пуск», «Стоп», «Сильнее» и «Слабее». Соответственно, с помощью этого пульта можно запускать и останавливать качание, а также менять его интенсивность – выбирать один из шести возможных уровней. Брелок работает на частоте 433 МГц и никакой обратной связи не имеет.
Через какое-то время был разработан упрощенный вариант устройства (модель 0), вообще без пульта управления. Качнули кроватку рукой – и она продолжает качаться неограниченно долго. Остановили – качание прекратилось.
При разработке следующей, второй модели устройства качания (модель 2) основной задачей было добавить таймер укачивания и запуск качания от крика ребенка. И это оказалось проблемой.
Дело в том, что время качания нужно как-то задавать, в часах и минутах. И чувствительность микрофона тоже как-то было бы неплохо устанавливать. А для всего этого нужен интерфейс, и «слепого» пульта с четырьмя кнопками здесь явно недостаточно.
Конечно, первой мыслью было сделать на корпусе устройства какую-нибудь индикацию. Поставить там несколько светодиодов и/или небольшой дисплей. А управлять также, с помощью этого маленького пульта. Однако, ущербность этого решения заключается в том, что устройство в общем случае устанавливается в недоступном месте, где-нибудь на задней стенке кроватки у стены. И индикации на корпусе в этом случае просто не будет видно.
Так было принято решение сделать пульт управления с дисплеем. Чуть меньше года разработки – и устройство с пультом готово!
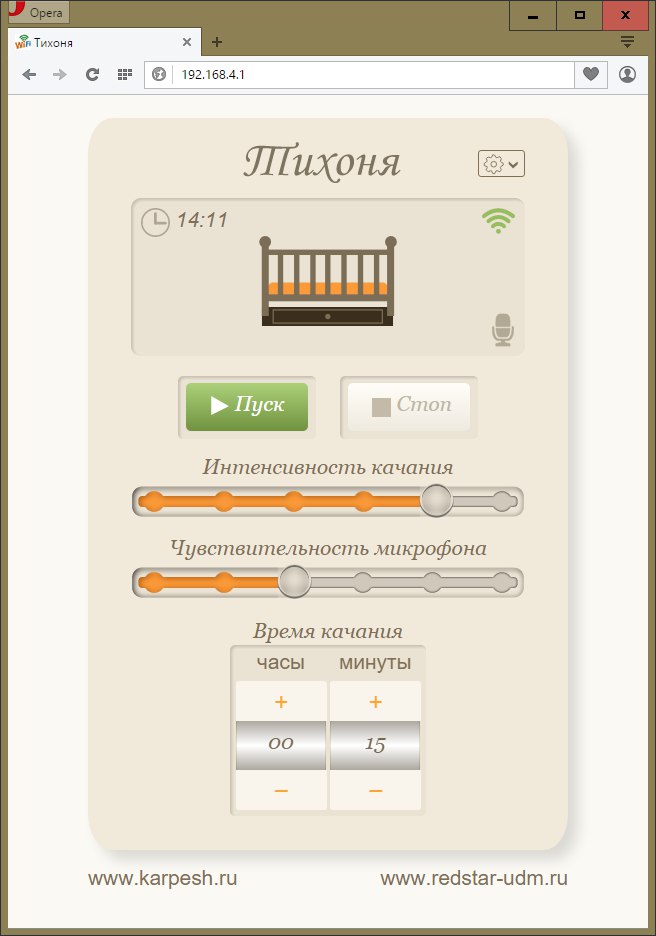
Внутри пульта – ATMega32A, в качестве дисплея – экран от Nokia 1202, приемопередатчик – NRF24L01+. Корпус – готовый стандартный, клавиатура – пленочная. С пульта можно задавать время укачивания, чувствительность микрофона, интенсивность качания, а также запускать и останавливать процесс. Для случая нахождения нескольких кроваток в одном помещении предусмотрена возможность смены канала управления, благо NRF24L01+ это легко позволяет.
Пульт и устройство все время находятся в диалоге между собой. Сделано это для обратной связи – на экране отображается актуальное состояние устройства, а именно — идет ли процесс качания или нет (если идет — изображение кроватки на пульте тоже качается), сколько времени осталось качать, каковы текущие уставки интенсивности укачивания и чувствительности микрофона. Для того, чтобы батарейки в пульте управления не садились слишком быстро, предусмотрен режим сна – если на кнопки пульта никто не нажимает в течение получаса, пульт «засыпает».
После разработки и запуска «Модели 2» пусть в скромное, но все же производство, я продолжал думать об усовершенствовании устройства качания. Вот было бы здорово, думал я, если бы можно было управлять устройством с сотового телефона! Или с планшета. Я вот, например, когда сплю, кладу рядом с собой сотовый телефон. Там и будильник, и почта, и почитать что-нибудь можно перед сном. И ведь наверняка многие молодые родители делают также. Зачем же использовать отдельный пульт управления устройством качания, когда вот она – универсальная вещь – смартфон или планшет! Пусть он и будет пультом управления, думал я.
Какие более-менее подходящие радиоинтерфейсы есть в современном смартфоне? Bluetooth и Wi-Fi. Поначалу я рассматривал возможность управления устройством качания по Bluetooth. Из плюсов – легко реализовать со стороны устройства. Можно применить модуль – «мост» Bluetooth-UART, вот задача и решена.
Правда, со стороны смартфона – сплошные проблемы.
Начать с того, что держать постоянно включенный Bluetooth на телефоне – плохая идея. Далее, под каждую ОС придется писать собственный софт, это как минимум, два приложения – под Android и под iPhone. А ведь есть еще и телефоны под Windows Phone… Немного углубившись в тему, я обнаружил, что c iPhone вообще может ничего не получиться, там вроде бы есть какие-то ограничения. Ну и даже если все получится. Приложения нужно сначала написать. Потом опубликовать в соответствующих магазинах. Потом их нужно поддерживать в работоспособном состоянии, исправлять ошибки, реагировать на замечания пользователей. Проблема в том, что я никогда ничего из этого не делал, для меня это «темный лес с партизанами» и по-хорошему для этой части работы нужно нанимать знающего человека. И нанимать не разово, а постоянно с ним потом сотрудничать в плане поддержки программ. Ну или учиться всему самому. Получается как-то дорого, да и технически некрасиво. Поэтому Bluetooth отпадает.
А потом я узнал о существовании ESP8266.
Да, об этих модулях уже очень много здесь писали, кроме того, есть отличнейший русскоязычный форум по ним. Чуть меньше года назад, начав рассматривать этот модуль для своего применения, я долго не мог составить мнение о его возможностях. Да и сейчас, судя по вопросам новичков на том же форуме, я вижу, что многие не представляют, на что способен этот модуль (чип).
Здесь надо сказать важную вещь – изначально ESP8266 «комплектовался» очень «сырой» и «глючной» китайской SDK, в связи с чем чип нельзя было использовать для решения настоящих «боевых» задач. Так, поиграть, поморгать светодиодом, конечно, можно было, но сделать что-то стабильно работающее было невозможно.
За последний год, однако, ситуация коренным образом изменилась. На русскоязычном форуме, посвященном этому чипу, одним из его участников был реализован проект – «Разработка ‘библиотеки’ малого webсервера на ESP8266». Удивительный человек-инкогнито, скрывающийся под ником pvvx, практически в одиночку создал прошивку для ESP8266, которая позволяет в полной мере раскрыть возможности этого чипа. Исходники проекта выложены в открытый доступ, автор разрешает их использовать как угодно, в том числе и в коммерческих целях. Более того, pvvx продолжает дополнять сборку новыми возможностями, а также, что очень важно, активно присутствует на форуме и не устает (ну, наверное) консультировать новичков (и не новичков тоже).
В результате этой, не побоюсь пафоса, выдающейся работы, стало возможно (помимо многого другого) снабдить какое-либо устройство полноценным стабильно работающим web-интерфейсом. Этим применением возможности чипа и прошивки не ограничиваются, но мне нужно было решить именно эту задачу.
Преимущества использования ESP8266 очевидны, и более того, каких-то других вариантов, сравнимых по цене и функционалу, на данный момент нет.
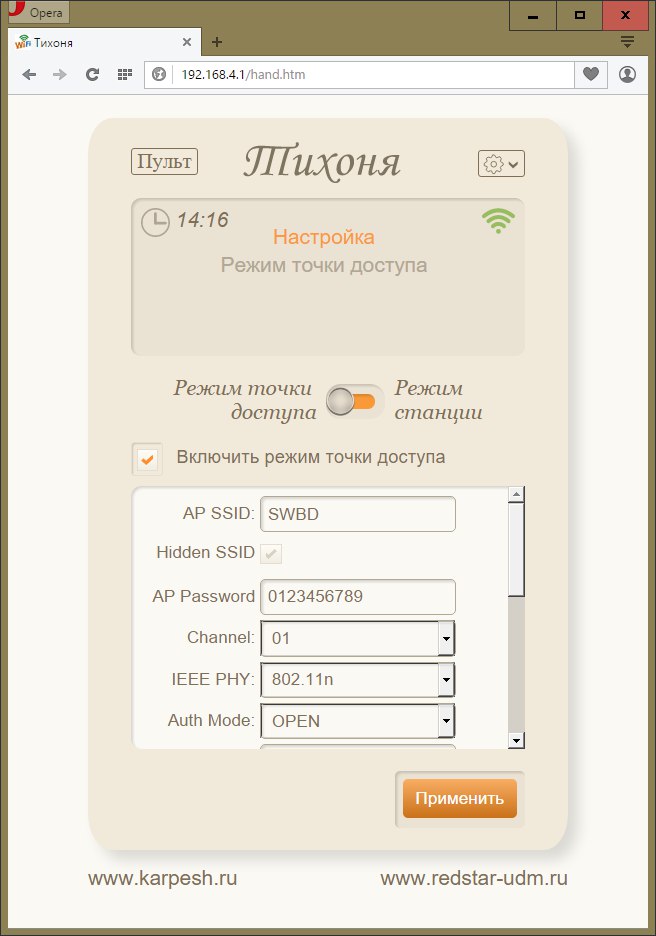
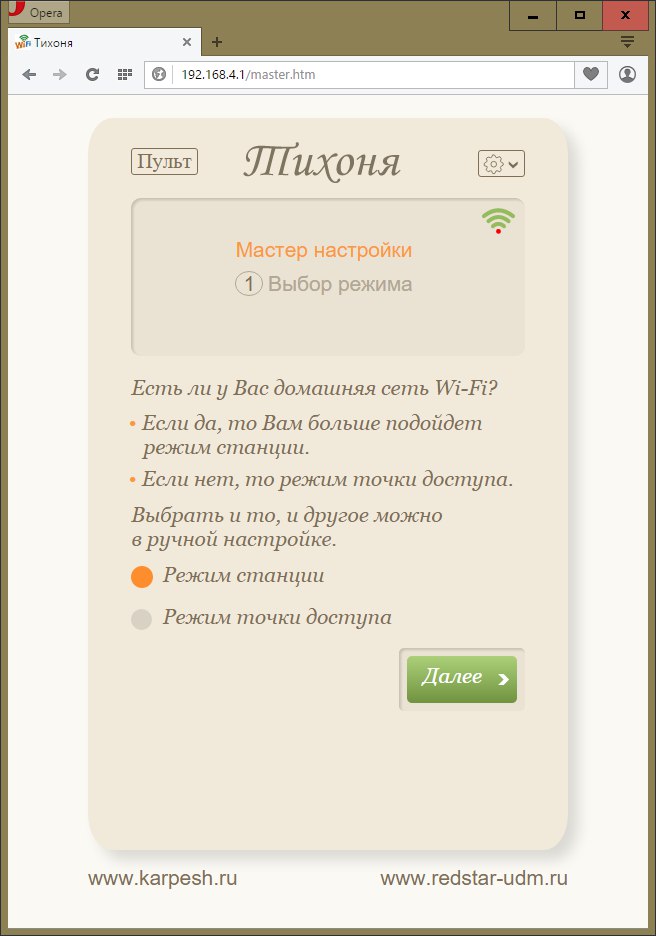
Действительно, при цене около 170 рублей на модуле ESP8266 можно организовать web-сервер с интерфейсом управления устройством, что позволяет не писать вообще никаких программ ни под какие операционные системы, только один раз сделать web-интерфейс. Модуль может работать как точка доступа и как станция, а также одновременно в двух этих режимах. Например, подключившись к модулю как к точке доступа, можно настроить его параметры связи, а потом, при желании, подключить модуль как станцию к своей домашней Wi-Fi сети. Сборка («свалка», как почтительно называет ее автор) имеет множество настроек (больше 250), доступных из web-интерфейса.
Конечно, существуют и другие прошивки для ESP8266, но ни одна из них не обладает такими возможностями, такой стабильностью и качеством работы, как сборка от pvvx (это мое субъективное мнение, применительно к моей задаче).
На основе этой прошивки и был разработан web-интерфейс для устройства качания детской кроватки. Непосредственно сама веб-часть была написана таким образом, чтобы сайт корректно отображался на различных экранах с разными размерами и разрешениями.
Конечно, аппаратную часть устройства пришлось здорово переделать (по факту – сделать заново). Алгоритм качания теперь реализован на микроконтроллере Attiny441, взаимодействие с ESP8266 посредством UART. Питание 3.3 вольта выполнено с помощью ST1S10. Вариант платы с ошибкой (исправлена навесным монтажом):
Таким образом, сейчас стало как никогда просто «прикрутить» Wi-Fi и web-интерфейс к чему угодно. При этом система будет работать вполне стабильно, а стоимость компонентов составит всего-навсего около 250 рублей (если подсчитать всю обвязку, не только сам модуль ESP8266).
Интерфейсы для устройства качания детской кроватки – от брелока до Web
Создание устройства качания детских кроваток с дугообразным полозом

В предыдущих статьях (раз, два) я описывал устройство качания детской кроватки с маятниковым механизмом. Прошло всего каких-то пять лет – и теперь вашему вниманию хочу представить следующую разработку – устройство качания для кроватки с дугообразным полозом.Ах, да! Предвидя вопросы: «а зачем качать?», «а качать-то, наверное, вредно?», «а вот у меня дети никогда в кроватке не качались – и выросли достойными людьми!», «не нужно приучать детей к качанию, в Спарте таких вообще не любили!» и т.д. – отвечаю: это не предмет рассмотрения данной статьи. Если звезды зажигают – сами понимаете. Всегда качали – это в культуре, причем разных народов. Люльки, колыбели, «бешики» — вот это вот всё. И сейчас тоже – кроватки-качалки, кроватки с маятниковым механизмом. Качали, качают и качать будут. И мы с женой – тоже качали, конечно.
А раз так – будем автоматизировать!
Каким должно быть устройство для качания кроватки? Во-первых, бесшумным. По возможности – абсолютно бесшумным. Никакого жужжания, писка, щелчков и тиканья. Во-вторых – надежным. Чем меньше движущихся частей – тем лучше. Чем меньше механических передач – тем лучше. В-третьих – простым в установке. В идеале – прикрутить на пару-тройку саморезов, а то и приклеить на скотч – и готово. В-четвертых – эффективным. Т.е. качать должно хорошо и, если нужно, сильно. В-пятых – кроватка должна иметь возможность раскачивания вручную. Следовательно, желательно отказаться от передач с большим коэффициентом. В-шестых – устройство должно обладать рядом функций – несколько «скоростей», т.е. интенсивностей качания, таймер, датчик плача, датчик движения, дистанционное управление. И в-седьмых – себестоимость устройства не должна быть слишком большой. Иначе – какой смысл, ведь изделие изначально задумывается коммерческим.
Исходя из обозначенных требований – каким может быть принцип действия устройства качания кроватки на дугах? Самое простое – двигатель с передачей, преобразующей вращательное движение в возвратно-поступательное. Шкив с веревочкой или ниткой. Шестерня и зубчатая рейка. Коленвал и шатун. Червячная передача. Винтовая передача (вариант домкрата). И прочее, и прочее.
Но все эти идеи так себе. Двигатель будет шуметь, а передача не даст или будет затруднять качать кроватку вручную. Нужен прямой привод, без передач. И, так как нам не нужно вращательное движение, это должен быть линейный привод, линейный двигатель. Например, цилиндр, из которого будет выдвигаться шток. Тогда цилиндр можно прикрепить к полозу кроватки, а штоком она будет отталкиваться прямо от пола.
В порядке абсурда
В этом месте я начал было задумываться о пневматике или даже гидравлике, но вовремя остановился.
Линейный двигатель, если совсем просто – это двигатель с развернутым в линию статором (неподвижной частью) и соответствующим «ротором» (подвижной частью). Как и обычный вращающийся двигатель, линейный по принципу действия может быть шаговым, синхронным, асинхронным и много ещё каким. По конструкции линейные двигатели также могут быть очень разными – с магнитами, без магнитов; со стальным магнитопроводом или без него; с подвижными катушками или подвижными магнитами и прочее и прочее. Каким же должен быть двигатель для устройства качания кроватки?
И далее был поиск. Я читал материалы, найденные по ключевым словам «voice coil motor/actuator» и по другим похожим, смотрел, что выпускается сейчас разными фирмами – а вдруг что-то готовое подойдет? Потом узнавал цену – нет, не подойдет…
насколько я понял, в России такие изделия вообще не выпускаются. В Европе – пожалуйста, в Китае – тоже много. А у нас – как-то нет (может, конечно, просмотрел, поправьте, если так).
В результате я нашел два очень полезных для меня ресурса – сайт, на котором корейский энтузиаст-самодельщик описывает разработку и создание актуатора и подробный и широкий по охвату труд – магистерскую диссертацию «THE DESIGN OF MOVING MAGNET ACTUATORS FOR LARGE-RANGE FLEXURE-BASED NANOPOSITIONING» by David B. Hiemstra (можно найти в поиске), в которой подробно описано не только создание действующего актуатора, но и содержится огромное количество сведений «вокруг» этого вопроса. Отдельно стоит отметить часть работы, в которой автор делает обзор инноваций в проектировании актуаторов – очень интересно почитать, рекомендую.
Устройство качания медленно возникало в моем воображении, как черно-белая фотография в кювете с проявителем. Детали были еще туманны, но основная идея становилась всё более понятна. Статор, состоящий из двух встречно включенных катушек внутри ферромагнитного ярма, и шток – стержень с надетым на него кольцевым магнитом. Возможно, полюсы – металлические шайбы, надетые на тот же стержень. Вот как-т о так.
Но какие должны быть катушки? Какой длины, диаметра, каким проводом мотать, сколько витков? Какое между ними должно быть расстояние? Какой магнит нужен для штока, нужны ли полюсы или можно без них? Как вообще выбрать всю геометрию изделия, чтобы она была оптимальна? Некоторые соображения общего плана приведены в упомянутой выше работе, но как определить параметры конкретно для моего случая? Неужели нужно будет изготавливать несколько вариантов наугад?
К счастью, нет. Умные люди уже давно придумали моделирование.
Надо сказать, что устройство для качания кроваток с маятниковым механизмом, разработанное ранее, я моделировал в COMSOL Multiphysics. Это впечатляющий продукт, позволяющий моделировать явления из очень разных областей физики, в том числе, конечно, и электромагнитные явления. Моделируются электромагнитные системы там в трехмерном виде, что, с одной стороны, является универсальным подходом, а с другой – требует вычислительных мощностей и времени – как на освоение программы (хотя «порог входа» невысокий, обучающих материалов много), так и непосредственно на вычисления. Процесс моделирования происходит в формате «что-то изменил – запустил расчет – ушел чай пить». Продукт коммерческий, если это важно.
А еще есть FEMM (Finite Element Method Magnetics, Magnetic Analysis). Некоммерческая программа, моделирует в 2D, но этого во многих случаях достаточно. А к ней «добавление»: DoSA-Open_2D (Designer of Solenoid & Actuator) от автора, насколько я понял, того же сайта. «Добавление» специально сделано для простого моделирования актуаторов и соленоидов. Система должна быть осесимметричная, для анализа рисуется ее сечение. Указывается материал элементов, их подвижность или неподвижность, запускается расчет – и через несколько секунд результат готов. Для моего случая программа оказалось идеальной.
на упомянутом сайте описаны еще несколько систем моделирования, если интересно – почитайте.
Итак, моделирование позволило выбрать некоторые параметры первого прототипа. Что ж, нарисуем, изготовим, посмотрим на результат.
Модель В разрезе
Главное – оно работает, кроватка качается. Значит, принципиально всё правильно. Теперь нужно придать устройству качания приличный товарный вид.
И вот здесь-то и возникли многочисленные вопросы. Как выглядит современное бытовое устройство? Практически всегда это – пластиковый корпус. В некоторых случаях – металлический. Однако для малых серий именно бытовых приборов изготовление пластикового корпуса – предприятие очень дорогое и, соответственно, с очень сомнительной окупаемостью. Нужно как-то выкручиваться из этой реальности, что-то придумывать. Да, было бы здорово найти готовый пластиковый корпус и скомпоновать всё туда. Или сделать металлическое изделие, покрасив его, например, порошковой краской. Или взять какой-нибудь профиль – алюминиевый, пластиковый, отрезать из него корпус, а сверху наклеить наклейку или термоусадку, как на бутылку с газированной водой. Ну допустим.
Но дело же не только в корпусе. Нужно ещё придумать, как сделать конструкцию технологичной. Катушки нужно на что-то намотать, на какой-то каркас. Шток должен двигаться в подшипниках скольжения, которые в свою очередь должны быть как-то закреплены и быть как минимум соосны. Печатная плата также должна быть как-то размещена и закреплена. Ну что ж, попробуем решить эту задачку «в лоб». Алюминиевый каркас, нержавеющий немагнитный шток, стальной корпус – он же ярмо, алюминиевые крышки. В результате пробы получилось вот это:
На основе этой модели были сделаны чертежи, которые я разослал на многие производства, как российские, так и китайские, чтобы узнать примерную цену комплекта.
Я подозревал, что получится, наверное, дороговато. Но цена оказалась высокой настолько, что никакого смысла изготавливать такую конструкцию и вовсе не было. Для изготовления требовалось использование токарно-фрезерных станков с ЧПУ, нужны были ручные операции типа нарезания резьбы, разворачивания отверстий развертками и прочее. И каждая такая операция – дорога. Даже при партии в 100 штук. Даже в Китае.
Признаюсь, это был момент уныния и разочарования. Да, так мелкосерийное изделие не сделать. Нужен какой-то принципиально другой подход именно к конструированию. Нужно делать как-то вообще не так, как-то принципиально иначе.
Что в этой конструкции самое дорогое? Детали, выточенные на токарном станке. От них нужно отказаться. Все ручные операции, требующие точного позиционирования – сверление, нарезание резьбы – туда же. А что нам вообще доступно? Лазерная резка. Металла, пластика, фанеры. Но как из плоской вырезанной детали сделать, например, каркас катушки? Или магнитопровод, охватывающий эту катушку?
Есть такое понятие – инсайт. Внезапное озарение, прозрение. Вот так думал-думал над какой-то проблемой, а потом что-то «щелкнуло» – и вдруг понял, как надо. Упало, к примеру, яблоко на голову – и вот уже всё понятно: пора собирать урожай картофеля.
И первый такой инсайт – а не надо каркас. У нас есть самоспекающийся провод, и мы уже неплохо научились с ним работать. Катушки будут бескаркасные. Второе «яблоко» - да и ярмо необязательно цилиндрическим делать, вот у различных реле и соленоидов ярмо из пластин состоит – и ничего. И далее: все детали должны быть – плоскими. Никакой резьбы – используем закладные квадратные шайбы. Несущая конструкция будет из металла и пластика, поликарбоната. А корпус… пусть будет из фанеры.
Нарисуем. Изготовим. Попробуем. И снова. И ещё несколько раз (и, похоже, это не предел). Параллельно с этим «доведём до ума» программную часть и электронику – там ничего особо нового, все идеи взяты из предыдущих устройств качания с некоторой, конечно, корректировкой. И вот он – результат.
Модель Разрез На кроватке
И конечно, видео:
Пока изготовлено лишь несколько экземпляров, процесс доводки и доработки ещё идёт. Кроме того, электронная часть взята самая простая – с управлением маленьким пультом-брелоком. С помощью пульта можно запустить и остановить качание, а также выбрать одну из шести возможных мощностей укачивания. Дип-переключателями на корпусе устройства можно выбрать время качания – от 15 минут до бесконечности, всего 8 вариантов установок. Также кроватку можно остановить рукой – просто затормозить и подержать 3-5 секунд. В планах – управление с помощью большого пульта с экраном, и по Wi-Fi – всё как в предыдущих устройствах для кроваток с маятником. Добавятся ещё датчик плача и датчик движения, время качания можно будет также устанавливать дистанционно, а не переключателями на корпусе.
По мотивам разработки мною был получен патент на полезную модель 200048 «Устройство качания мебели для лежания или сидения».
А дальше? Практика – критерий истины. Нужно изготовить небольшую партию изделий и проверить коммерческую привлекательность и перспективность. Но это уже совсем другая история, которая, к тому же, только начинается.
Как я разработал устройство для качания детской кроватки
Еще бывают колыбели – маленькая люлька, которую удобно ставить рядом с собой, когда занимаешься чем-нибудь, а малыш бодрствует.
Еще есть кровати-манежи, китайские. Есть еще кровати-трансформеры, к ним с торца пристроен комод и пеленальный столик, и тоже есть варианты с маятником. И еще много чего экзотического есть.
Но я был настроен именно на традиционную кроватку, стандартных размеров, из березы или бука, с маятниковым механизмом качания. Ну и как «человек прогрессивный, передовых взглядов» я сразу же задумался о том, что не руками же эту кроватку качать. Наверняка, думал я, давно придуманы механизмы качания, надо просто пойти в магазин и купить.
Однако к моему удивлению обнаружилось, что никакого готового устройства в продаже нет. Зато есть советы. Например, привязать веревочку одним концом к ноге, а другим – к кровати, и, качая ногой, качать кровать. Можно при этом даже за компьютером сидеть. А можно веревочку привязать к столику CD-ROMа, и написать программку, которая будет открывать и закрывать столик с какой-нибудь периодичностью. А еще можно использовать привод дворников от старых «Жигулей». А чтобы не шумело, поместить его в соседней комнате, а веревочку из этой комнаты провести в детскую через систему отверстий, шкивов и блоков. Есть советы еще более радикальные – не качать совсем. Потому что, наверное, это вредно и вообще вот в Спарте, например, детей не качали, и всех все устраивало.
Кроме советов обнаружилось несколько патентов, однако никаких устройств по ним не производится. Был один вроде бы производитель, я бы даже купил, наверное, тогда их устройство. Но на тот момент это уже было невозможно – насколько я понял, производство, если оно и было, они свернули.
Так мне и пришла в голову мысль разработать собственное устройство для качания кроватки.
Я проанализировал все патенты и другие найденные в интернете материалы, которые могли бы мне помочь. Также пришлось разобрать детские китайские электрические качели, чтобы посмотреть, что там внутри.
- Бесшумность. Это значит – никаких моторчиков, шестеренок, редукторов быть не должно. Можно, конечно, городить звукоизоляцию, но лучше изначально обойтись без всего этого.
- Возможность дистанционного управления. А это, в свою очередь, означает способность устройства раскачать кроватку из состояния покоя.
- Простота установки на кроватку. И, как следствие, возможность установки если не на все, то хотя бы на большинство имеющихся в продаже кроваток.
Помните, одно время были популярны «настольные вечные двигатели»? Там в подставке расположена катушка, а в качающейся части – магнит. Достаточно качнуть «двигатель», и он будет качаться до тех пор, пока в нем батарейки не сядут.

Принцип работы устройства прост – магнит, пролетая над катушкой, наводит в ней ЭДС, которая меняет знак в тот момент, когда магнит начинает удаляться от катушки. Вот на этом же принципе я и решил создать свое устройство. Важный момент – в качестве датчика я решил использовать ту же самую приводную катушку (а не, например, другую катушку, оптопару или датчик Холла). Другими словами, микроконтроллер (а конструкция собрана, конечно, именно на нем) сначала «слушает» ЭДС в катушке, а потом в нужный момент времени подключает ту же самую катушку к источнику питания.
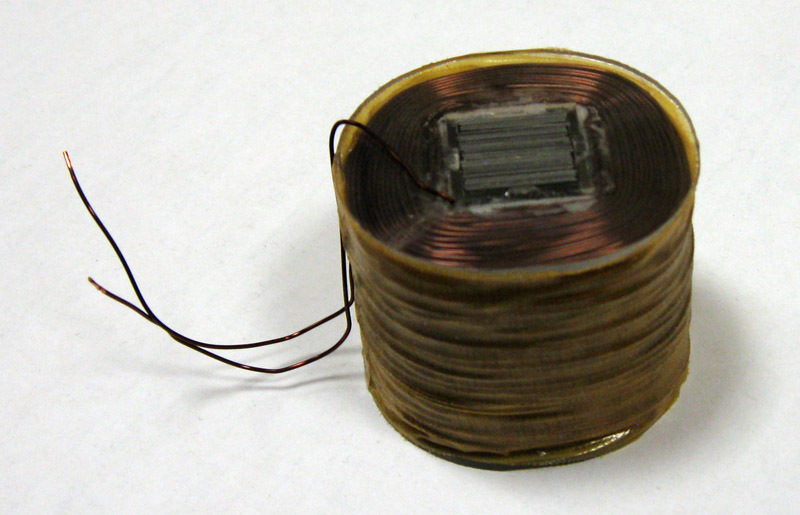
Проходя путь от идеи до готового устройства, мне пришлось решить множество вопросов. В качестве микроконтроллера подошел ATtiny24. Магнит был выбран неодимовый, в виде шайбы, диаметром 15 мм и толщиной 8 мм. Отдельная история с катушкой – ее параметры пришлось скрупулезно подбирать, используя как и некоторую теорию, так и несколько катушек-прототипов c разными размерами, диаметрами провода и количеством витков. Также варьировались геометрия и материалы сердечника. Конечно, мне хотелось сделать магнитную систему как можно более замкнутой, в идеале магнит должен двигаться с минимальными зазорами между полюсами сердечника. В этом случае достигался бы наибольший КПД устройства (а значит, и минимальное количество меди в обмотке). Однако в угоду простоты конструкции высоким КПД пришлось пожертвовать. Один из вариантов катушки (не окончательный) приведен на фотографии.
Для того, чтобы механизм качания мог сдвинуть кроватку с места, было предусмотрено некоторое смещение катушки относительно магнита в положении равновесия.
Дистанционное управление было выполнено с помощью готового китайского пульта с четырьмя кнопками (пуск, стоп, больше, меньше) и приемника к нему. Сейчас используется такой пульт:
В программе для микроконтроллера было предусмотрено шесть скоростей качания (меняется, по сути дела, длина подталкивающего импульса). Для шестой скорости алгоритм несколько сложнее – там используется серия коротких импульсов с проверкой полярности наводимой ЭДС в паузах между ними. Это позволяет достичь максимальной энергии качания.
На протяжении этих трех лет по мере возникновения новых идей программа совершенствуется. Например, был опробован (и сейчас используется) алгоритм динамического изменения длины импульсов в зависимости от периода качания кроватки. Также был создан алгоритм для плавного нарастания и плавного спада тока в приводной катушке, что определяет полную, абсолютную бесшумность устройства. Без этого усовершенствования устройство при работе все же издавало некоторый звук, похожий на тиканье часов. Есть еще идея создания ПИ-регулятора с обратной связью по амплитуде качания, но здесь пока не решена проблема определения этой самой амплитуды с помощью имеющегося «датчика».
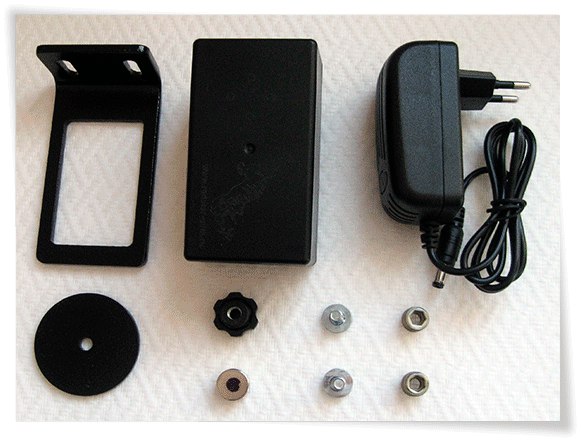
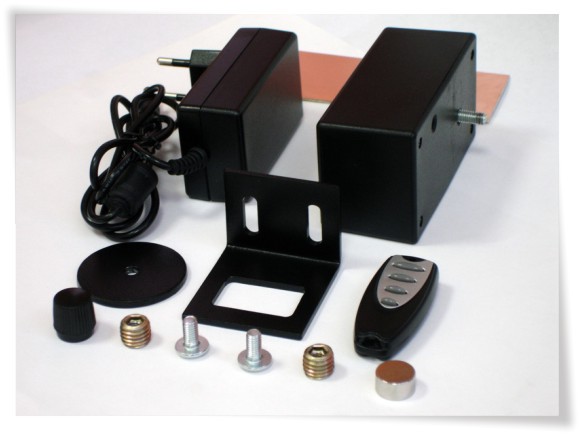
В качестве корпуса устройства был выбран готовый корпус Gainta, через какое-то время он обзавелся красивой картинкой, выгравированной лазером.
Блок питания – готовый, 12 В, 2 А.
Еще несколько фотографий устройства:
Нестандартные крепежные детали вырезаны с помощью лазерной резки и окрашены порошковой краской.
Мы пользовались нашим устройством качания около года, жена осталась очень довольна. А потом дитя отказалось укачиваться в кроватке, и устройство оказалось неактуально для нас.
А потом оказалось, что такие устройства можно продавать. Но это уже другая история.
Если вам понравится эта статья, я могу рассказать:
— о том, как я получал патент на полезную модель, и как он оказался практически бесполезным в реально произошедшем случае нарушения моих патентных прав;
— о том, как я начал серийно выпускать и продавать устройства качания, но пока так и не разбогател;
— о том, как у устройства появился новый пульт управления с экраном от Nokia 1202, а также дополнительные функции.
Маятниковый механизм для детской кроватки «Хенсвик»

1. Покупаем на заказ ЛДСП 16 мм с распилом и оклейкой кромкой ПВХ 0,4 мм.
a. 700×1082 мм – 1 шт. оклейка по всему периметру
b. 700×300 мм – 2 шт. оклейка по трём сторонам 300-700-300
c. 300×1050 мм – 2 шт. оклейка по одной стороне 1050
d. 300×668 мм – 2 шт. оклейка по одной стороне 668
Двойные боковые стенки сделаны для того, чтобы выдерживать вес кроватки и малыша.
2. Выпиливаем из лицевой панели отверстие 590×200 мм и проклеиваем кантом. Нижняя часть кроватки будет служить ящиком для хранения вещей (размеры 1018×668×320 мм).
3. Из металлического листа или профильной трубы вырезаем 4 планки 200×30×2 мм для удлинения ножек кроватки. Высверливаем отверстия диаметром 10 мм под болты, отступив 20 мм от нижнего края и 15 мм по бокам, диаметром 5 мм под саморезы с пресшайбой 4,2×14 мм для крепления к ножкам кроватки (3 отверстия на 100 мм планки вполне достаточно), а также отверстия диаметром 10 мм в металлических уголках 40×40×40×2 на расстоянии 16 мм от края и по 20 мм по бокам.

4. Из куска 15 мм доски делаем 4 маятника (размеры 215×70×15 мм) и высверливаем отверстия диаметром 30 мм по диаметру подшипников, отступив по 35 мм от краев.

5. Вклеиваем подшипники в отверстия клеем «CosmoFen CA 12» или любым другим. Этот клей не только металл к дереву приклеивает, будьте аккуратнее с пальцами рук!

6. Для более эстетичного внешнего вида покрасим заготовленные планки, уголки и маятники с вклеенными подшипниками, предварительно закрыв их малярным скотчем.



7. Высверливаем отверстия в ЛДСП под винты-конфирматы 7×70 (диаметр сверла 5 мм).
8. Собираем короб по схеме из п.1. 12 винтов вкручиваются снизу, 8 – с боковых стенок.



9. Прикручиваем металлические уголки на саморезы с пресшайбой с внутренней стороны по углам короба на расстоянии 15 мм от верхнего края. Высверливаем через уголок отверстие диаметром 10 мм через два слоя ЛДСП. С внутренней стороны вставляем болт M10×80, с наружной стороны закручиваем туго гайкой с шайбой. Дальнейший порядок сборки виден на правой картинке (металлическую планку прикручивать не нужно!).


10. Крепим подпятники для мебели к основанию короба саморезами с пресшайбой (от ножек решил отказаться, чтобы не поднимать кроватку ещё выше!)

11. Фиксируем саморезами с пресшайбой заготовленные металлические планки с внутренней стороны ножек кроватки ровно на половину длины планки (100 мм). Вставляем болт M10×50 с внешней стороны кроватки с двумя шайбами с обеих сторон планки и затягиваем гайкой. После того, как планки будут прикручены к ножкам, кроватку необходимо собрать и установить на маятники (лучше вдвоём – один держит кроватку, второй – вставляет болты в маятники) проще всего это делать при поднятых вверх маятниках и закрученных регулировочных гайках.

12. Регулировка кроватки влево-вправо относительно короба осуществляется путём регулировки гаек между маятником и коробом или маятником и ножкой.

13. В результате проделанной работы должно получиться примерно следующее:

Регулировка кроватки по уровню осуществляется при помощи подпятников.
Планки на ножки прикручивали, чтобы удлинить маятник и, соответственно, плавность его хода (получилось 145 мм между центрами болтов маятника).
Высота кроватки увеличилась на 22 см (с 795 мм до 1015 мм до верхнего края бортика) – это надо учитывать при невысоком росте родителей. Высоту можно сделать чуть ниже, уменьшив изначально высоту панелей ЛДСП, но не более чем на 85 мм, иначе маятники будут тереться по полу.
Вес основания в сборе около 28 кг, вес кроватки 16,3 кг – опрокидываться не будет даже при сильном раскачивании! При вертикальной нагрузке на боковые стенки кроватки конструкция выдерживает вес не менее 60 кг (проверено лично!), при максимально допустимой нагрузке на днище кроватки 20 кг (из инструкции).
P.S. Конструкция с качанием вперёд-назад была выбрана из-за того, что расстояние от стены до кроватки и от кроватки до шкафа-купе всего по 2 см. От задней стены нижний короб отодвинут на 7 см – чего вполне достаточно для плавного раскачивания.
Подробная инструкция в формате pdf выложена на Яндекс.Диск
Стоимость материалов (по состоянию на 28.04.2015):
ЛДСП 16 мм «Дятьково» (белый 999) – на заказ — 1022,00 руб.
Подшипник 180500 (62200-2RS) (8 шт. × 40 руб.) — 320,00 руб.
Баллончик эмали «Jobi» (цвет белый матовый) — 223,10 руб.
Винт-конфирмат 7×70 (20 шт. × 2,08 руб.) — 41,60 руб.
Болт M10×80 DIN 933 (4 шт. × 8,48 руб.) — 33,92 руб.
Болт M10×50 DIN 933 (4 шт. × 7,2 руб.) — 28,80 руб.
Гайка шестигранная M10 DIN 934 (24 шт. × 1,92 руб.) — 46,08 руб.
Шайба увеличенная M10 DIN 9021 (12 шт. × 2,12 руб.) — 25,44 руб.
Уголок монтажный KM1 40×40×40×2 (4 шт. × 12 руб.) — 48,00 руб.
Кант накладной 16 мм (цвет белый) 1 метр — 26,19 руб.
Подпятник для мебели регулируемый (4 шт. × 30,07 руб.) — 120,28 руб.
ИТОГО: 1935,41 руб.
В наличии имелись:
саморезы с пресшайбой 4,2×14 мм (32 шт.)
кусок доски 140×15 мм (43 см)
кусок профильной трубы 40×20×2 мм (80 см)
свёрла по металлу диаметром 5 и 10 мм
коронка по дереву диаметром 30 мм
цианакрилатный секундный клей «CosmoFen CA 12»
наждачная бумага со средней зернистостью
малярный скотч 40 мм
От автора:
Кроватку собрал 28 апреля, а 2-го мая у меня родилась дочка=)
Просьба сильно не ругать, если описанные выше действия без подробных чертежей и инструкций. По своей профессии я не отношусь ни к плотникам, ни к столярам, я всего лишь программист.
Все работы производились мною без специального оборудования. В наличии были электролобзик, болгарка, шуруповёрт, прямые ®уки и ©ветлая голова.
Читайте также: